
5,803 Photos and videos





Pinned Tweet

Effective negotiation hinges on clear communication, active listening, emotional control, deep preparation, and the ability to find mutual ground, forming the bedrock of fruitful agreements.
#Strategy #PersonalGrowth #Motivation

2
5
10
626


Edge Technology News retweeted

10 Ways AI Tools Enhance Customer Engagement for Brands app.quuu.co/r/pYNEv2 @StartGrowthHack
6
6
171
Edge Technology News retweeted

Modern AI agents have evolved beyond a simple state graph and a few tool calls. Google Developer Expert @Sam_Witteveen shares 5 components you need to build world-class agents.
Join Gemini Enterprise Agent Ready (GEAR) for the latest agent resources → goo.gle/4aOOZvB
6
25
87
6,135
Edge Technology News retweeted
AI is entering school administration through automation of repetitive processes, changing how time and attention are allocated across staff.
Institutions are pushed to rethink roles and data practices to keep operations consistent and accountable.
Microblog @antgrasso

3
38
72
1,145
Edge Technology News retweeted

"A leader is one who knows the way, goes the way and shows the way".
- John Maxwell
#Leadership #LeadershipMatters #LeadershipDevelopment #Management #Business
1
8
11
326
Edge Technology News retweeted

Jun 13
New digital tools could make Europe's shipyards greener and more competitive.
The EU-funded ESY project develops technologies to track energy use, reduce waste and improve efficiency, helping shipyards lower their footprint and cut costs.
#WeekendRead: link.europa.eu/Fd8mq6

3
9
38
1,259
Edge Technology News retweeted

Jun 12
IBM, ServiceNow team to bring AI to legacy enterprise systems
spr.ly/6012B8Aly6
8
8
431
Edge Technology News retweeted

Jun 8
Antonio raises an important point: Embodied AI makes the AGI discussion more concrete. AGIBOT WORLD CHALLENGE @ ICRA 2026 shows why robotics needs evaluation beyond simulation, with real tasks, real robots, and measurable progress.
Jun 5

AGIBOT WORLD CHALLENGE @ ICRA 2026 caught my attention because I have recently been studying AGI, and I am still actively researching it.
Embodied AI brings a key question into the physical world: so how do we evaluate intelligence when it must understand, plan, adapt, and act?
In abstract environments, intelligence can be measured through reasoning, language, and prediction.
In robotics, the evaluation becomes more demanding because the system must operate under physical constraints, deal with uncertainty, and turn decisions into reliable action.
This is why AGIBOT WORLD CHALLENGE @ ICRA 2026 is interesting from a technological perspective.
The initiative brings together global research and industry teams around two important dimensions of Embodied AI: Reasoning to Action and World Model.
For me, the most relevant point is the move from simulation-centered evaluation to real-robot validation, with physical tasks, standardized benchmarks, and AGIBOT G2 humanoid robots used in real-world scenarios.
This matters because the future of Embodied AI will depend less on isolated demos and more on measurable progress in stability, adaptability, long-horizon task execution, and deployability.
AGIBOT deserves attention here because it is contributing to a more practical evaluation framework for robotics, where intelligence is assessed through what a system can understand, predict, and do in the physical world.
In partnership with AGIBOT for AGIBOT WORLD CHALLENGE @ ICRA 2026
#AGIBOT #AGIBOTWORLDCHALLENGE #EmbodiedAI #Robotics #ICRA2026 #HumanoidRobots #ArtificialIntelligence
2
20
44
1,068
Edge Technology News retweeted

