
Building multimodal data infrastructure
Joined February 2025
- Tweets 70
- Following 61
- Followers 2,695
- Likes 339
4 Photos and videos



OpenGraph Labs 🧤 retweeted

Apr 12
2
14
65
6,823
OpenGraph Labs 🧤 retweeted

📖Robotics World Model Reading Club #01 Summary
@BostonDynamics, @Stanford, @AGIBOTofficial, @intbotai, @BytedanceTalk, @Google, @moonlake,
@Rivian, @Meta, @Samsung, @UCBerkeley, @Cruise, @encord_team, @ManycoreTech, @OpenGraph_Labs, @neuralmotion, @AMD, @nvidia, @oysterecosystem, @Zoom, @FusionFundVC, @BoostVC, @yzilabs...
policy learning→WM
VLA: observation→action
WAM: latent world→future trajectory→controllable action
→Shift=reactive mapping→controllable simulation
@nvidia Gr00t (7B, high mem efficiency on Thor)≈DreamDojo-style WAM. Bottleneck is NOT scale, but missing unified interface across perception–geometry–physics–action.
🧠 Representation
Pixel space is redundant & non-geometric.
Trend→Explicit 3D backbone:
point cloud/mesh
object sub-object representations
geometry-aware tracking (contact, affordance)
Point-flow pipeline:
detect→sample keypoint→track→dynamic graph
Core tradeoff=which points&density (motion saliency/affordance attn)
🌍 4D Reconstructi→Unified Latent
@GoogleDeepMind D4RT encodes video→temporally consistent latent field:
geometry motion visibility unified
Outputs: point clouds, 3D tracks, full reconstruct (300× faster)
❗Gap: no shared latent across:
vision/geometry/semantics/action/physics
⚙️ Physics Gap Sim2Real
Gap=physics, not vision:
discontinuous contact
deformable objects (∞ DoF)
non-differentiable friction
Engineering fails: brittle collision meshes, unstable contact
Solutions:
learned physics proxy
hybrid pipeline
convex decomposition (geometry → collision proxy, ~5× speedup)
🎥 Video Pretrain≠Interaction
Video=strong prior but no counterfactuals
Missing: force, depth, tactile, proprioception
→can't answer: what if act differently
⏱️ Control≠Inference
Real world=high-freq loop
action chunking
latent action
FastWAM (train with rollout, infer without)
KV-cache (AutoGaze)
👉control selects feasible trajectory, not full future modeling
Thor is good, but LLM scaling≠robotics scaling
📉 Data
No “robotics internet”:
sim/video/teleop/factory logs fragmented
no unified labeling or metrics
Reality:
factories use fixed primitives
generalization often unnecessary
Bitter lesson: data flywheel>pipelines (but robotics lacks one)
🦾 Embodiment Gap
manipulation→full-body intelligence
loco-manipulation gaze coordination
Need cross-embodiment align (space, action, kinematics)
🔁 Sim2Real Pipeline
human data→semantics→geometry→collision proxy→sim→fine-tuning
Unsolved: deformables, contact stability, long horizon
🧩 Paper
VQVAE (discrete latent)
VL-JEPA (predictive align)
token pruning (efficiency)
recursive models (depth reuse)
multi-path exploration (GRPO)
⚡ Infra→SLM
Real-time stack (LLM infra too slow)
→WM must compress into SLMs
Future=small, domain-specialized, grounded models
🧪Bottlenecks
no unified representation
no data flywheel
inference–control mismatch
physics
fragmented embodiment
Reality can't be scraped like internet.
It must be sensed, interacted, simulated.
👉 Goal: jointly optimize representation simulation action under physics constraints
💡minimal sufficient representation?
can video DiT become WAM?
vertical SLM inevitable?
robotics ImageNet moment?





