
Building Human-embodied Intelligence. CEO @MyoLabAI | Sr. research scientist @OpenAI @GoogleAI @AIatMeta | @berkeley_ai @UWcse #MuJoCo | Ad. Prof. @CMU_Robotic
Joined February 2016
- Tweets 1,873
- Following 877
- Followers 6,537
- Likes 3,652
341 Photos and videos










Pinned Tweet

23 Jun 2025
📢Life is a sequence of bets – and I’ve picked my next: @MyolabAI
It’s incredibly ambitious, comes with high risk, & carries unbounded potential. But it’s a version of the #future I deeply believe in.
I believe:
➡️AI will align strongly with humanity - coz it maximizes its own growth & impact
➡️It will transform the world as profoundly as the internet
➡️Like the internet, it will ultimately disappear into the background of our daily lives
Most of what we see today are transient wins - short-term products riding the first waves of capability. Not transients, I’m betting on the signals that will endure.
Just as the cellphone became the personal gateway to the internet era, I believe the future of AI will be 𝐩𝐞𝐫𝐬𝐨𝐧𝐚𝐥𝐢𝐳𝐞𝐝, 𝐜𝐞𝐧𝐭𝐫𝐚𝐥𝐢𝐳𝐞𝐝, & 𝐝𝐞𝐞𝐩𝐥𝐲 𝐡𝐮𝐦𝐚𝐧-𝐜𝐞𝐧𝐭𝐫𝐢𝐜. The interface—the #canvas—of this era is still waiting to be defined.
With MyoLab, I’m placing my bet on the 𝐥𝐢𝐟𝐞𝐥𝐢𝐤𝐞 𝐡𝐮𝐦𝐚𝐧 𝐝𝐢𝐠𝐢𝐭𝐚𝐥 𝐭𝐰𝐢𝐧 as that interface.
We’ve assembled a world-class team with the conviction and grit to make this future real. We’re building a new kind of AI: embodied, personal, and lifelike. Most already believe lifelike digital twins are inevitable. We’re just accelerating the timeline.
Today, we’re releasing an early research preview of the first instantiation of #HumanEmbodiedIntelligence at myolab.ai
We’d love for you to try it and share your feedback.
𝐓𝐡𝐢𝐬 𝐢𝐬 𝐦𝐲 𝐛𝐞𝐭. 𝐖𝐡𝐚𝐭’𝐬 𝐲𝐨𝐮𝐫𝐬?

All forms of intelligence co-emerged with a body, except AI
We're building a #future where AI evolves as your lifelike digital twin to assist your needs across health, sports, daily life, creativity, & beyond...
myolab.ai ➡️ Preview your first #HumanEmbodiedAI
20
20
116
29,555

#RSS2026 Workshop on Whole-Body Control & Bimanual Manipulation: Applications in Humanoids & Beyond 🤖👽🦾
Deadline extended & speaker updated!
You now have until Jun 15 (a week after ICRA/CVPR) to submit :D look forward to your work!
wcbm-workshop.github.io
@RoboticsSciSys
1
14
107
8,960
Vikash Kumar retweeted

Jun 6
w/ Satoshi, @IMordatch , @coolboi95 (founding engineer at Generalist), Michael, Luke Metz, Dan Freeman, originally w @Vikashplus. great memories from back in research days at Google Brain Robotics.
Real robot link: sites.google.com/view/u-shap…
Sim link: sites.google.com/view/learni…
2
13
3,589
Jun 2
Robotics is community built on critical fundamentals like these - analytical IK for arms.

Fifteen years ago, I had the privilege of working with Rosen Diankov at CMU on his PhD thesis. The capstone was IKFast — for a generation of roboticists, the definition of what analytical inverse kinematics could be.
Today, I'm excited to release the next chapter: ssik.
1/
1
6
1,228
Jun 2
Shout out to a new pre-trained vision model for robotics that comes close to and outperforms prev works from our group - R3M (w @SurajNair_1), VIP(w @JasonMa2020), VC1 (w @aravindr93), etc.