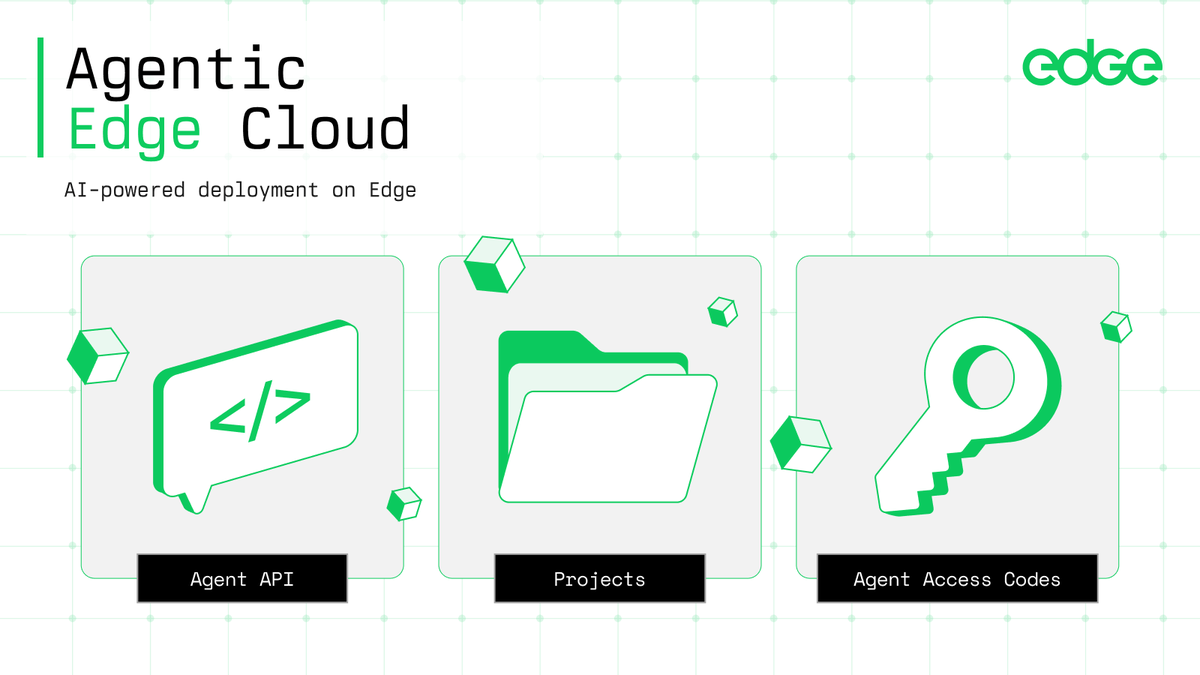
Cloud APIs still assume a human is in the loop.
Errors that say what broke but not what to do next, rate limits you have to guess at, no project-level awareness.
An agent just gets stuck, so you end up writing glue code for everything.
The Edge Agent API skips all of that ⤵︎
3
22
36
984
Edge Technology News retweeted