18
34
321
61,464

Excited to share that @OpenGraph_Labs has been accepted into @NVIDIA’s Inception Program 🚀
Our mission is to build reliable infrastructure for multimodal data capture, powering the next generation of robotics & world models 🌎
3
21
1,640
OpenGraph Labs 🧤 retweeted
Mar 17
World models can predict the next frame.
They can't predict the next touch.
That's the gap visuo-tactile world models will close.
Is the robot gripping hard enough?
Is the surface rigid or soft?
When exactly does contact begin and end?
Vision doesn't know. Tactile does.
We built @OpenGraph_Labs to capture what cameras miss.
Egocentric RGB × 5-finger multi-taxel tactile gloves.
Frame-synced. Calibrated. In-the-wild.
No lab setups. No scripted pick-and-place.
Just humans doing real tasks in real stores.
Watch the exact moment contact happens.
The pressure map lights up in sync. Every touch. Every frame. 👇
4
15
117
12,763
OpenGraph Labs 🧤 retweeted

Mar 15
Robotics & world models require real-world multi-sensory data at scale.
But collecting vision, tactile, and IMU data simultaneously is much harder than it sounds. Each sensor runs at different frequencies, latencies, and clock domains. Integrating them means dealing with hardware quirks, driver inconsistencies, and constant timestamp drift.
This is fundamentally a synchronization problem. And it gets harder as more modalities are added and tasks become longer-horizon, because temporal misalignment compounds: the model loses the causal structure of what happened and when.
We learned this the hard way building our own pipelines. That experience led us to build a unified platform for multimodal capture, one that handles time alignment, hardware abstraction, and data integrity from day one.
@OpenGraph_Labs built 'SyncField - Multimodal Data Capture System " which:
▪️ Supports any hardware configuration (multiple cameras tactile IMU)
▪️ Automatic synchronization across all modalities
▪️ Output is fully time-aligned and ready to train on
It already powers humanoid robotics teams, data collection companies, and university research labs. If your team is collecting multimodal robotics data, we'd love to talk. (now onboarding teams one by one)
17
24
293
17,406
OpenGraph Labs 🧤 retweeted
Mar 11
visuo-tactile world model
tactile sensing is critical for contact state and contact interaction dynamic
Mar 11

Robotics today looks a lot like NLP in 2005.
We hand-code physics simulations the same way linguists hand-coded grammar rules. And it doesn't scale.
A new class of models — world models — learns physics from video instead.
The early results are striking. The gaps are real.
Here's what you need to know. → bvp.com/atlas/can-world-mode…
cc: @TaliaGold, @bhavikvnagda, @gracejhma
1
10
125
24,434
Introducing SyncField, our turnkey solution for in-the-wild data collection that your team can deploy from day1
Data quality = model quality = deployment success 🚀
Mar 11

Data can’t just be outsourced🤯 To iterate fast, robotics teams must own their data infrastructure
Introducing SyncField: turnkey data infrastructure for in-the-wild data collection (Best for UMI-style & Embodied human) #Robotics #UMI #DataCollection
10
1,013

