
Joined January 2025
- Tweets 192
- Following 77
- Followers 31
- Likes 413
76 Photos and videos









Pinned Tweet

9 Nov 2025
Great news, our Tight HAVC Air Filter Removal Tool now is available in both countries : USA and Canada.
amazon.com/shops/tentapc
amazon.ca/dp/B0FXYKLRDN
If you have ever had problems pulling out the filter from its slot, you know this tiny tool will be a good helper at home!
#AirFilter #HVAC #HomeImprovement #DIY #EasyFix #LifeHack #SmallBusiness #FilterChange #HVACtips

1
1
250
May 22
Want to solve a problem, do a small craft, and be handy? 🛠️ Watch this short video to learn how to make a furnace air filter puller right at home! Best local solution. Visit my profile, if you’d rather skip the DIY and grab one Amazon.
#stuckfilter #hvacsolutions #airfilterremoval #lifehacks #tentapc #homerepair #furnace #maintenance
36
May 18
No offense to the tech bros, but without an artist's vision, their worldview is basically just: while(true){ avoid_obstacle(); } 🤖🛑
It’s time to break the loop. What happens when you apply an artist’s palette knife to robotics architecture? You get a clean, three-cut separation of physics and semantics courtesy of the #TMF framework:
1️⃣ Cut 1: Strips the physical medium (normals, friction coefficients) from the semantic world. 2️⃣ Cut 2: Deploys #BMM to define the two-layer computing relationship, giving physics absolute veto power. 3️⃣ Cut 3: Returns time-domain collision prediction to physics, resolving it neatly using position, velocity, and time.
As the knife slashes, semantics lightens. In our framework, semantics only adds; it never vetoes. ✨🚀
🔗 Partial details are already up on my site! Check it out. tentapc.ca
#Robotics #ComputerVision #PhysicsInAI #ArtAndTech #Innovation #tentapcreations #TMF @TechCrunch @WIRED @IEEEorg
12
May 15
No grip? No problem. When your air filter is flush with the unit, our tool gives you the leverage you need. It’s the ultimate hack for stuck filters that won't budge! The next video will show to make it as a small craft project. Visit my profile to get access to Choco and Mochi.
#stuckfilter #hvacmaintenance #airfilter #homemaintenance #lifehacks #tentapc #furnace #diyprojects
15
May 12
From Tesla's Occupancy Network (2022) to the Traversable Medium Framework (2026) — it is humbling to see how AI is opening doors for cross-disciplinary research.
TMF separates physics from semantics — drawing on negative space from art, and Binary Mask Multiplication from mathematics. Sensor conflicts are dissolved, not resolved. The result: autonomous driving decisions that are transparent, accountable, and auditable — a system that knows why it stopped, no more black box!
#AI #SelfDriving #TechTrends #Engineering #TeslaInc
tentapc.ca/articles/How-Laye…
36
Who truly understands space and vision? Not the robotics engineers chasing sensors, but the Renaissance masters, Gestalt psychologists, and modernist rebels who spent centuries decoding figure-ground and negative space. Coming from an art theory background, I just flipped the script on robotics. My new framework collapses "foothold selection" and "traversability" into one unified model governed by a single physical variable: θ. The heated war between Radar and Camera? It’s over. Even @elonmusk ’s "vision-only" dilemma is quietly dismantled—not by a better sensor, but by a better philosophy. The most unexpected and powerful crossover in robotics this year.