Jun 10
The FCF mafia doesn’t love these larger than expected capex outlays, but I have said before and will say it again. The existential risk isn’t overspending, but underspending. 👏🏻
6
21
99
12,360
Edge Technology News retweeted
Jun 10
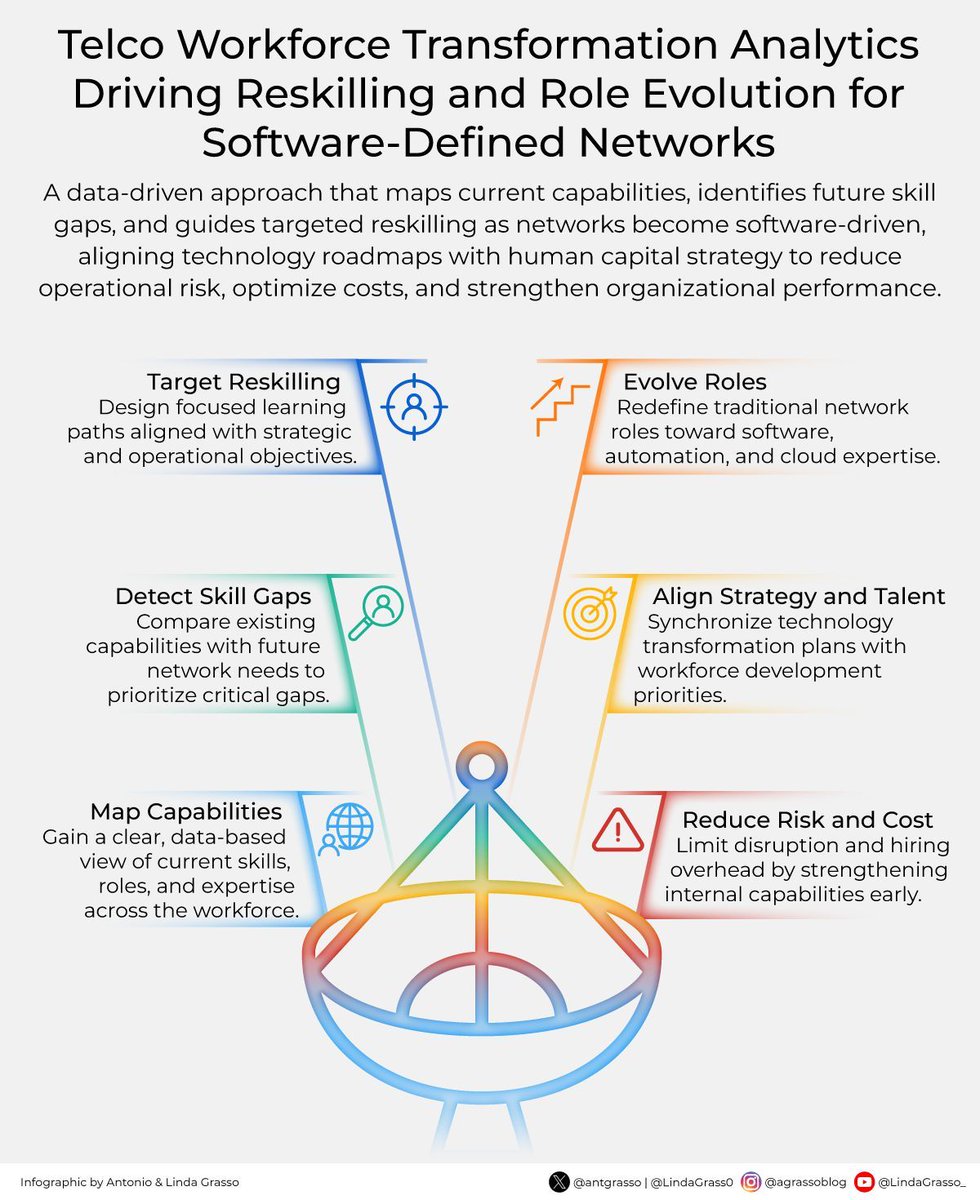
📡 Is your workforce evolving as fast as your technology?
In telco and beyond, transformation isn’t just about networks—it’s about people.
Follow @LindaGrass0 for more insights 💡
1
31
48
848
Edge Technology News retweeted

Jun 11
Sign of the times.
Jun 10

Esto es Europa en estado puro. El Banco Central Europeo frenó permisos a Revolut para sacar nuevos productos financieros porque el BCE está "preocupado sobre la rapidez con la que el banco digital saca nuevos productos"
Revolut, que lo que tiene son tarjetas de crédito y préstamos al consumo le parece muy rápido al BCE 🤡🤡🤡🤡🤡 Prefieren bancos atestados de gente que parecen oficinas del siglo XX donde aún hacen fotocopias.
ft.com/content/7cc86162-f68c… a través de @ft
3
5
428
Edge Technology News retweeted

Jun 10
La Giornata della Marina che celebriamo oggi è per me un'importante occasione per ringraziare uomini e donne in divisa che, spesso lontani da casa e dai propri affetti, con dedizione e sacrificio vegliano sulla sicurezza dei nostri mari e della collettività.
Custodi e garanti degli interessi nazionali, a loro va la nostra profonda riconoscenza per l'impegno silenzioso con cui rappresentano l'Italia e per i valori e lo spirito di servizio che incarnano ogni giorno.
A tutti voi, buona Giornata della Marina.
@ItalianNavy
176
207
1,837
58,516
Edge Technology News retweeted
Jun 10
Un altro segnale incoraggiante per l’economia italiana: ad aprile la produzione industriale cresce ancora, per il terzo mese consecutivo.
Un dato positivo che conferma la tenuta e la vitalità del nostro sistema produttivo, in un contesto internazionale che resta complesso.
Continuiamo a lavorare con serietà e concretezza per sostenere crescita, occupazione e competitività della nostra Nazione.