Are you still running your robot policies on vision encoders trained purely on static images?
Nowadays, the standard practice in robot learning is to plug in powerful vision models like CLIP, SigLIP, or DINOv2. This inherits a quiet, convenient assumption: “Let mainstream computer vision handle perception, and the downstream policy will figure out the dynamics.”
But let’s be real for a moment. Is this truly the best we can do?
We introduce DynaFLIP: Rethinking Robotics Perception via Tri-Modal-Dynamics Guided Representation.⬇️
🔷 Dynamics upstream: we push motion understanding into perception.
🔷 Tri-modal-dynamics supervision: image transitions × language × 3D flow, fused via simplex-volume alignment (260K trajectories from robot & human video)
🔷 Transfers everywhere: a visual backbone for diverse policies (MLP, Diffusion Policy, VLA)
🔷 22.5% over the strongest baseline (DINOv2, SigLIP) under real-world OOD
🔷 Open-Source & easy to use
🌐 Website: dynaflip-robotics.github.io
📄 Paper: arxiv.org/abs/2605.30350
💻 Code: github.com/JU-SUK/DynaFLIP
🤗 Hugging Face: huggingface.co/jlee-larr/dyn…
1
2
31
4,719
May 27
Main criticism with simulations are their difficulty gap in capturing real world diversity. Progress in Generative simulations speeding up fast 💪
The focus needs to move from photorealism to physics & forces -- the language of physical world.
May 27

