
Building General-Purpose Robots, Skill by Skill
Joined October 2024
- Tweets 27
- Following 8
- Followers 618
- Likes 15
10 Photos and videos









Pinned Tweet

6 Nov 2024
Meet #Hillbot Alpha, the first fully autonomous mobile manipulation robot trained using sim-to-real technology.
Designed in Hillbot’s San Diego headquarters, Hillbot Alpha represents the potential of data synthesis via simulation in robotics.
#AGI #EmbodiedAI #AI #Sim2Real
2
9
31
10,412
7 Jul 2025
#Hillbot's ManiSkill powered multiple papers at #RSS2025 — including 2 best paper nominees and 1 workshop best paper award!
🏆 Best Paper @ CRLH: sanjanasrivastava.github.io/…
🥈 Runner-Up @ EgoAct: portal-cornell.github.io/X-S…
Try #ManiSkill yourself: maniskill.ai/ 🚀
9
1,249

📣 Announcing: #NVIDIACosmos
The world foundation model development platform for advancing physical #AI systems such as autonomous vehicles and robots.
Learn more 👉 nvda.ws/4fGKiDX

30
131
466
89,936
7 Jan 2025
Proud moment for Hillbot! We were featured in Jensen Huang's keynote presentation at #CES2025📷!
Using NVIDIA Cosmos, Hillbot is pushing the boundaries of robotic training with terabytes of AI-generated high-fidelity 3D environments.
Read More: hillbot.ai/blog/hillbot-nvid…
5
26
4,550
Hillbot retweeted

7 Jan 2025
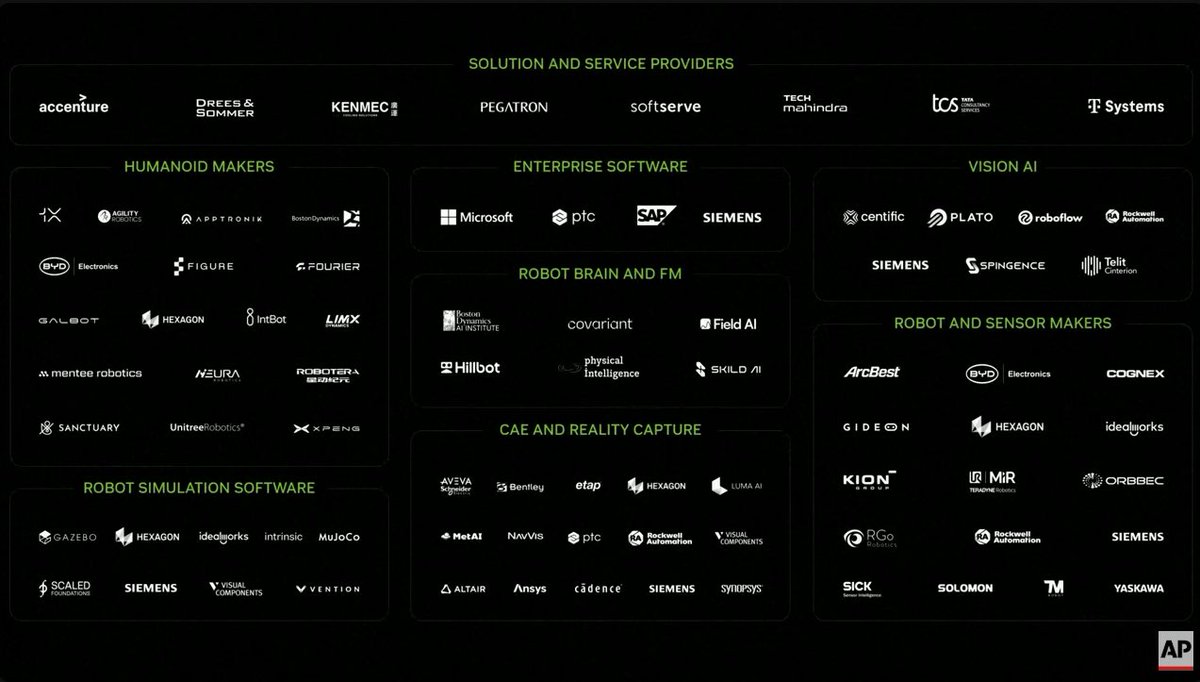
all the robotics related companies highlighted by Jensen at #CES2025
notably a very high proportion of 4/6 robot brain/foundation model focused companies are started by current professors (including my own advisor!). Covariant, Hillbot, Physical Intelligence, and Skild AI

6
9
91
11,511
31 Dec 2024
Questions/Learnings from 2024...
🤖#Robotics is moving fast, but still hasn’t met its promise. Yet.
🧍♂️#Humanoids dominate the conversation. Will they live up to the hype?
💾#Trainingdata is VERY hard to come by. Is simulation the answer?
What do you think? #HappyNewYear2025
9
1,085
19 Dec 2024
#HappyHolidays from Hillbot! 🎄
Here’s three things we’re especially grateful for this year:
💡Our incredible team—Hillbot is growing fast!
🤝Our partners, who help bring our vision to life.
🤖The robotics community, who continue driving innovation.
What are you grateful for?
7
936
Hillbot retweeted

12 Dec 2024
Excited to present MeshFormer at Oral Session 4D this afternoon! 🎉
Feel free to drop by our poster session (East #1309) later today, or join us at the @Hillbot_AI happy hour tonight. 🍺🦞🦪🥂🐔
Let’s catch up and chat about anything!
lu.ma/whjl0c2h


7
64
5,644
12 Dec 2024
Looking to wind down after #NeurIPS2024?
Come to Terminal City Club at 7:30 PM tonight for a happy hour featuring some of the brightest minds in robotics and AI.
lu.ma/whjl0c2h
#NeurIPS
1
5
1,475
5 Dec 2024
In your opinion, which type of synthetic data will have the largest impact on generalizable robotic skilling?
22%
Generated Scenes/Objects
33%
Randomized Tasks & Goals
44%
High-quality Robot Demos
0%
Interference/Perturbation
18 votes • Final results
1
3
1,275
4 Dec 2024
Going to #NeurIPS2024?
Join us on Thursday, December 12th at Terminal City Club for a happy hour featuring Hillbot co-founder and CTO @haosu_twitr!
Register now on Luma!
lu.ma/whjl0c2h
1
5
1,646
3 Dec 2024
Hillbot is thrilled to be featured in NVIDIA’s article on #Sim2Real innovation. Our #generativeAI training is accelerating robot skilling & deployment. Thanks NVIDIA for spotlighting our work in #EmbodiedAI.
Read more: blogs.nvidia.com/blog/robot-…
2
26
2,613
19 Nov 2024
Infinite synthetic training data. Fantasy, or reality?
That's how we trained #Hillbot Alpha, using #sim2real and #generativeAI technology with just a hint of real world data.
Learn more in our blog:
blog.hillbot.ai/meet-hillbot…
1
2
15
1,670
14 Nov 2024
Check out the full demonstration of Hillbot Alpha, our autonomous mobile manipulation robot performing long-horizon shelf stocking, trained using #sim2real technology.
#AGI #EmbodiedAI #AI #ArtificialIntelligence #Simulation #robots #autonomousrobots #computervision
2
20
100
30,897