
We are the Interactive Robotics Group at MIT, a part of the Computer Science and Artificial Intelligence Laboratory (CSAIL) and the Aero/Astro Department.
Joined November 2011
- Tweets 331
- Following 70
- Followers 3,280
- Likes 91
23 Photos and videos








Pinned Tweet

24 Feb 2017
.@julie_a_shah on the #futureofwork in @NYTmag: how can robots work with (not replace) people to make lives better? mobile.nytimes.com/2017/02/2…
1
7
16
MITRobotics retweeted

23 Apr 2025
.@MIT_CSAIL PhD candidate Felix Yanwei Wang is in the final year of his program working with the lab’s Interactive Robotics Group, researching robot learning, specifically inference-time policy alignment through human interactions.
Read more about Felix: bit.ly/445dEtA

3
6
526
MITRobotics retweeted

3 Dec 2024
Want your robot to clean the kitchen your way? 🧹✨
🔗yanweiw.github.io/itps/"
Introducing Inference-Time Policy Steering: a training-free method that lets you specify where and how to manipulate objects, so you can guide non-interactive policies to align with your preferences!
2
19
100
27,314
MITRobotics retweeted

8 Dec 2024
Excited to present our #NeurIPS2024 Oral talk! 🚀
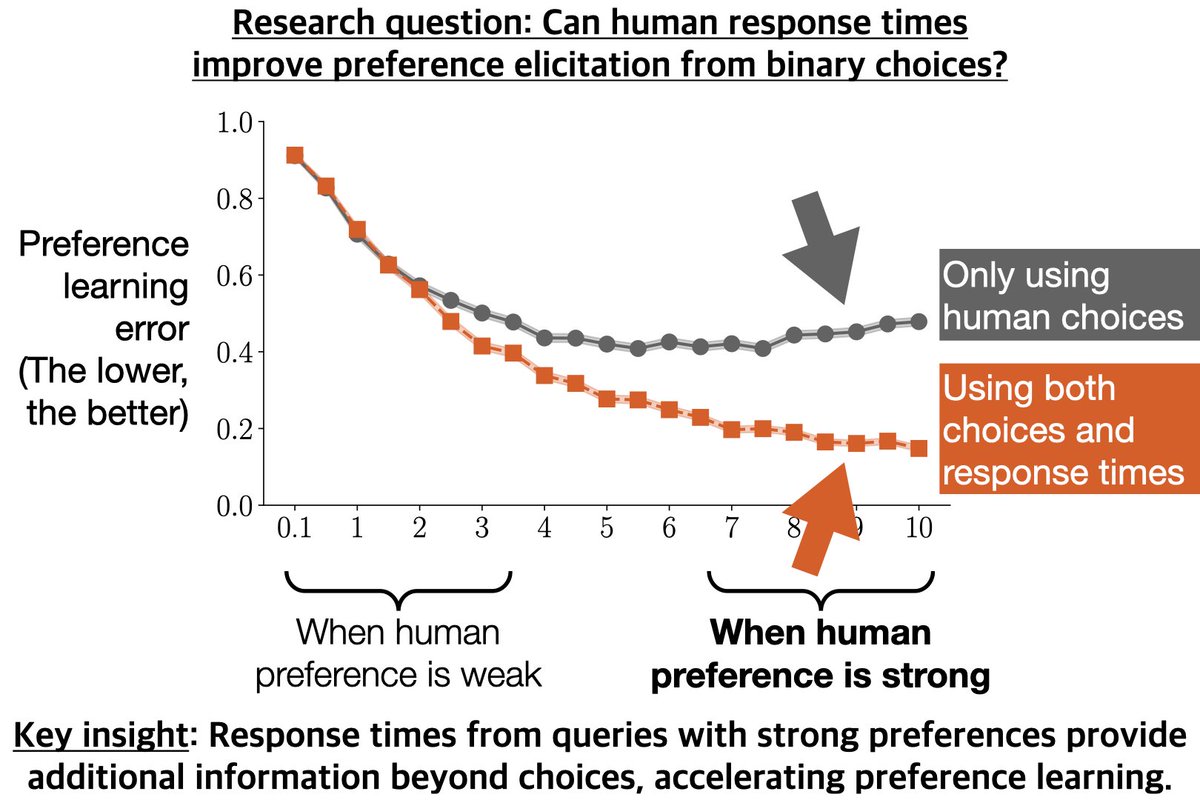
Enhancing Preference-based Linear Bandits via Human Response Time
Coffee or tea? If you choose instantly, you likely have a strong preference. How can AI leverage this psychological insight to better learn human preferences?
Curious? Don't think too long! Let's connect and explore how psychology drives smarter AI.
📅 Dec. 11, 3:30-3:50 PM PST
📍 Oral Session 2A: Agents (East Ballroom A, B)
👉 Conference Session neurips.cc/virtual/2024/post…
👉 Paper on arXiv arxiv.org/pdf/2409.05798
10 Sep 2024

