
TinyNav: A lightweight, hackable system to guide your robots anywhere. by @dvorak0
Joined April 2025
- Tweets 81
- Following 150
- Followers 48
- Likes 13
26 Photos and videos











Apr 24
Excited to share that TinyNav now has an app! We’re making robot navigation more accessible for everyone. More updates are on the way—stay tuned.
1
3
61
UniflexAI retweeted

Mar 26
Insight 9 SLAM Robustness Test 🎥
We put our AI-native spatial camera through rapid, dynamic movements. Watch the right screen: TinyNav VSLAM trajectory in RVIZ stays perfectly stable. 24G accelerometer & 188° ultra-wide FOV = zero tracking loss.#SLAM #Robotics #EmbodiedAI #VSLAM
1
8
103
7,831
Mar 27
FoundationStereo >> FastFoundationStereo > Retinify
Mar 26

We expected FastFoundationStereo to be close to FoundationStereo. We were wrong.
On Jetson Orin Nano:
- FoundationStereo surprised us — lidar-quality point cloud
- FastFoundationStereo is far worse (yes, it is indeed fast)
- Retinify matches FastFoundationStereo's quality but is faster
Speed: 100ms vs 15ms.
Our fork fixed the 2-stage ONNX export with custom TensorRT plugins → single ONNX/plan.
Repo: github.com/UniflexAI/Fast-Fo…
cc @retinify @bowenwen_me
2
145
Mar 27
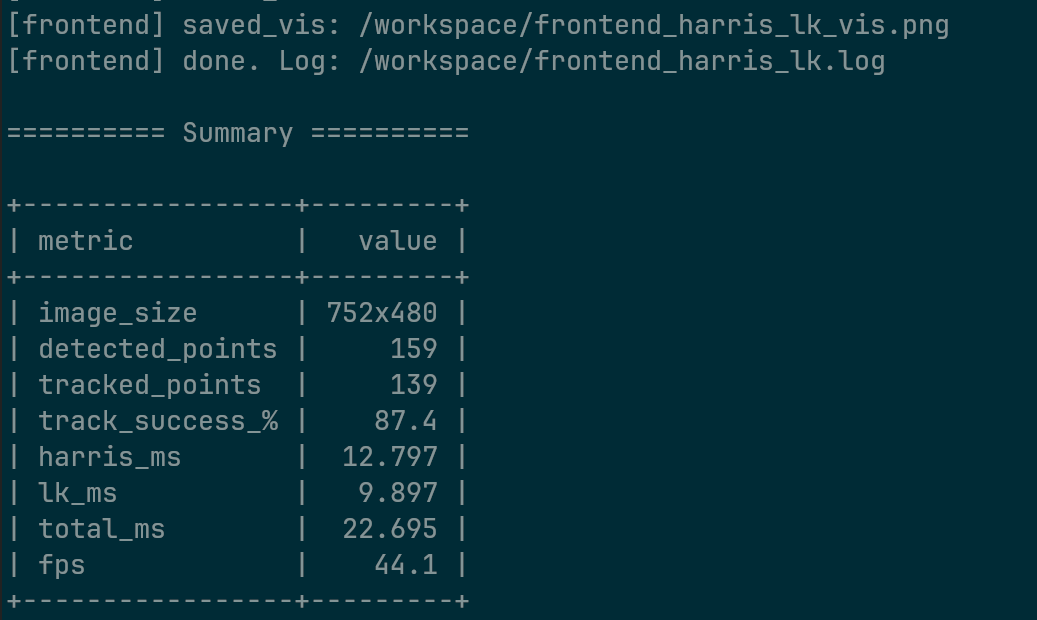
Tuned a faster Harris frontend kernel on an A55 ARM CPU @ 1.5GHz.
For 752×480 EuRoC frames:
• 59.49 ms → 21.51 ms
• 2.77x faster Harris
Same output:
