
Golf coach, PhD in Biomed | Geeks out on science, tech and sport performance
Joined August 2025
- Tweets 162
- Following 107
- Followers 29
- Likes 157
22 Photos and videos










Aiming well is a consequence - not the root cause.
I’ve never seen a slicer with an issue aiming too far right…
Perception is highly powerful and overrides a lot of what we ‘consciously think’ we’re doing - such as aiming at our target.
May 20

Aiming well remains the most underrated skill.
Hit this great but was a little peeved it went a little right. Thought I was aiming straight at the pin and blocked it a little
Turns out it went exactly where I was aiming 🤣
53
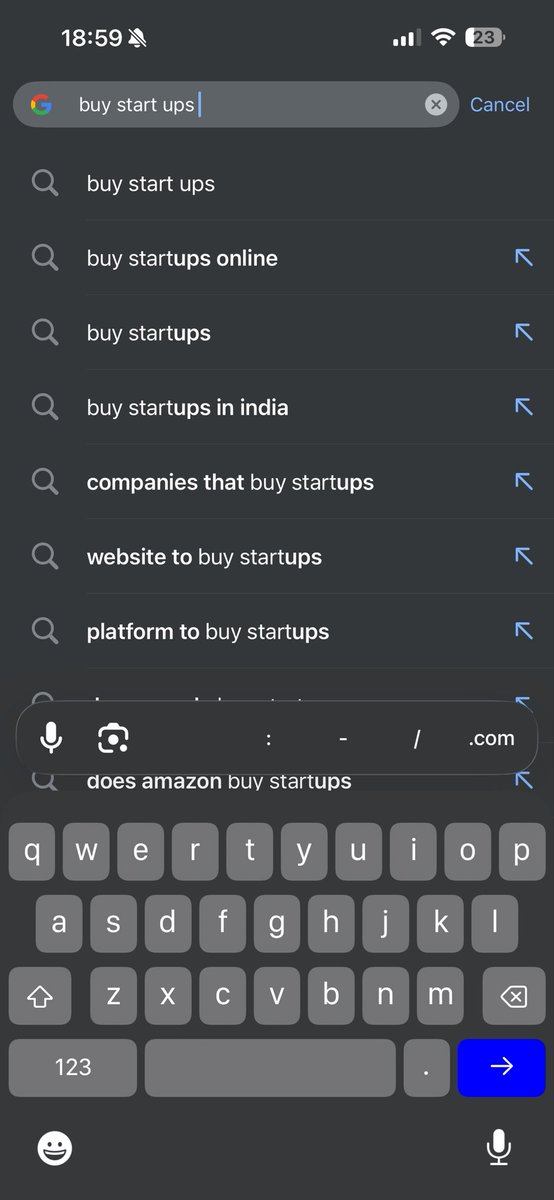
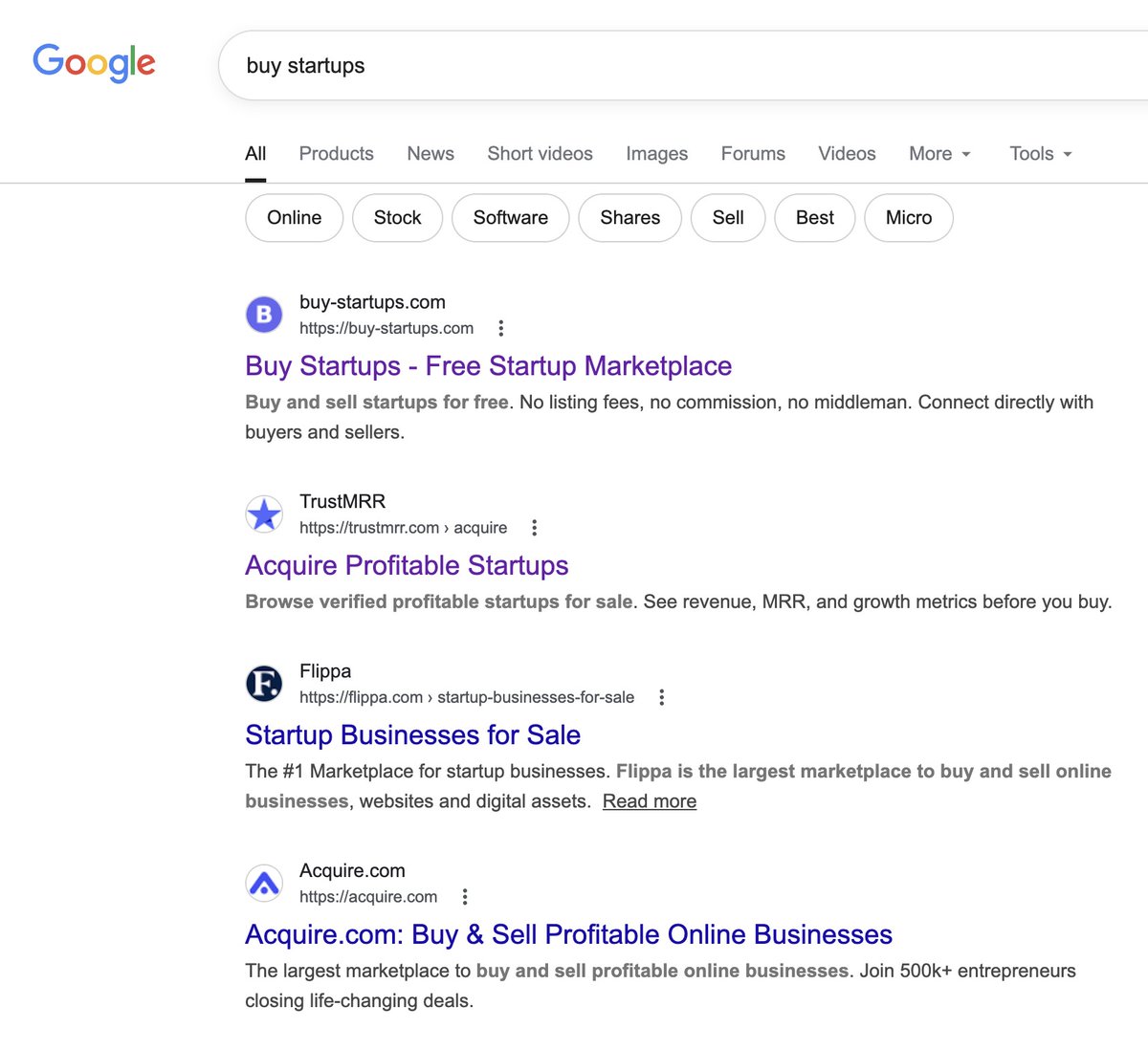
Lots of ppl asking @marclou how to do SEO. Feel free2save
1) pick a super niche word in your area. Not ‘buy startups’ instead ‘buy golf start ups’
2) type that into Google - what ranks, type of page, length, sub headings?
3) build a page with exact title & cover same topics👇