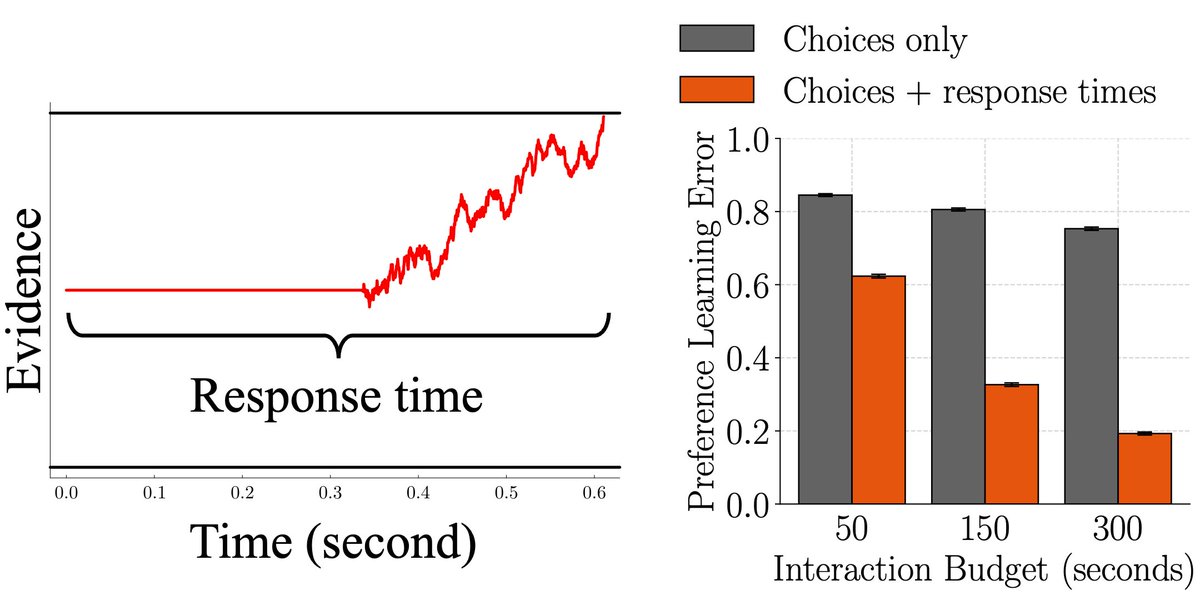
Excited to share our new work: Enhancing Preference-based Linear Bandits via Human Response Time ⏱️🤖
@edgeyyzhang, Zhaolin Ren, Prof. Na Li, @ClaireYLiang, Prof. @julie_a_shah
👉 arxiv.org/abs/2409.05798
We show that human response times provide information about human preference strength, and speed up preference learning. This complements existing bandit algorithms that only learn from binary choices. We demonstrate this by integrating a psychology model (the EZ-Diffusion Model) into a bandit algorithm.
#AI #MachineLearning #RLHF #HumanFeedback #psychology #Bandits #Robotics #EZDiffusionModel
4
6
1,396
MITRobotics retweeted