We are back again :) After three weeks of quiet building.
Introducing Genesis World 1.0, our latest simulation platform, the second release in our full-stack suite. Open-sourced.
Robotics is still bottlenecked by the 1× speed of the physical world. Every model, checkpoint, and data recipe eventually needs to be tested on physical hardware, slowly, expensively, and with limited coverage.
One hour in reality can become 100 days in simulation. That is how robotics model iteration moves from a wall-clock bottleneck to a compute problem.
To make this work, simulation has to be both fast and trustworthy.
Over the past year, we rebuilt the entire stack: a GPU-accelerated cross-platform compiler, penetration-free multi-physics contact solvers, unified rigid and deformable physics, and a photo-realistic renderer purpose-built for physical AI applications.
We built Nyx, a high-performance path-traced rendering engine for robotics application.
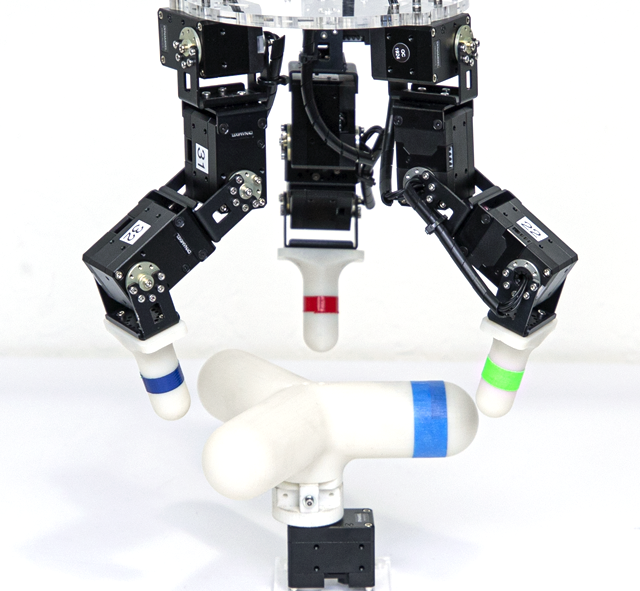
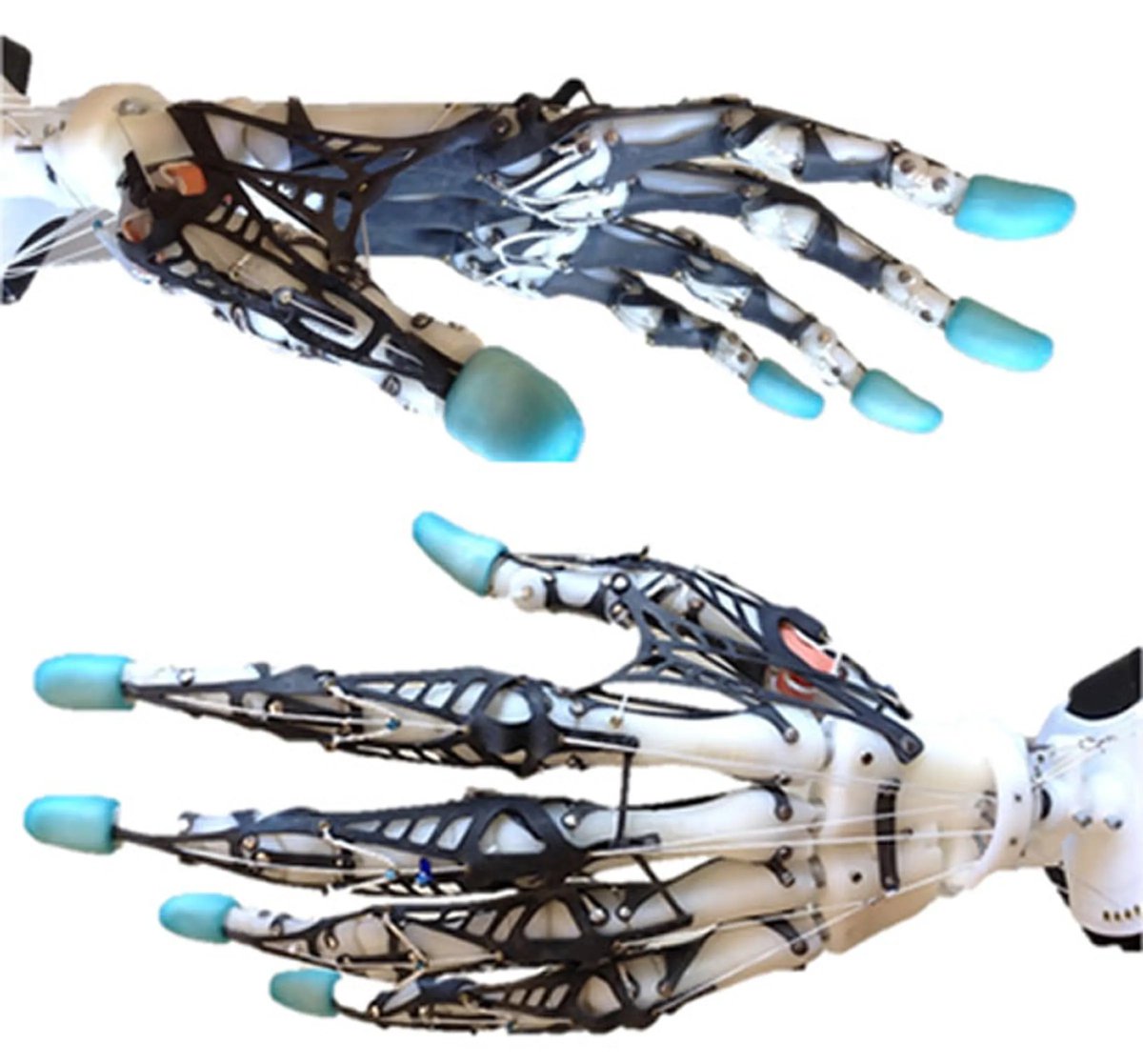
Genesis World 1.0 achieves near realtime performance with our latest development for penetration-free IPC solver, supporting various types of deformables beyond rigid bodies. It supports contact-rich, dexterous manipulation simulation across different embodiments: unitree, sharpa, wuji, genesis hand and various types of grippers.
Under the hood is Quadrants, our effort in pushing forward cross-platform GPU-accelerated computation. Quadrants started as a fork of Taichi, and we rebuilt most of the critical parts for optimizing simulation workloads, giving 10x faster launch time and up to 4.6x runtime performance compared to the initial Genesis release.
Together, they bring us to an unprecedentedly low sim-to-real gap, enabling zero-shot real-to-sim model evaluation and much faster iteration of GENE.
All available today.
Genesis World 1.0: github.com/Genesis-Embodied-…
Quadrants: github.com/Genesis-Embodied-…
Nyx: github.com/Genesis-Embodied-…
4
695

Today, Human Archive is announcing our $8.2M seed round to model human embodied intelligence.
Despite decades of research, we still barely understand ourselves. Our goal is to learn how humans interact with the world, and over the past 6 months, our team’s made enormous progress toward that alongside leading AI labs.
learn more @TechCrunch
techcrunch.com/2026/05/26/hu…
51
25
235
66,386
May 25
Race for humanoids continues where 4 bars and 2 wheels can be equally effective!!