OpenGraph Labs 🧤 retweeted
Feb 28
Are you sure your training data is actually synced?
Egocentric camera sees a hand grasping an orange, but the wrist cam shows nothing and tactile reads zero contact.
Your policy is learning from broken data and doesn't even know it.
In Physical AI, multi-modal sync is everything.
→ Egocentric: 30fps
→ Wrist: 30fps
→ Tactile: 100Hz
Different devices, different clocks, slightly different rates. The drift starts small. Barely noticeable frame by frame. But over a 4-minute episode, that tiny difference compounds into seconds of misalignment. And you had no way to even check.
Until now.
We built the Sync Quality Dashboard. One score tells you if your data is clean. Then go deeper. Clock offset, drift rate, jitter, frame drops, per-stream correction. All visible, all measurable.
In a 4-min episode, accumulated clock drift reached 7.5 seconds by the end of the recording. After correction: 9.0ms. That's the difference between "roughly aligned" and "actually aligned."
Visually confirm vision-to-vision, vision-to-tactile alignment frame by frame. No more "trust me, the data is fine."
We don't just collect multi-modal demos. We ship a quality assurance layer so you can verify every episode before it touches your model.
All data in @LeRobotHF format. Ready to train. Verified in sync.
Stop guessing. Start verifying.
5
11
103
9,872
OpenGraph Labs 🧤 retweeted
Feb 27
VLMs see everything. Feel nothing.
VLMs annotate what looks like contact. Tactile sensors verify what actually is contact.
We ran VLM annotation on real manipulation demos. It labeled a grasp as "approach." Skipped release phases entirely. Hallucinated state transitions that never occurred.
6 out of 36 action phases wrong.
17% of your training data, corrupted.
Why? Pixels don't know when a fingertip touches a surface. Pixels don't know when grip pressure hits zero.
Tactile sensors do.
So we built a pipeline that catches every error automatically. Tactile evidence validates every contact transition. Wrong labels corrected, missing phases inserted.
Not faster labeling. Truthful labeling.
This is one of the core problems we're solving at @OpenGraph_Labs
2
5
43
4,453
OpenGraph Labs 🧤 retweeted
Feb 21
Robots can't learn if their eyes and hands are out of sync.
A 30fps camera and a 1kHz tactile sensor don't speak the same language. Multiple cameras, multiple sensors, all on different clocks at different rates. Jitter from USB and OS scheduling. Drift that compounds every second of recording.
We built a multi-modal sync pipeline that aligns all of it to ±2.5ms. Automatically. Every frame matched. Zero sensor samples lost.
No hardware triggers needed. Sensor-agnostic. Hardware-agnostic. Just plug in and record.
Physical AI needs real hand-eye coordination. Not approximate, precise.
We're building this at OpenGraph.
opengraphlabs.com/
5
39
289
20,715
Tactile feedback is critical for safe and reliable real-world robot deployment 🤚🧤🤖
Really impressive work from @WiYoungsun demonstrating how a shared latent space can bridge tactile signals from wearable gloves to robot embodiments
Feb 17

Dexterous hands vary widely—so do tactile modalities. 🖐️🌈
Our vision on tactile human-to-robot transfer:
🔓 Not tied to specific hardware
♻️ Reuse human tactile demos across embodiments
Presenting TactAlign, a cross-sensor tactile alignment for cross-embodiment policy transfer.
1
6
1,062
OpenGraph Labs 🧤 retweeted
@agihouse_org Robotics Hackathon
💐@OpenGraph_Labs Multimodal Long-Horizon Reasoning
video→temporal segmentation→3D reconstruct→cross-modal predict→task graphs success/failure pattern→self-supervised multimodal encoder
🔹Pouring: ACT subtask-centric
👉🏻linkedin.com/posts/junfan-zh…