5 Nov 2024
Announcing Versatile Demonstration Interface (VDI) – a tool for collaborative robots that makes it easier to collect task demonstrations using three common Learning from Demonstration approaches.
1
3
5
892
21 Feb 2023
** New ICLR Spotlight Paper 2023 **
Excited to announce our work building inherently interpretable Deep RL agents that doesn't sacrifice performance, and calibrates appropriate user trust.
(details below...)
openreview.net/forum?id=hWwY…
By @EoinKNNy, @MycalTucker, and @julie_a_shah
2
4
9
2,052
21 Feb 2023
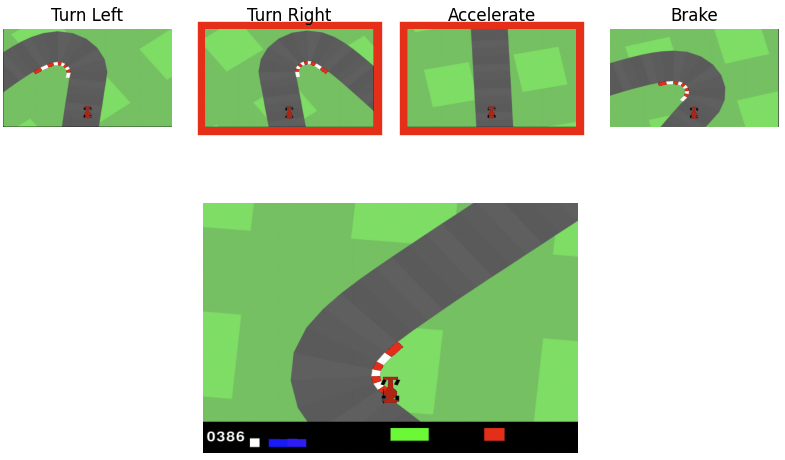
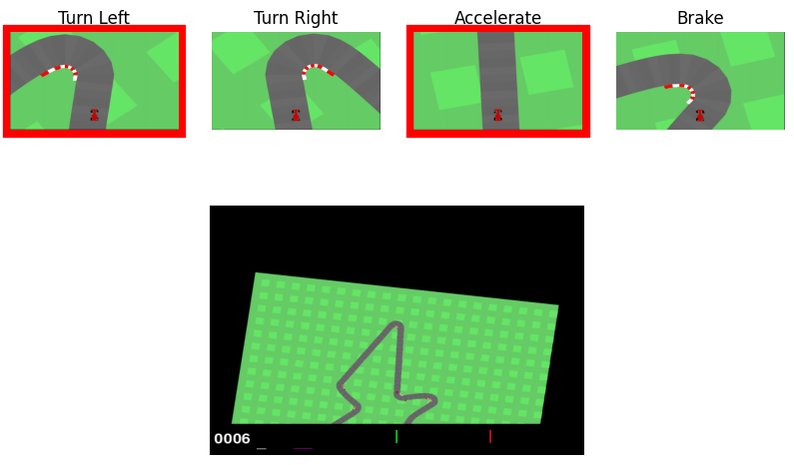
As another example, here the state is similar to the prototypes for "Accelerate" and "Turn Right", so the agent accelerates and turns right.
Our human study shows this research has the potential to help users predict out of distribution failures.
481
21 Feb 2023
The work forces an agent to make decisions based on the current state's similarity to pre-defined human-interpretable prototypes.
For example, here the state is similar to the prototypes for "Brake" and "Turn Left", so the agent brakes and turns left.
1
361
7 Feb 2023
Talk to Serena at AAAI about how standard reward tuning via trial-and-error has many lurking dangers!
1
661
16 Dec 2022
Neat work combining ideas from formal methods, stable control policies, and imitation learning!
16 Dec 2022