• 159 detected points
• 139 tracked points
Pipeline runtime:
• 68.43 ms → 43.20 ms
2
2
92
Mar 26
We expected FastFoundationStereo to be close to FoundationStereo. We were wrong.
On Jetson Orin Nano:
- FoundationStereo surprised us — lidar-quality point cloud
- FastFoundationStereo is far worse (yes, it is indeed fast)
- Retinify matches FastFoundationStereo's quality but is faster
Speed: 100ms vs 15ms.
Our fork fixed the 2-stage ONNX export with custom TensorRT plugins → single ONNX/plan.
Repo: github.com/UniflexAI/Fast-Fo…
cc @retinify @bowenwen_me
2
2
207
Mar 20
If you know your hardware well enough, you can still write code that's faster than today's AI. I wrote a Harris corner detector kernel that's 2× faster than OpenCV.
2
2
89
Mar 11
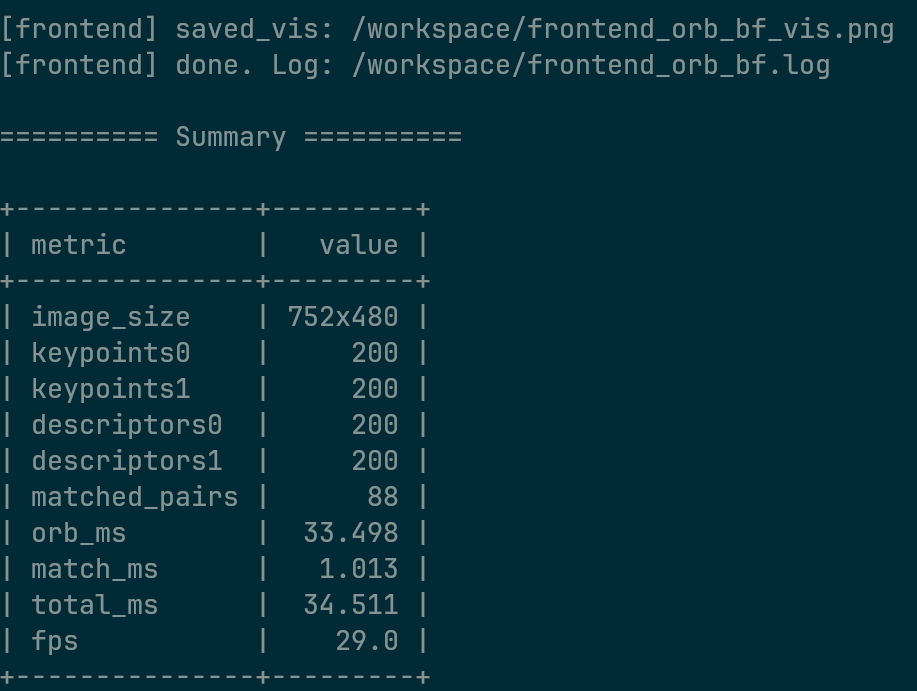
Just updated it to include frontend benchmarks. The first version compares Harris Optical Flow with ORB Hamming matching.
Keep watching: github.com/dvorak0/slambench
You can also easily reproduce the test with:
docker run --rm --cpuset-cpus="0" uniflexai/slambench:latest
3
2
6
116
Mar 10
Thanks for open-sourcing such great models. In our early test, Fast Foundation Stereo reached real-time performance (>13.5 FPS) with max disparity 64 on Jetson Orin NX — honestly much better than we expected.
We’re planning to integrate it into our open-source navigation stack soon:
github.com/UniflexAI/tinynav
Mar 6