Read the full paper, the new version:
@xai @ChatGPTapp @claudeai @grok @deepseek_ai @NvidiaOpenAI @GoogleDeepMind @fchollet @DrJimFan @lexfridman @karpathy
tentapc.ca/articles/unified-… #Robotics #TraversableMedium #ArtAndScience #Interdisciplinary #FigureGround #RobotNavigation
2
31
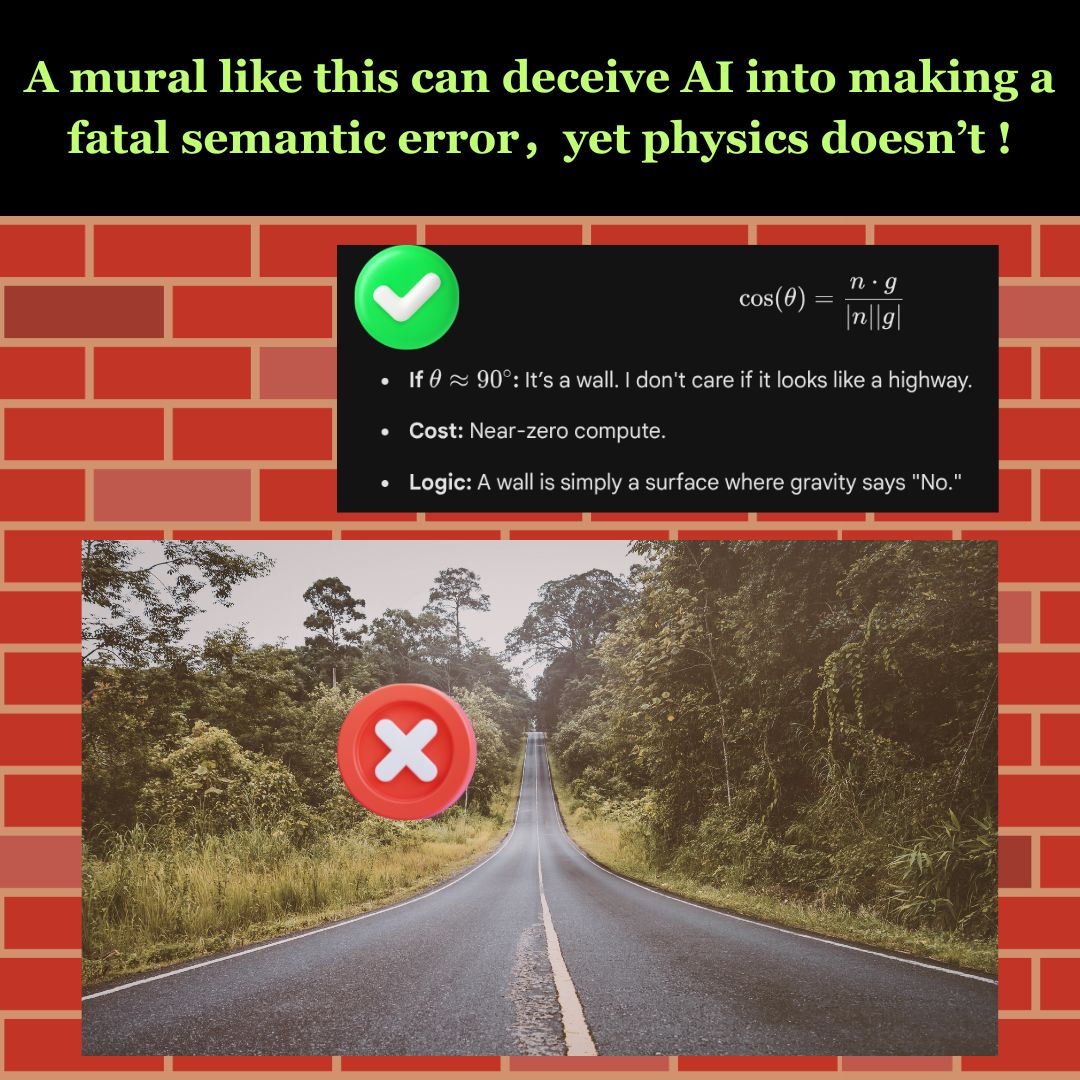
Headline: Why AI fails the "Coyote Test" 🎨🤖If an artist paints a road on a wall, most visual AI will see a path and "accelerate" into a crash. They get lost in the Semantic Illusion—trying to recognize pixels instead of understanding physics. My new framework returns to the Primary Truth: Gravity. By using a single geometric invariant—the angle $\theta$ between a surface normal and gravity—we bypass the labels. In my world:A wall is simply a surface where gravity says "No." 🛑A floor is where physics says "Go." ✅It’s time to stop teaching robots to just "see" labels and start teaching them to "feel" the physical reality. Let's make AI smarter by making it more grounded! 🌍✨#Robotics #EmbodiedAI #ComputerVision #WorldModels #PhysicalIntelligence
35
How Fine Art unifies Robot Navigation: One sensor pass. One physical variable (theta). Two legacy pipelines (Foothold Traversability) resolved. Moving beyond "Classification" to perceive the "Medium." 🎨 🤖
tentapc.ca/articles/unified-… #Robotics #FirstPrinciples #AutonomousSystems
2
40
In art theory, negative volume—often referred to as negative space or voids—is the empty or open space around and between the subjects of an artwork. Instead of focusing on the subject itself (the "positive space" or mass), negative volume focuses on the shapes created by the surrounding area, making the "air" around an object just as crucial to the composition as the object itself. This is one way to build the world model and teach robots understand how to make a plan about their path.
