
PhD student in robotic manipulation @UGent 🇧🇪 | Looking for 🤖 that don't require cages or meticulously orchestrated environments
Joined March 2020
- Tweets 91
- Following 297
- Followers 67
- Likes 875
5 Photos and videos


Thomas Lips retweeted

30 Jul 2025
Because AI is an engineering discipline and not a scientific field, it's never possible to fully separate the properties of a given approach from those of its specific implementations. The artifact is the method.
53
126
965
69,271
Thomas Lips retweeted

9 Jul 2025
TRI's latest Large Behavior Model (LBM) paper landed on arxiv last night! Check out our project website: toyotaresearchinstitute.gith…
One of our main goals for this paper was to put out a very careful and thorough study on the topic to help people understand the state of the technology, and to share a lot of details for how we're achieving it.
youtube.com/watch?v=BEXFnru5…
8
105
488
88,048

14 Jun 2025
Totally agree!
TRI is currently the gold standard in robotic manipulation research imo
Highly recommend watching this talk
14 Jun 2025

Amid all the noise and rapid pace in the field, I really appreciated Russ Tedrake’s talk on their LBM work and the rigorous evaluations that go beyond flashy demos—some papers these days don’t even include error bars. The talk offered valuable insights on avoiding reinvention. Highly recommend everyone to watch the lecture.
FYI: This is easily one of the most impressive demos I’ve ever seen.
youtube.com/watch?v=TN1M6vg4…
4
293
Thomas Lips retweeted

14 Jun 2025
Amid all the noise and rapid pace in the field, I really appreciated Russ Tedrake’s talk on their LBM work and the rigorous evaluations that go beyond flashy demos—some papers these days don’t even include error bars. The talk offered valuable insights on avoiding reinvention. Highly recommend everyone to watch the lecture.
FYI: This is easily one of the most impressive demos I’ve ever seen.
youtube.com/watch?v=TN1M6vg4…
3
16
131
9,869
Thomas Lips retweeted

12 Jun 2025
A new chapter in robotics is about to begin. 🤖
The next generation of 4NE1—our cognitive humanoid robot—is ready and we're bringing it to the stage at automatica 2025 in Munich.
📍 Hall B4, Booth 319
🕑 Tuesday, June 24, at 11 AM
This is an event you won't want to miss!

11
34
204
20,075
Thomas Lips retweeted

10 Jun 2025
wrote a new post, the gentle singularity.
realized it may be the last one like this i write with no AI help at all.
(proud to have written "From a relativistic perspective, the singularity happens bit by bit, and the merge happens slowly" the old-fashioned way)
780
852
10,865
2,178,423
11 Jun 2025
I will be presenting our work on using text-to-image diffusion models for synthetic data generation at the #CVPR2025 syndata4CV workshop later today
Feel free to come to our poster if you want to chat about synthetic data!
( poster #229, 1 pm)
1
3
202
25 Apr 2025
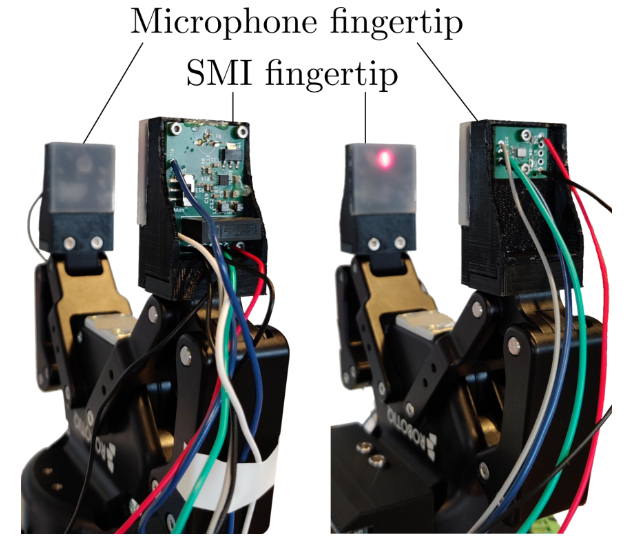
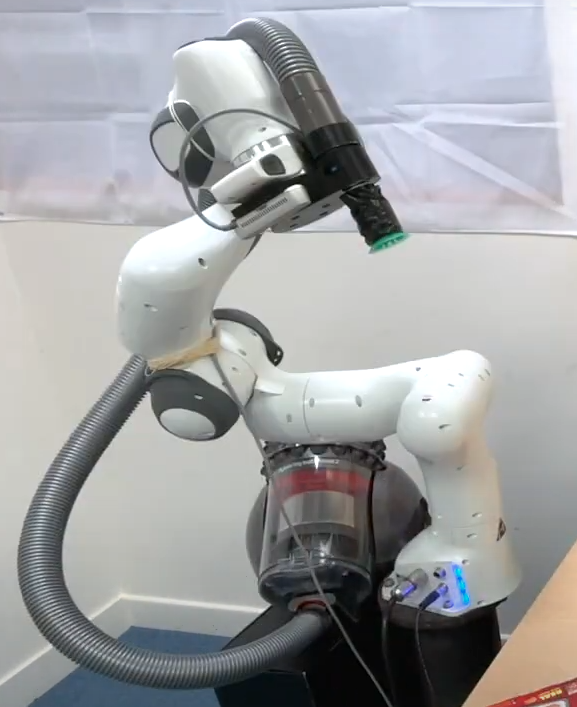
New paper with @_robot_feels
Microphones improve robot manipulation, but are sensitive to ambient sound.
We explore a Self-mixing Intereferometry (SMI) sensor as an alternative.
Results:
✅ SMI is less sensitive to ambient sound
❌ but suffers more from motor noise
1
1
81
25 Apr 2025
Paper: arxiv.org/pdf/2504.13711
We will also present this at the #ICRA2025 RoboAccoustics workshop. Come talk to us if you are interested!
Work done under supervision of @fwyffels at @IDLabResearch
1
1
127
Thomas Lips retweeted