🚀Our code is released: github.com/NVlabs/Fast-Found…
Enjoy!
1
2
130
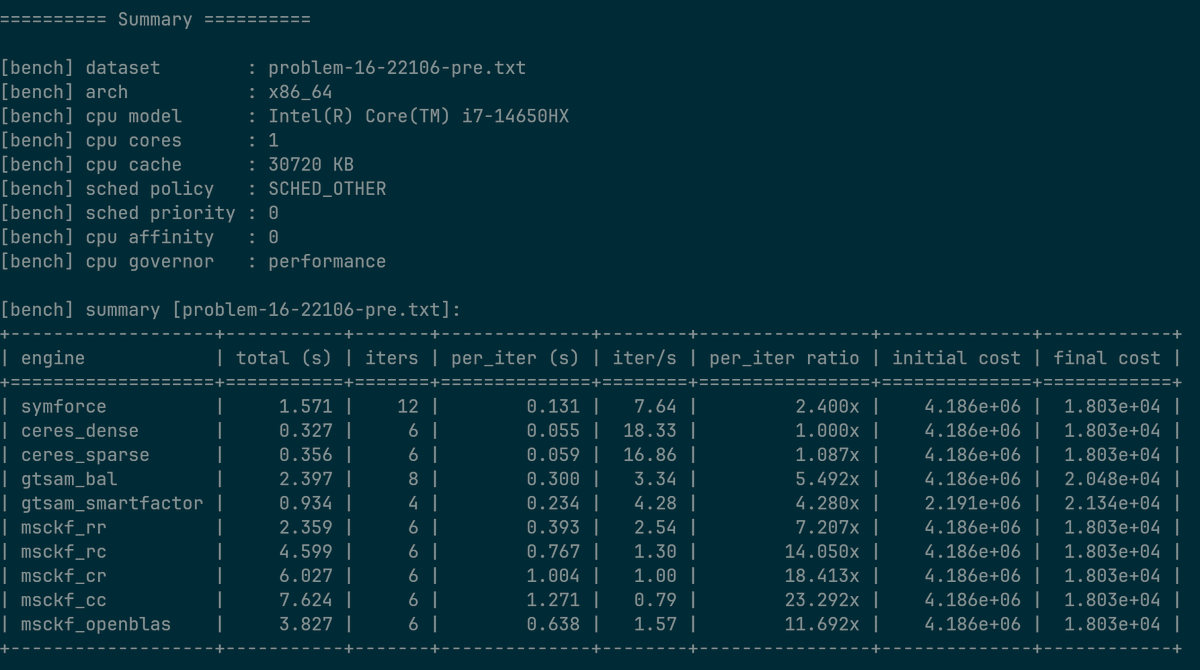
Mar 5
I’ve updated github.com/dvorak0/slambench with more benchmark results, including row-major vs column-major comparisons and GTSAM SmartFactor benchmarks.
Added a summary screenshot below — check it out!
2
4
116
Mar 4
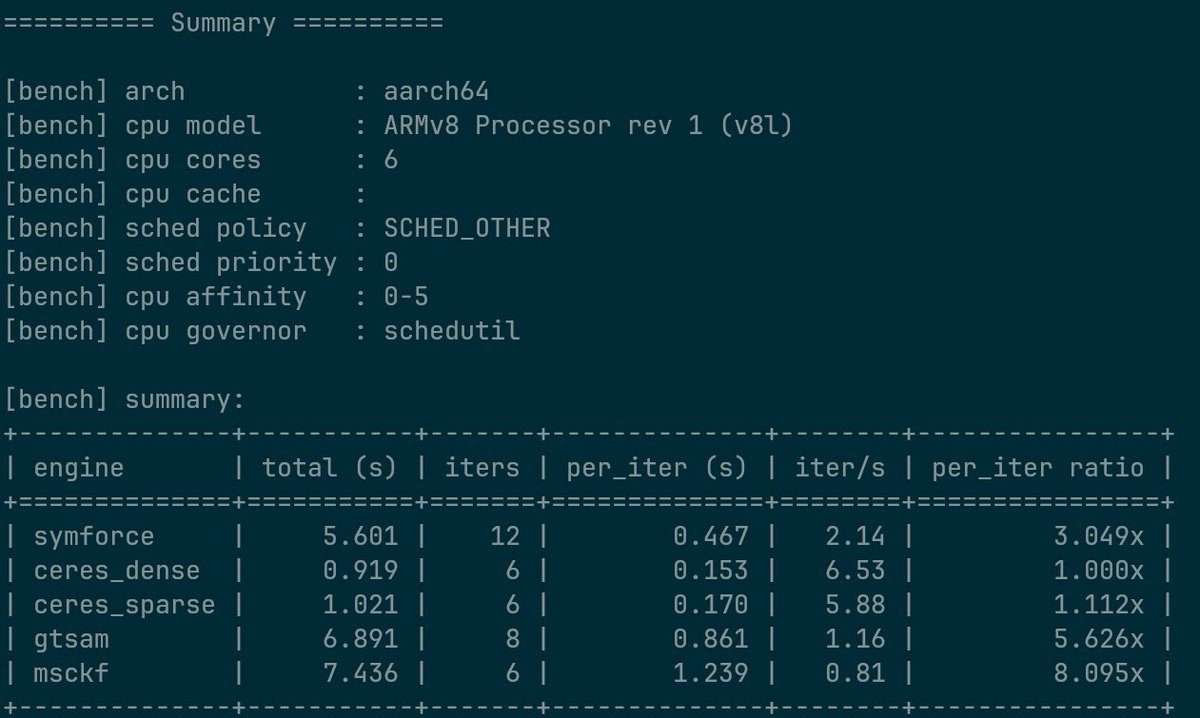
Working on SLAM for years, I’m constantly asked: which method is faster?
So I made a one-line command to benchmark solver speed with the standard dubrovnik/problem-16-22106-pre.txt input:
`docker run --rm uniflexai/slambench:latest`
Run it, share your result, and tell me if anything looks unexpected.
cc @gtsam4 @SkydioHQ @sandwichmaker
1
2
2
111
UniflexAI retweeted
Jan 30
The wait is over. Meet Insight 9👁️
Native Spatial AI. 24g IMU. All packed in a Premium Aluminum Alloy Case.
We are redefining vision for Embodied AI. Coming exclusively to Kickstarter.
#SpatialAI #Robotics #Kickstarter #TechLeak #EmbodiedAI #TechNews #TechTrends
4
10
25
3,175
Jan 29
🚀 Introducing the TinyNav Bounty Program
We’re rewarding the community for contributions that improve navigation, perception, and tooling in physical AI.
🧠 Bug reports
🧩 Code contributions
📝 Docs & tutorials
🎥 Demos & content
Earn rewards while shaping the future of open robotics.
🔗 Details: docs.google.com/spreadsheets…
#TinyNav #Robotics #OpenSource #PhysicalAI
1
1
99