23
Still treating foothold selection and traversability as separate problems in your World model? See this unified physics approach:
#Robotics #WorldModels #EmbodiedAI #SpatialIntelligence #RobotPerception
@drfeifei @ylecun @theworldlabs @pabbeel @karpathy @danfei_xu
1
39
In visual arts, the concept of negative volume (also known as negative space or voids in figure-ground theory) refers to the empty, unoccupied space surrounding and between the main subjects.
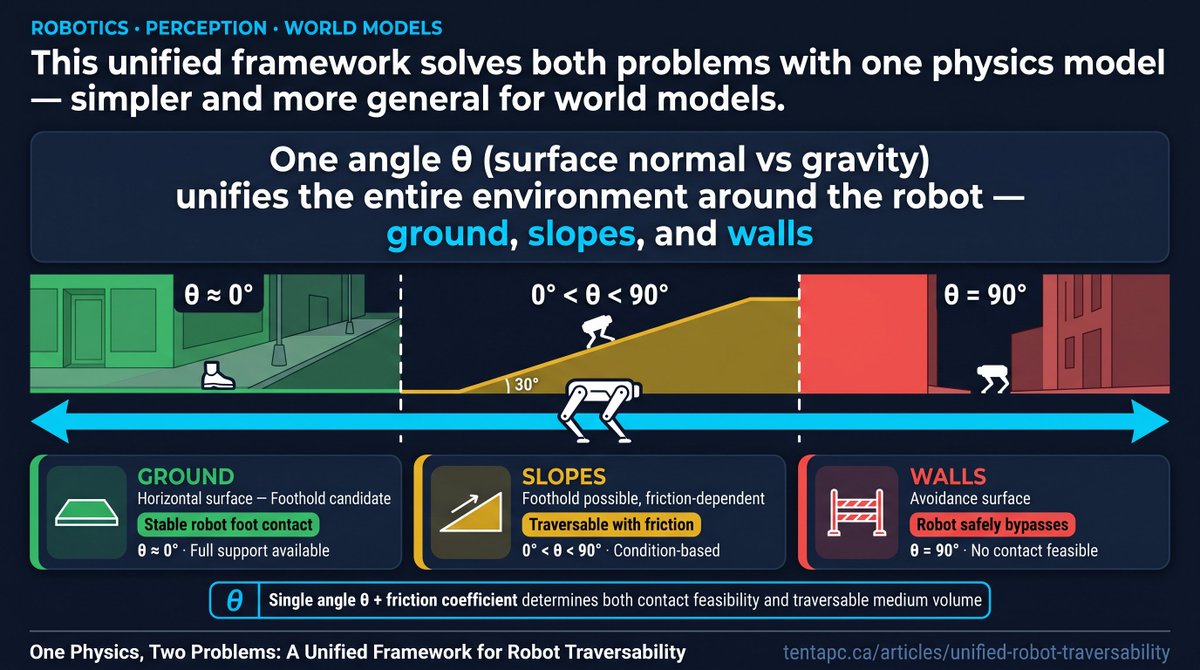
Applying this to robotics: Negative volume represents the traversable medium — the open space that the robot’s body can actually move through, rather than focusing on cataloging endless obstacles.