19 Feb 2025
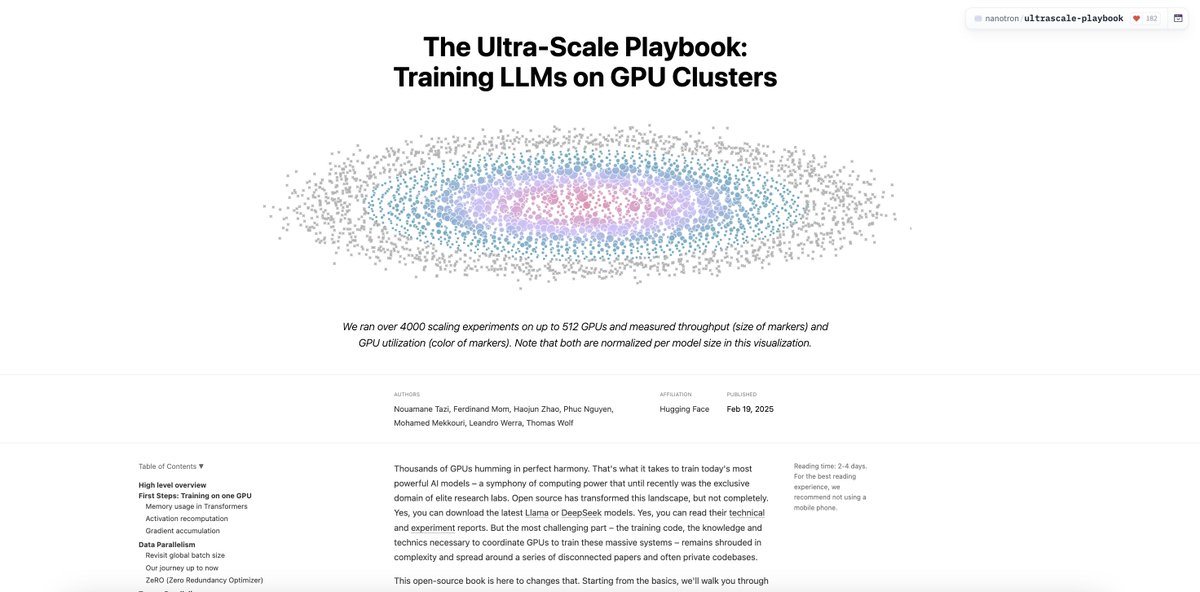
I'd like to live in a world where all countries & organizations, big or small, can train their own AI, instead of just a few of the richest & biggest ones. This is IMO one of the most important topics ever and will shape the future of the world.
That's why I'm super proud when we release things like the ultra-scale playbook. We hope the community will like it and get inspired to share more of their learning too!
51
142
1,067
63,973
Thomas Lips retweeted

4 Feb 2025
⭐ The first foundational model available on @LeRobotHF ⭐
Pi0 is the most advanced Vision Language Action model. It takes natural language commands as input and directly output autonomous behavior.
It was trained by @physical_int and ported to pytorch by @m_olbap
👇🧵
26
172
903
131,059
Thomas Lips retweeted

14 May 2024
The @ieee_ras_icra @IDLabResearch #AIRO cloth folding competition going very well under the supervision of @victorlouisdg Best of session Wednesday 16h00. More details on airo.ugent.be/cloth_competit… Thanks for the support @euROBIN_project @ugent_fea @imecVlaanderen @Universal_Robot
9
19
3,831
Thomas Lips retweeted