Is it just me or are these robots getting TOO real? 🤖
Caught this @UnitreeRobotics dog zooming past. That new sensor rig looks like giant shades 🕶️. Scary smooth gait.
Is this a secret field test? 🤯🔥 #Robotics #Unitree #TechLeak #FutureIsHere #Spotted

1
3
172
Jan 22
saw completely new design of the head. @UnitreeRobotics is going to navigate the robots using stereo camera, just like our open source project tinynav github.com/UniflexAI/tinynav
Jan 21

WTF is this?? Just saw this robot walking in the park lol. Is this a new Unitree model or what? I’ve never seen this head design before, like it’s wearing futuristic giant sunglasses. Probably some crazy new cameras inside? Anyone know? New leak? #Robotics #Unitree #TechLeak

1
1
69
18 Dec 2025
Excited to share a video about the workflow of our project!
From zero to navigation with TinyNav 🗺️➡️🤖
1️⃣ Build a map
2️⃣ Add POIs in the editor
3️⃣ Let your robots navigate, correctly react to obstacles, and find feasible paths
Keep an eye on TinyNav — a ~3,000-line open-source navigation stack for multiple robot platforms 🚀
We’ve added a remote interface using @foxglove — an amazing tool. Thanks, Foxglove 🙌 #Robot #Unitree #navigation
2
71
17 Dec 2025
We need re-consider our stereo model! I will report the difference soon in our project.
17 Dec 2025
A new milestone for real-time accurate 3D spatial computing! Introducing ⚡️Fast-FoundationStereo⚡️, a real-time zero-shot stereo depth estimation model that accelerates the original FoundationStereo by >10x with comparable quality.
Details in threads 🧵 (1/N)
1
3
329
27 Nov 2025
Cool! New player in the room.
16 Oct 2025

Today we’re thrilled to announce #SharpaWave — our first dexterous robotic hand — now officially in mass production and delivery!
Robotic dexterity just took a leap forward.
#Sharpa #Robotics #AI #DexterousHand #Robot #Humanoid #TactileSensing
1
1
102