4
4
10
2,851
OpenGraph Labs 🧤 retweeted

Feb 8
🏆 Won 1st Place at the AGI Hackathon at @agihouse_org with @juliakeem @JerryHan_og
and @OpenGraph_Labs!
We built a "Temporal Action Segmentation Pipeline" for Physical AI.
The Problem:
Robotics data today = short clips, RGB-only, lab settings.
We need long-horizon, multi-modal, in-the-wild data.
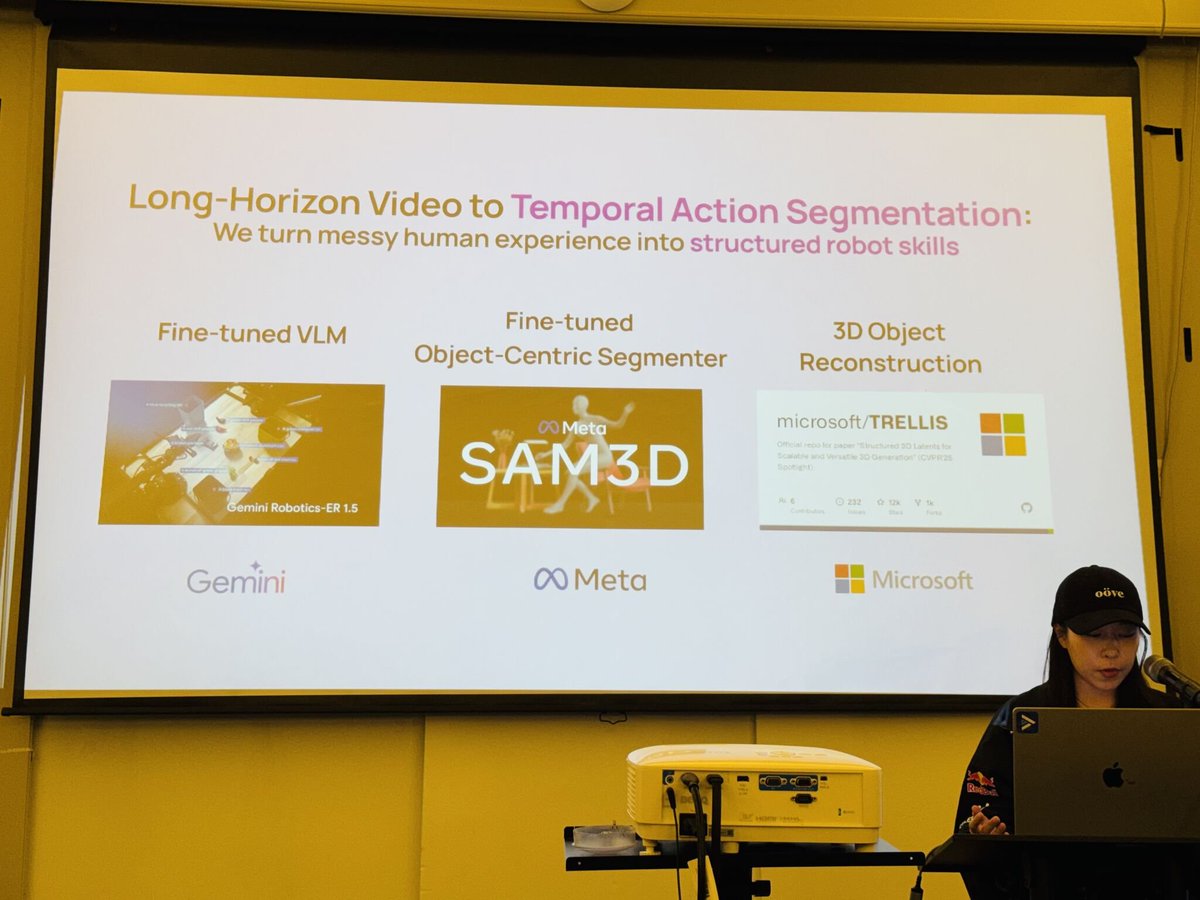
Our Solution:
🎬 Input: Long manipulation video (5 mins)
🤖 Gemini VLM → Action & Phase segmentation
🎯 SAM3 → Object tracking with text prompts
🌐 Pi3 → 3D reconstruction & camera poses
📚 Skill clustering → Reusable skill library
→ Output: Structured robot training data with timestamps, masks & 3D
Humans ARE the ultimate robots 🦾
#PhysicalAI #Robotics #Hackathon #Gemini #SegmentAnything
Huge thanks to @henry_yu_01 @NomadicML @zoox @DynaRobotics

9
8
98
7,595
OpenGraph Labs 🧤 retweeted

Feb 6
Robotics right now feels like peak entropy. Everyone has a different bet on what will work, and they're all confident, which is why doing robotics research right now is so fun.
I wrote an essay on the question that's been driving our work from DreamGen → DreamZero → what’s next
My bet: human experience is the only data source that scales, world models are the right paradigm, and humanoids have the edge.
joeljang.github.io/world-mod…
22
28
272
57,244
Introducing the Tactile Data Engine - the frontier dataset for robotics.
Tactile sensing is the new modality for next-generation robot training and world models, enabling robots to understand physical interaction beyond vision.
Let’s get to the next level 🚀
2
8
65
6,357
7/ From this data, we derive higher-level physical understanding:
- Temporal action segmentation
- Object tracking with SAM3
- Voice modality aligned with actions
- Affordance points with associated touch information
- Real-time physical deformation during contact
1
2
432
8/
On top of this infrastructure, we’re scaling.
Across 30 industries, our tactile gloves are deployed in homes, factories, and service environments. They capture long-horizon manipulation in the real world.
2
396