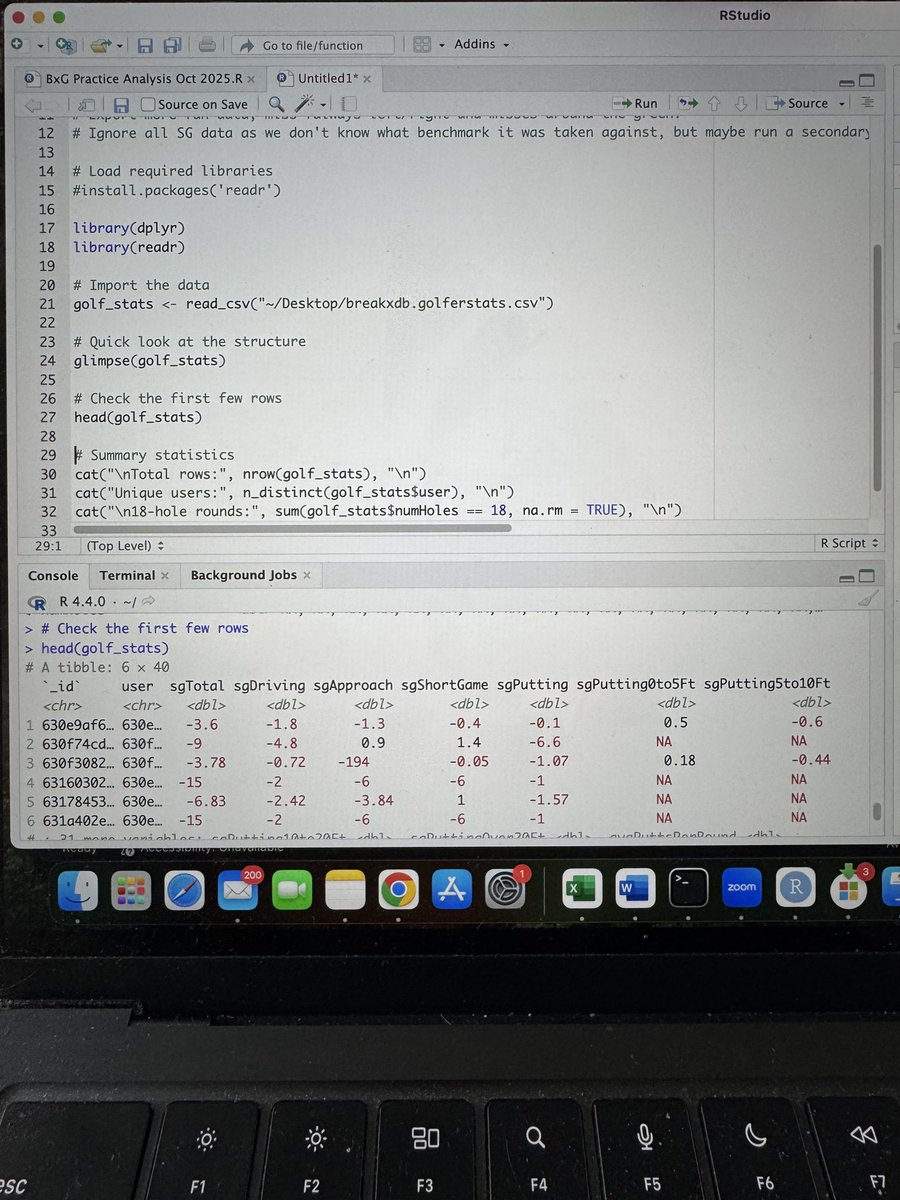
My vibe-coded startup marketplace now ranks higher than top guns for top SEO keywords 😇
1
1
65
Once you can rank top 3 for a super easy word pick a slightly tougher term in the same topic - the same principles apply.
Then match on page content with thinking - what would be an amazing result for someone searching this topic?
Combine that with content you need to rank
1
1
20
Never follow a bad golf shot with a stupid one.
Mar 25