This is evoBOT, a robot helper developed by Germany’s Fraunhofer Institute for Material Flow and Logistics.
It can grasp and carry goods to support cargo workers in transporting packages.
evoBOT can also move smoothly across uneven terrain, including bumpy surfaces and sloping ground.
1
3
1,143
May 20
A great reminder that -
robot learning = data algo scale
May 19

Spent last week benchmarking policy speedup methods. Then we just collected faster data and it beat all baselines...
Although obvious, but turns out first step to speed up your policy is … collect faster data.
3
28
3,789
May 20
✈️In ☀️California (until Friday)
Hit me up if you would like to meet. DMs open.
7
1,022
Vikash Kumar retweeted
May 19
SCALING ISN’T EVERYTHING
Another tiny model breaking the rule.
-trained on less than 1/1000th of the data
- can be trained in a single day with <1000 USD
Human knowledge base ca be compressed & retrieved much tighter than LLMs do today.
May 18

Introducing HRM-Text.
An ultra-lean 1B-parameter reasoning language model designed to deliver strong general performance with a fraction of the data, compute, and infrastructure.
Trained on just 40B structured tokens, HRM-Text achieves competitive performance while using ~1/1000 of the training data of comparable models.
The kicker? The full model trains in roughly one day on a $1,000 budget.
This opens the door to a new generation of AI that is powerful, accessible, and radically easier to adapt. Theories and research concepts once deemed too expensive to test are officially back in the game.
Sapient Intelligence invites you to help us shape a new paradigm for general intelligence.
4
5
81
11,361
May 19
Whole body controllers - effective with contact rich behaviors - are the unsung HEROs of robotics🦸♂️
Without them all we will have - is a bunch of over powerful pincers picking & placing tiny objects on the table.
(a bit harsh but true)
May 18

You can’t lift a fridge with just your hands. Your whole body needs to conform to its shape, and bear the load between your arms and torso.
Here, @BostonDynamics' Atlas uses proprioception to manage the whole-body interaction and adapt to a shifting 100 lb load. Enabling this type of high performance manipulation is exactly why we walked away from what was arguably the world’s best implementation of MPC for humanoids, and shifted entirely to RL without looking back.
This level of whole-body controls is a fundamental building block of physical intelligence and key to the value proposition of humanoids.
More technical details in:
Blog: bostondynamics.com/blog/trai…
Behind the scenes video: youtu.be/xKK5ze3FukQ
2
3
11
2,953
May 19
text2motion often struggles from physically inconsistent motion. However, the whole body controllers for G1 has gotten so robust that it’s finally becoming possible to connect the two.
Next frontier - task driven contextual motion generation & real time execution - can provide a great interface for training robots on the job.
May 19

Voice‑driven, real‑time arbitrary action generation😁
Using external voice commands, G1 is directly controlled to generate a wide range of actions in real time.
This video was recorded in a single take, with on‑site audio recording.
Because the actions are autonomously generated by AI in real time, there may be slight latency, and the smoothness of the movements may be somewhat reduced.
1
3
15
2,656
May 18
Beautiful analogy of current AI to human brains by @karpathy
“Sleep is like distillation of long context into (brain) neural weights with synthetic data generation” and many more 👊
2
463
May 18
Head to head comparison with the human in real task is one of the greatest
- way to demo robotics
- way to kill the skeptics
- marketing stunts 🤪
@Figure_robot is raising the bar high 💪
May 18

Congrats to Aime!! He said his left forearm is basically broken 😂
Final scores:
→ F.03: 12,732 packages (2.83 seconds/package)
→ Aime: 12,924 packages (2.79 seconds/package)
This is the last time a human will ever win
4
14
1,420
May 15
Deployment data will be critical to mature robotics out of labs/ demo,
Strategic alignment between Mind- @Rivian yields them a strong positioning
@Tesla_Optimus-@Tesla also has such alignments.
@agilityrobotics should also have large deployment datasets. @chris_j_paxton?