19 Mar 2024
After two years, it is my pleasure to introduce “DROID: A Large-Scale In-the-Wild Robot Manipulation Dataset”
DROID is the most diverse robotic interaction dataset ever released, including 385 hours of data collected across 564 diverse scenes in real-world households and offices
5
78
300
118,876
Thomas Lips retweeted

19 Mar 2024
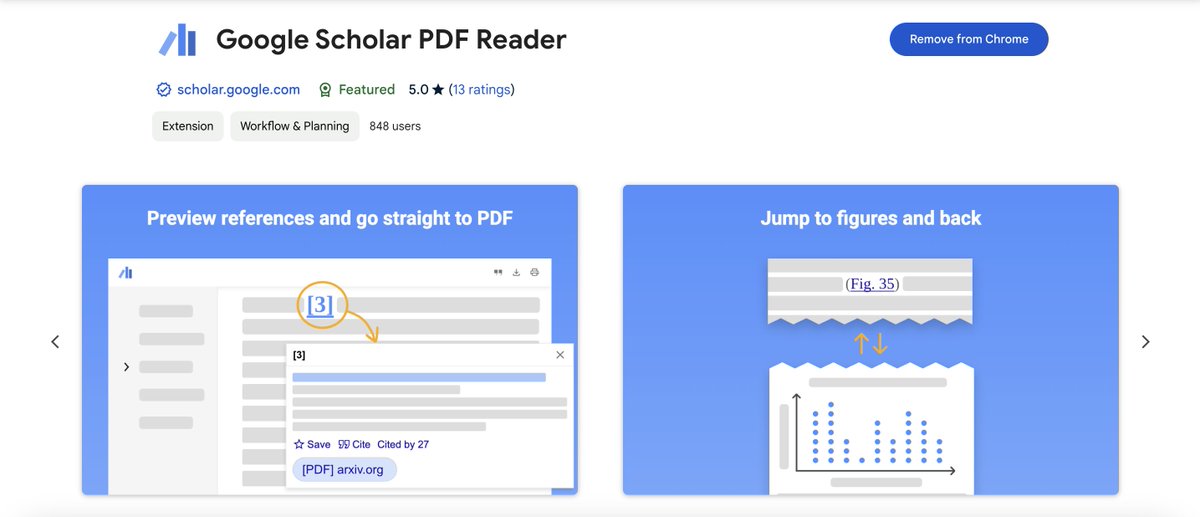
Totally impressed by the Google Scholar PDF Reader Browser Extension! It's completely transformed how I check references on the fly.📚 #GoogleScholar
🔗 scholar.googleblog.com/2024/…

5
54
357
40,763

OLMo is here! And it’s 100% open.
It’s a state-of-the-art LLM and we are releasing it with all pre-training data and code. Let’s get to work on understanding the science behind LLMs. Learn more about the framework and how to access it here:
blog.allenai.org/olmo-open-l…
26
328
1,355
358,219
Thomas Lips retweeted

17 Jan 2024
Happy to share that our work was accepted as spotlight at ICLR! I hope to see many other people working on SDEs and/or video models in Vienna🇦🇹
21 Oct 2023

I could never have imagined approaching @tolga_birdal at #ECCV last year with some questions about SDEs would lead to a wonderful collaboration, also joined early-on by the brilliant Manfred Opper. Our first result is now on Arxiv! 👇
2
9
345
Thomas Lips retweeted
10 Jan 2024
Working on #robotics 🤖manipulation of #cloth🧶? Participate in our robot competition by identifying grasp point localisation on hanging cloth items, and test them live at @ieee_ras_icra #ICRA2024 Japan! 🛎️Subscribe now: airo.ugent.be/cloth_competit… @euROBIN_project @IDLabResearch

8
21
1,558
Thomas Lips retweeted
18 Dec 2023
This semester the @IDLabResearch #AIRO developed a new course on #IntelligentRobotManipulation 🤖🤖It took an effort from both the students and us, but I’m happy with the result of our last practical session (today). @ugent_fea 1/3
1
1
14
603
Thomas Lips retweeted

20 Nov 2023
#GPT4 and real-time video feed for enhanced context awareness in social robots! 🤖👀 Explore the code and results in my latest post (and paper!): dev.to/giubots/implementing-…
#Furhat @furhatrobotics #LLM #HRI #HumanRobotInteraction #UGent #DEVCommunity
8
14
1,512

Happy to share that my latest paper "Learned Thresholds Token Merging and Pruning for Vision Transformers" is now published by @TmlrOrg.
Paper: openreview.net/forum?id=WYKT…
GitHub: github.com/Mxbonn/ltmp
Website: maxim.bonnaerens.com/publica…
19 Aug 2023

Learned Thresholds Token Merging and Pruning for Vision Transformers
Maxim Bonnaerens, Joni Dambre.
Action editor: Mathieu Salzmann.
openreview.net/forum?id=WYKT…
#imagenet #pruning #masking
1
2
4
492