334
182
1,179
44,586
Edge Technology News retweeted

Jun 10
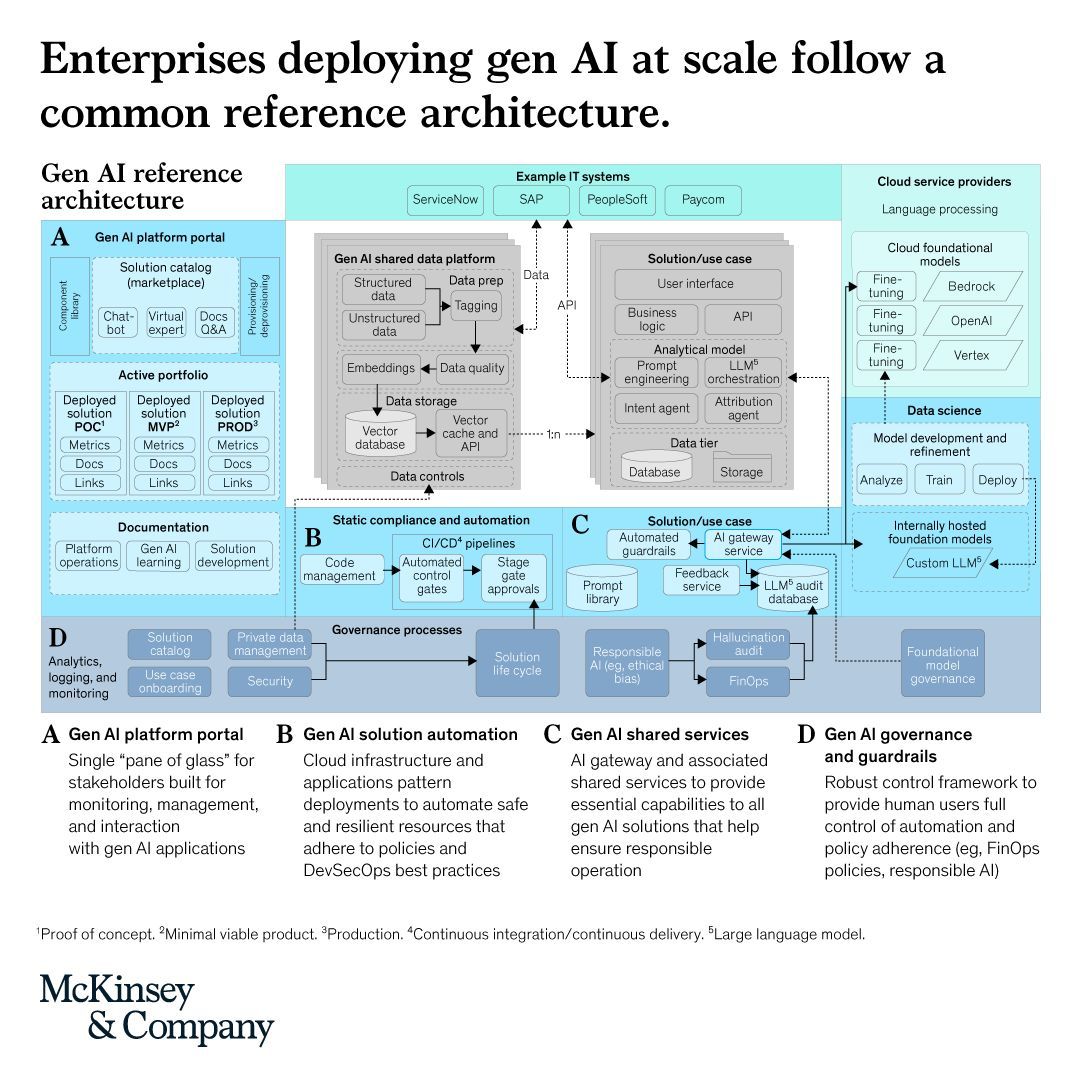
Agentic AI is pushing tech services to pick a clear role, from enabler to full solution builder. Each choice affects skills and delivery, so organizations must decide where to invest and how to scale.
Source @McKinsey Link mck.co/4cCZTGm via @antgrasso