Mind has raised an additional $400M, bringing our total funding to over $1 billion. We are building dexterous, general-purpose robots and foundation models for industrial deployment, starting with the automotive industry. I’m super excited and grateful to be working on these problems with such a stellar team.
We are uniquely positioned to tackle the general-purpose robotics problem given our deep partnership with @Rivian, who is a shareholder and our pilot customer, and who is also providing us with data from production lines to add to our training mixture.
It’s still super early days, and we’re hiring across research, software, hardware, and more! (Link below)
2
14
2,834
May 14
This is incredibly impressive. Such uninterrupted live demos should be the standard. Kudos @adcock_brett and team.
Additional shout out to @agilityrobotics for setting such standards.
May 14
Day 2 is Live: Watch humanoid robots Bob, Frank, and Gary running 24/7. This is fully autonomous running Helix-02 x.com/i/broadcasts/1AxRnakog…
2
5
52
4,982
May 14
Now that’s banger of a co-dev partnership. Each party wants the other to succeed for their own success.
💪@TheHumanoidAI
May 13

Big announcement for Humanoid: we’ve secured a landmark deal with @SchaefflerGroup to deploy thousands of humanoid robots.
Humanoid has signed a binding, phased deployment with Schaeffler, a leading Motion Technology Company, to integrate humanoid robots directly into live manufacturing operations. The first systems go live in Germany before the end of 2026.
The agreement is structured around a Robot-as-a-Service (RaaS) model. Under this model, Humanoid provides the robotic systems together with the related services required for end-to-end deployment and operation, including connection to the fleet management software, maintenance, 24/7 technical support, updates, and ongoing performance management.
In addition to the deployment contract, Humanoid has also signed a 5-year supply agreement with Schaeffler for supply of actuators.
More details here: thehumanoid.ai/humanoid-secu…
3
6
2,184
May 13
The gap between “demo” and “deployment” is NOT called “sim2real”❌
My mom already thinks Optimus prime is real. These hot takes and social media shit storms isn’t helping.
May 13

Hot take: most people who say "humanoid robots are 5 years away" are looking at the wrong bottleneck. It's not hardware. It's not compute. It's generalization!
The demo problem: Every impressive robot video you've seen was recorded in a controlled environment. The robot knows the room. It knows the objects. The lighting is set. The task is narrowly defined. That's not a failure, it's just not real-world deployment.
The gap between "impressive demo" and "ships to customers" in robotics is called sim-to-real transfer. Training in simulation is cheap and fast. Making that training hold up in the messy physical world is hard. This is the actual frontier right now.
What IS real progress (not hype):
→ Foundation models for action (RT-2, π0, similar) are genuinely changing what's possible
→ Hardware costs dropping dramatically (motors, sensors, compute)
→ Data flywheels are starting to spin
These three converging = the inflection I'm watching closely.
My actual timeline estimate:
- 2026–2027: Commercial deployment in controlled factory environments at scale
- 2027–2029: Semi-structured environments (warehouses, care facilities)
- 2029 : Generalized home/consumer robotics
Anyone who's more aggressive than this hasn't spent time on sim-to-real.
#ai #robotics #autonomousdriving #humanoidrobot
3
1
12
2,670
May 13
What really frustrates me is how wrong these references are to the actual definitions of world models (including — pure world model)
It evident that *anything* that predicts *anything* about the world is today is casually termed as a world model ❌