What is the best golf advice tip you've ever received in your life? (I need some lol).
58
Great share. This is niche!
Makes me think, what’s the nichest successful app or product you’ve come across in golf?
Mar 25
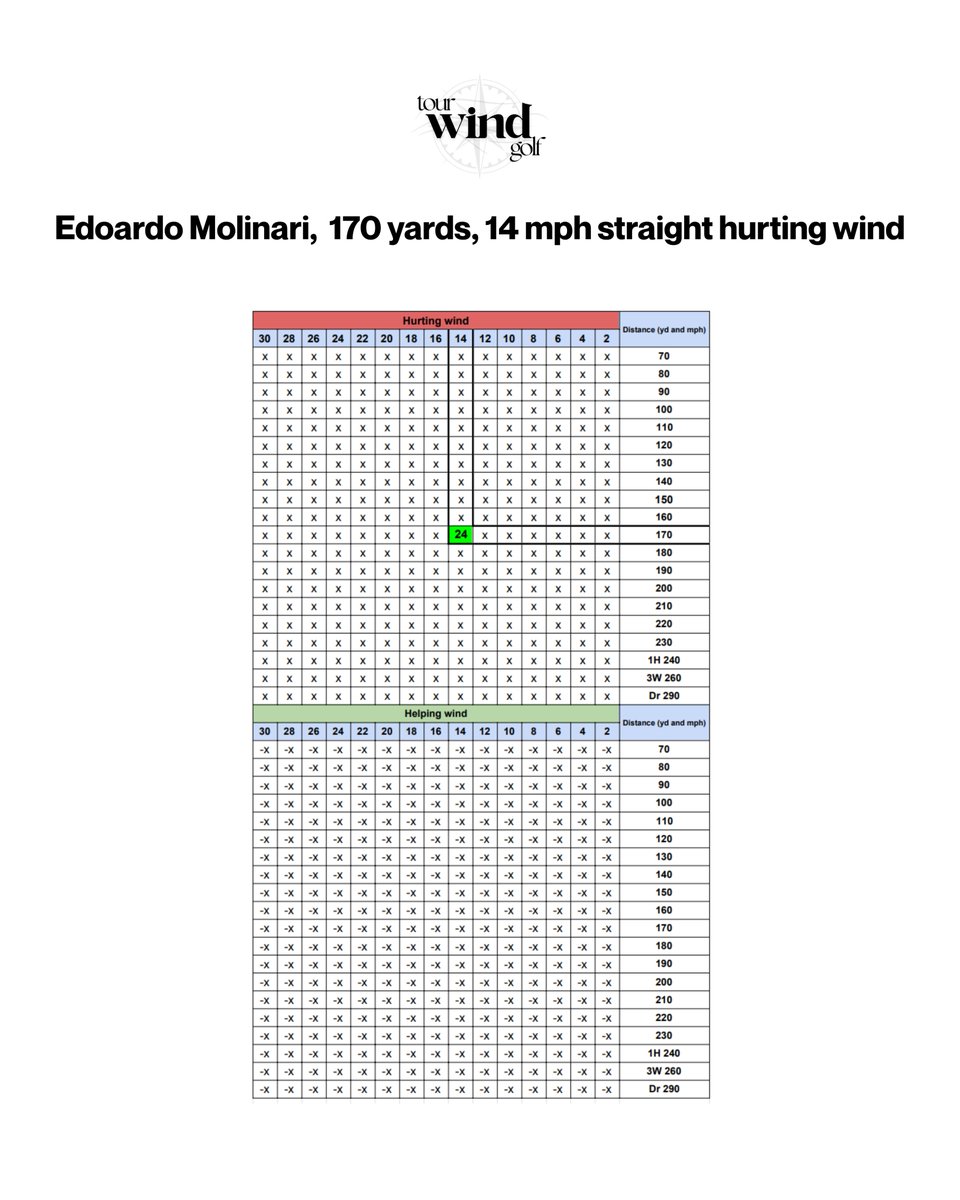
I love that Edoardo Molinari is casually living in the year 2036
Calculates exact hurt/help yardage impacts from various distances at different wind speeds
24 yards of hurt in this 170 yard/14 mph example.
(Rest is X'd out because don't want to give away too many secrets)
1
69
One thread I’ve commonly seen is this:
The kind of golf that you need to play to get on the main tour from mini tours is different to the type of golf you need to succeed on tour.
Flicking it round fiddly courses in -8 is different to carding three 69s on a tour course
Mar 24