How to guarantee successful imitation of multi-step tasks despite arbitrary perturbations?
1-2 demos a logic formula of task specification.
See our #CoRL2022 oral talk today at 4:30p!
Paper: yanweiw.github.io/tli (with @robo_kween @shenli_robotics @ankitjs @julie_a_shah)
1
9
1,261
MITRobotics retweeted

8 Nov 2022
Before everyone flees twitter... new paper coming out at NeurIPS!
Humans compress meanings into complexity limited discrete representations (words). Can neural nets learn similar communication? Yes! (1/7)
2
24
165
MITRobotics retweeted
14 Oct 2022
Super grateful for this chance to continue exciting *interdisciplinary* research. Thanks to my advisor, @julie_a_shah, but also so many collaborators from other departments (@roger_p_levy and @NogaZaslavsky) and inspiring labmates and researchers.
13 Oct 2022

Amazon and @MIT_SCC announced their first set of Amazon Fellows as part of their Science Hub, which aims to expand participation in AI, robotics, and other fields. They will receive funding to conduct independent research projects at MIT. Meet the fellows. #MachineLearning
1
3
15
MITRobotics retweeted
29 Aug 2022
New journal paper on Latent Space Alignment! Neural agents learn latent representations spaces, but often each agent learns its own idiosyncratic space. How can we align those space among agents or even with humans? tandfonline.com/doi/full/10.…
1
4
15
MITRobotics retweeted
19 Aug 2022
Happy to announce... Well, this paper didn't get in, but I still think it's neat. Using the same probe-based method for testing if language models use representations of syntax, we can "fix" RL agent perception (e.g., notice an oncoming car): arxiv.org/abs/2201.12938
2
1
3
MITRobotics retweeted
8 Aug 2022
It's Monday morning, which means it's the perfect time to start thinking about information theory, brains, and neural nets! Submit to #InfoCog2022 @NeurIPSConf
Organized by @NogaZaslavsky @gershbrain
@sepalmerNeuro @C4COMPUTATION
sites.google.com/view/infoco…
1
1
5
MITRobotics retweeted

6 Aug 2022
📣 Very excited to announce our in-person #NeurIPS2022 workshop on Information-Theoretic Principles in Cognitive Systems!
Check out our lineup of invited speakers and CFP, submit short papers by September 19
sites.google.com/view/infoco…
#InfoCog2022 @NeurIPSConf
1
27
99
MITRobotics retweeted
31 May 2022
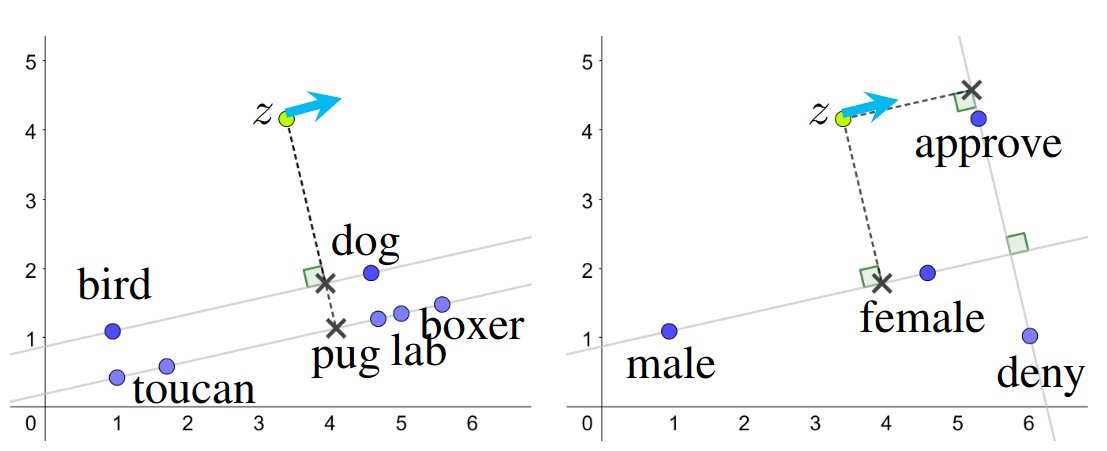
New paper (to appear in ICML)! Using a new prototype-based classifier, we show how notions of fair and hierarchical classification are tightly related, and how we can directly control "concept relationships" to switch between modes.
1
2
14
MITRobotics retweeted