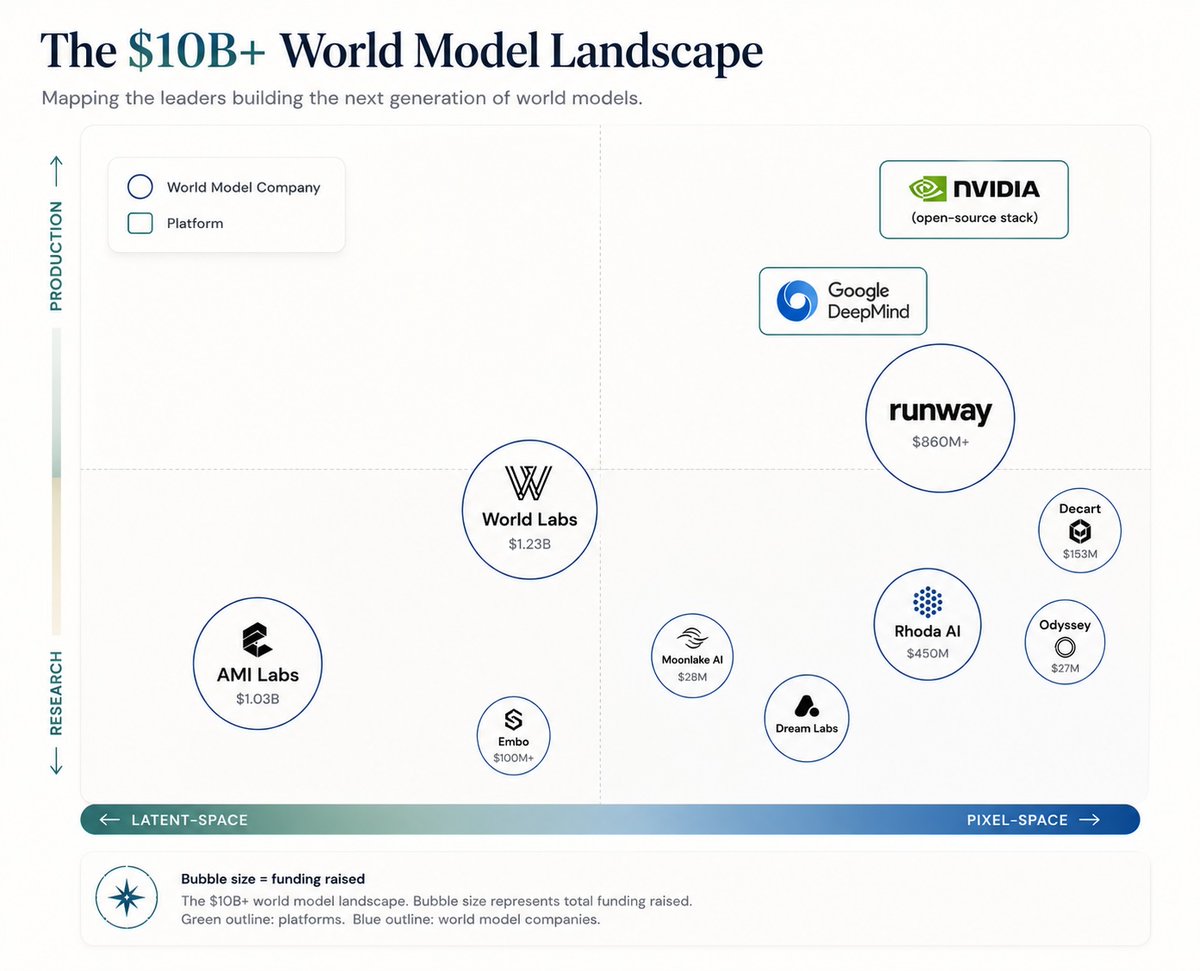
This is the single best read on World Models and one of the most important reads in AI.
$10B has flowed into "world models" in the last 18mos, from Yann LeCun to FeiFei Li. The promise is, like LLMs, world models will provide the data it takes to scale robotics foundation models, and solve robotics.
..but the word has been abused to mean one of many things.
This post unpacks:
– What 5 traits makes a world model?
– How do the different approaches stack up?
– What is it used for within and beyond robotics?
– Where is the opportunity?
– Citations to research, news and blog posts
Companies / products in the space include:
– BigCo products: Google Genie, Tesla Optimus, Nvidia DreamDojo, DreamZero, Microsoft Muse
– Pure world model: AMI Labs, World Labs, Runway, Rhoda, Decart, Spaitial, Odyssey, Embo, Dream Labs, OneWorld
– Robot foundation model cos: Skild, Physical Intelligence, Figure, Mind
Very likely one of the seminal technologies of the next decade.
14
2,292