Having the capacity to shoot in the low 60s anywhere you show up but to also not be anywhere near the tour is an incredible thing in pro golf… there are SO MANY dudes who could win who never sniff the PGA Tour
58
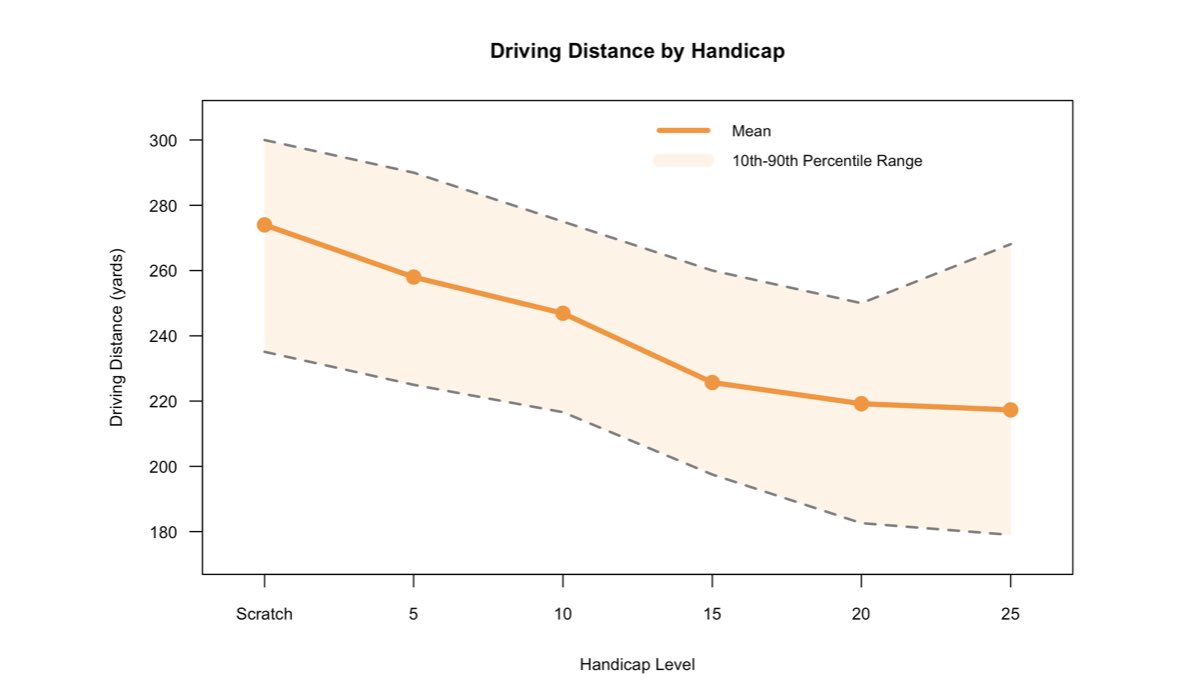
Same in modelling golf biomechanics.
Everyone wants to know ‘what are my numbers’
But modelling the pelvis, thorax and arms is so challenging b4 test - retest reliability.
Then we have estimating joint centres…
Without a good estimation of these, the numbers are garbage…
Mar 17