24 May 2022
What a great start of @ieee_ras_icra. The #icra2022 workshop on #cobots and @workofthefuture organised by @robo_kween, @julie_a_shah, Chris Fourie, Ben Armstrong & co-organisers was wonderful! sites.google.com/view/icra22…
1
4
5 May 2022
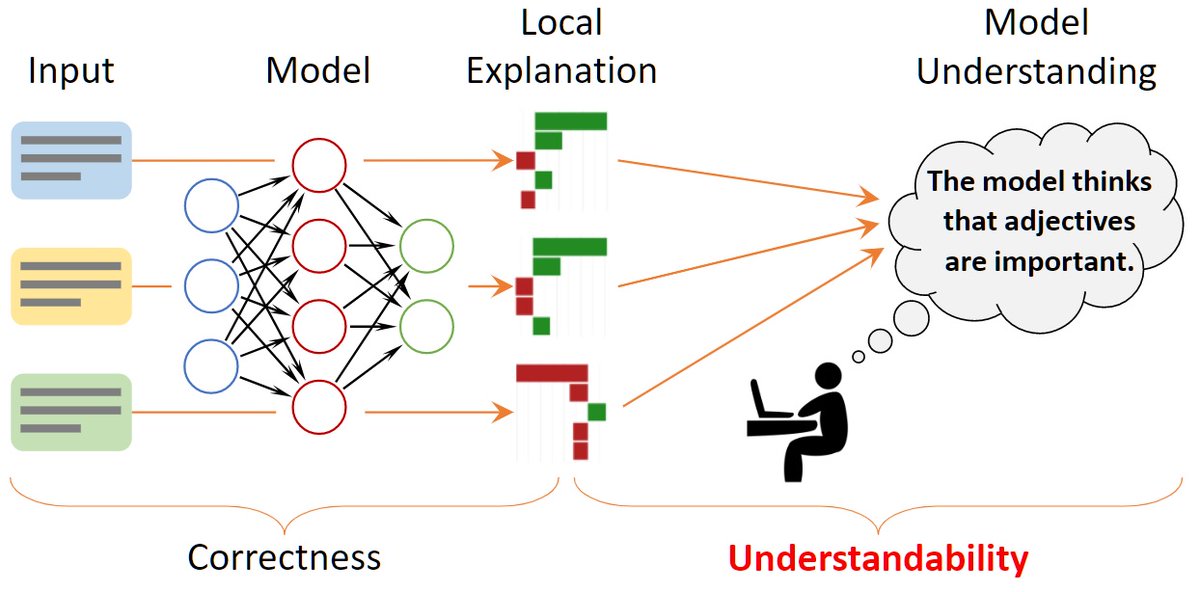
Excited to share our latest paper to appear at NAACL this year, ExSum: From Local Explanations to Model Understanding, in collaboration with Marco Tulio Ribeiro from Microsoft Research.
ALT A diagram of the ExSum framework.
1
5
5 May 2022
Overall, we propose understandability as a new dimension for evaluating local explanations. More details in the paper arxiv.org/pdf/2205.00130.pdf, or read the MIT news release on it news.mit.edu/2022/machine-le….
2
1
5 May 2022
And, research is more fun when its is interactive. That's why we released ExSum as a python package so that *you* can also play with it. More details on the project website: yilunzhou.github.io/exsum/!
1