6
44
82
1,603
Edge Technology News retweeted
Jun 10
We're moving from "do this task" to "achieve this outcome." That's a much bigger change than most people realize.
The most interesting AI systems won't just execute instructions—they'll continuously improve their path to the goal.
#HyperagentPartner
Jun 9

Fable 5 on Hyperagent is producing the most creative, ambitious work we've ever seen from our agents.
They're self-improving for hours towards open-ended goals. Visual reasoning has spiked noticeably. Outputs are consistently higher quality than Opus, occasionally at lower cost.
5 of our test cases below vs. Opus 4.8 👇
1. Visualize all asteroids in the solar system from NASA data
2. Design a site plan for a 100 acre fitness retreat
3. Reconstruct Apollo control panels from technical PDFs
4. Simulate the supply chain for World Cup jersey sales based on match outcomes
5. Show the effects of solar flares on aurora
Fable 5 is now available on Hyperagent.
4
56
72
1,763
Edge Technology News retweeted

For those of us that have been around long enough (experience can pay dividends?), remember when MetroMile hit a wall in their strategy and decided to do the exact same thing?
Competitors will just build it themselves. My experience, insurance is not 1 industry, but about 5,000 industries within an industry. One size fits all doesn’t work, just being a student of history on this one.
Kindly, CSR.

2
8
25
2,130

An ungoverned #UnifiedNamespace always leads to topic sprawl and corrupted data lakes.
#EMQX 6.2 introduces broker-level #UNS Governance. Now, you can natively enforce strict ISA-95 topic hierarchies and JSON payload schemas directly at the source.
🔗 buff.ly/XYxA8MN

13
13
302
Edge Technology News retweeted

Our journey at London Tech Week started off with an evening of meaningful conversations and ecosystem connections at the reception hosted by the @biztradegovuk and the @SciTechgovuk
Bringing together policymakers, industry leaders, and innovation stakeholders from India and the UK, the gathering set the stage for discussions on the technologies shaping the future and the partnerships needed to scale them.
The evening also provided an opportunity to engage with leaders H.E. Shri Periasamy Kumaran, High Commissioner of India to the UK, Chandru Iyer, British Deputy High Commissioner to Karnataka and His Majesty’s Deputy Trade Commissioner for Investment, South Asia, Shivendra Singh, VP & Head- Global Trade Development, Nasscom.
As Deeptech becomes increasingly central to economic growth and technological leadership, global collaboration will be key to accelerating innovation, investment, and commercialization.
Looking forward to a week of conversations, partnerships, and opportunities that strengthen the India–UK Deeptech corridor.
@nasscom @nasscomdeeptech @nasscomgtd @biztradegovuk @SciTechgovuk @sangeetagupta29 @ShaliniDewan @nhl_pandya @Mysellercentral @Go_Pazo @roadzeninc @imDhananjay @chandruiyer
#LondonTechWeek #NasscomDeeptech #Deeptech #IndiaUK #TechnologyInnovation #GlobalInnovation



1
4
9
289
Edge Technology News retweeted
Jun 9
You use AI as an assistant, and that can improve the way you work.
But you must keep judgment active, because convincing outputs can still miss context, hide assumptions, or lead to wrong decisions.
Microblog by @antgrasso #ResponsibleAI #AILeadership
10
36
69
1,806