A physical limitation w/ golf robots is simulating the human wrist.
Humans vary their use of tiny hand muscles and wrist rotation. Robots clamp the grip firmly.
It's a decent approximation, but an imperfect simulation of shaft loading, closure rate, and impact variation.
1
75
Skills games:
☑️ Make them relevant to the skill
☑️ Suitably challenging
☑️ Set a goal
☑️ Track your scores
☑️ Genuinely care what you score
The last one is the toughest.
Just give me a shout if you need any ideas for how to practice a certain skill in golf.
⛳️

It’s well worth asking yourself how good your practice is?
Practicing really really well is a skill in itself.
My main advice is to be engaged and focus on “quality over quantity”.
It’s really easy to “switch off” when practicing and more or less making it pointless.
1
1
258
Fixing your golf swing because ‘something doesn’t look right…’
One of the best ways to practice and get worse…
Mar 10

You don't need a flat lead wrist at the top of the backswing, especially with a neutral/strong grip. If you're cupped at setup you can be slightly cupped at the top and be just fine. Golfers trying to get flat lead wrists often create more problems for themselves than they solve.
1
2
290
Love this @mfinneygolf.
Great explainer and you’re spot on.
One more point that might be of use. When I was a ‘helper’ for Mr McIlroy & Mr Westwoods biomechanics at Leeds Met Uni we saw this.
As both approach impact the linear velocity of the hosel decreased into impact…👇
Feb 24

We could handle this on a podcast - you and me. We could handle it with four of us - you, me, Jacobs, and Como. We could handle it with six of us - add in Nesbit and MacKenzie.
But you won’t. Why?
Why, Brian?
1
1
515
It’s tricky to understand forces because they are unseen but acceleration, inertia and understanding motion about the CoM are key to really understanding golf swing mechanics for us coaches.
Ps - another big shoutout to Sasho. He’s always so generous with his time & responses.
1
52