My unified framework leverages a single physical variable — the angle θ between surface normal and gravity vector (plus friction coefficient) — to simultaneously determine:
Foothold / contact feasibility, and
Negative volume (body passage constraints).
This medium-centric, physics-grounded approach reduces semantic noise and offers a cleaner prior for building predictive world models in embodied AI and robotics.
This art-inspired shift from ‘obstacle detection’ to ‘negative volume assessment’ provides a more holistic and generalizable representation for robot perception.
25
Traditional robotics is obsessed with the "Figure" (obstacles). This new framework focuses on the "Negative Volume" (the traversable medium).
21
Apr 25
I solved a 100-year-old lighting installation headache with simple subtraction. By shortening the crossbar by a few millimeters, I flipped the physics: instead of holding the light UP, I let the box hold it DOWN. Gravity is now your helper. 🧠🛠️ #Engineering #DIY #Innovation #PhysicsHack #ceilingliht

Electricians — if you often stand on a 10-ft ladder, holding a 50-lb ceiling fixture while trying to install it, your “third hand” solution is finally here! A simple trick that solves this decades-old problem. Demo video drops Monday, April 6 at 10 AM — it shows exactly how you can make and use the “third hand” in under two minutes. Follow this account or reply to this post so you don’t miss it!
Who else hates fighting with heavy fixtures up high?
Tag an electrician or lighting designer who needs this! 👇
#designers
#Electrician #Electrical #CeilingFixture #Tools
1
62
Apr 25
If this "Internal Seating" method simplifies solo installs by 90%, should it become the new industry standard? 📐⚡
0%
Yes, long overdue! 🚀
0%
No, traditional is safer
0%
Code/Safety violation?
0 votes • Final results
1
39
Apr 25
Wait, what am I talking about? Check the demo video right here! x.com/TentapC/status/2048116…
Apr 25
I solved a 100-year-old lighting installation headache with simple subtraction. By shortening the crossbar by a few millimeters, I flipped the physics: instead of holding the light UP, I let the box hold it DOWN. Gravity is now your helper. 🧠🛠️ #Engineering #DIY #Innovation #PhysicsHack #ceilingliht
19
Electricians — if you often stand on a 10-ft ladder, holding a 50-lb ceiling fixture while trying to install it, your “third hand” solution is finally here! A simple trick that solves this decades-old problem. Demo video drops Monday, April 6 at 10 AM — it shows exactly how you can make and use the “third hand” in under two minutes. Follow this account or reply to this post so you don’t miss it!
Who else hates fighting with heavy fixtures up high?
Tag an electrician or lighting designer who needs this! 👇
#designers
#Electrician #Electrical #CeilingFixture #Tools
1
115
Apr 25
It’s finally here! 🎬 I spent some time perfecting the "Subtraction" logic. No more fighting with gravity. Check out the full solution below! 👇
21
Apr 22
Meet Mochi & Choco! 🤖✨
They aren't just cute—they're your little helpers when you can’t get a grip on that furnace air filter at home. 🛠️
This is another lovely animation made by @grok Thanks, Grok!
#MochiAndChoco #HomeMaintenance #HVAC #IndustrialDesign #TentapCreations #StuckFilter #GrokAI
2
49
Apr 21
Unbelievable! @grok created this AI animation for our new product design using just one photo and a simple prompt. 🤯 Good job, Grok! 👏✨
We’re working on the "Baby-Scale" version of our Air Puller tool—smaller, cuter, and just as powerful.
#Grok #AIvideo #ProductDesign #IndustrialDesign #StuckFilter #HomeMaintenance #TechInnovation #TentapCreations
1
84
Apr 16
When AI meets a master director: This is hands-down the best AI-generated ad I’ve seen so far, directed by Jia Zhangke! When AI surpasses reality...
Check it out here: xhslink.com/o/8EMOKRpOjqO
#AI #JiaZhangke #GenerativeAI #CreativeTech #FutureOfFilm
70