
Research @NVIDIA | CUDA Robotics | Robot Manipulation
Joined October 2018
- Tweets 47
- Following 536
- Followers 327
- Likes 156
6 Photos and videos




Pinned Tweet
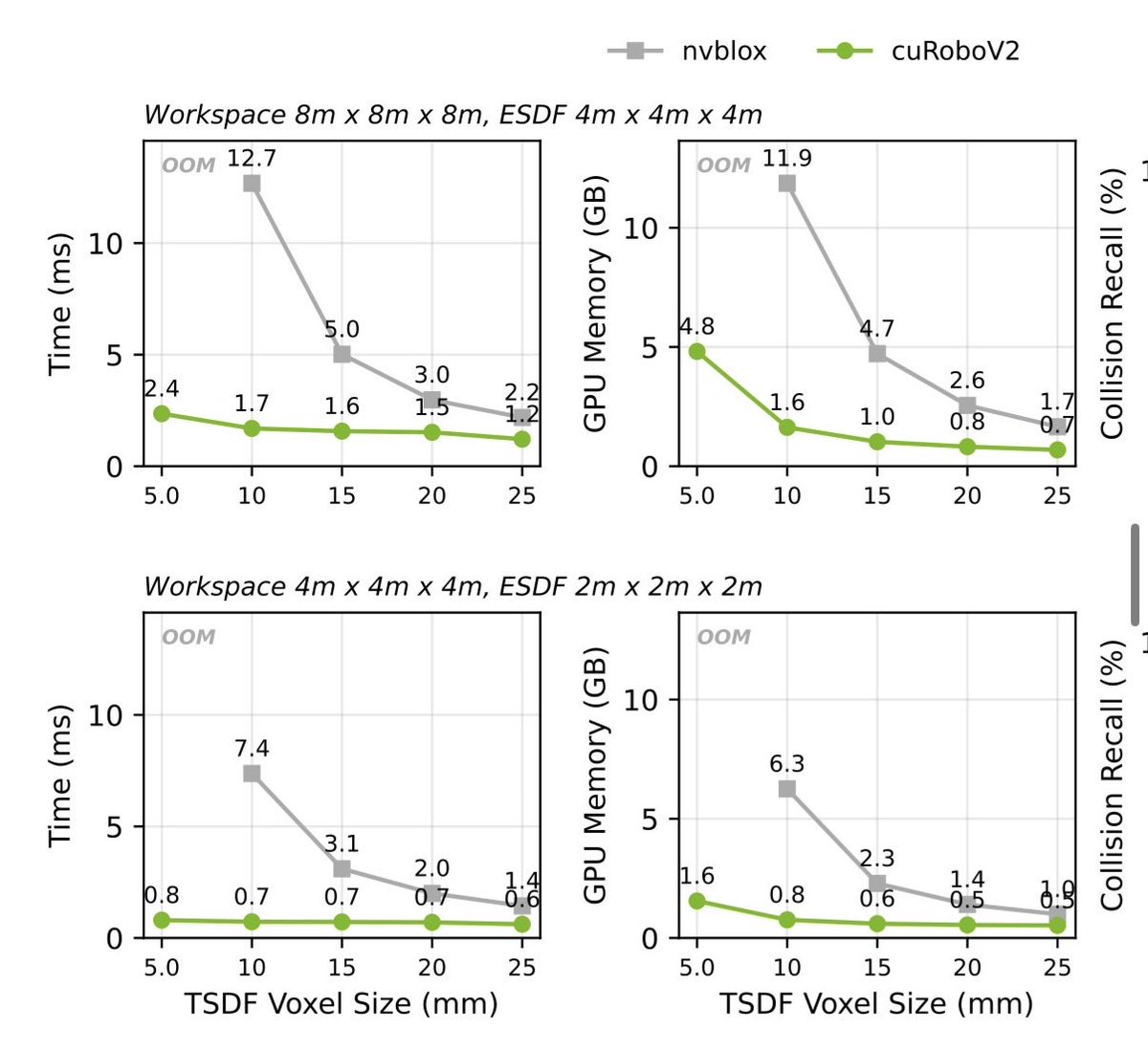
cuRobo is now open source under Apache 2.0.
cuRoboV2 adds <1 ms GPU-native TSDF/ESDF semantic mapping, whole-body IK/MPC and trajectory optimization for humanoids, ~50 ms torque-limited planning.
Report: arxiv.org/abs/2603.05493
Code: nvlabs.github.io/curobo
5
33
221
23,040
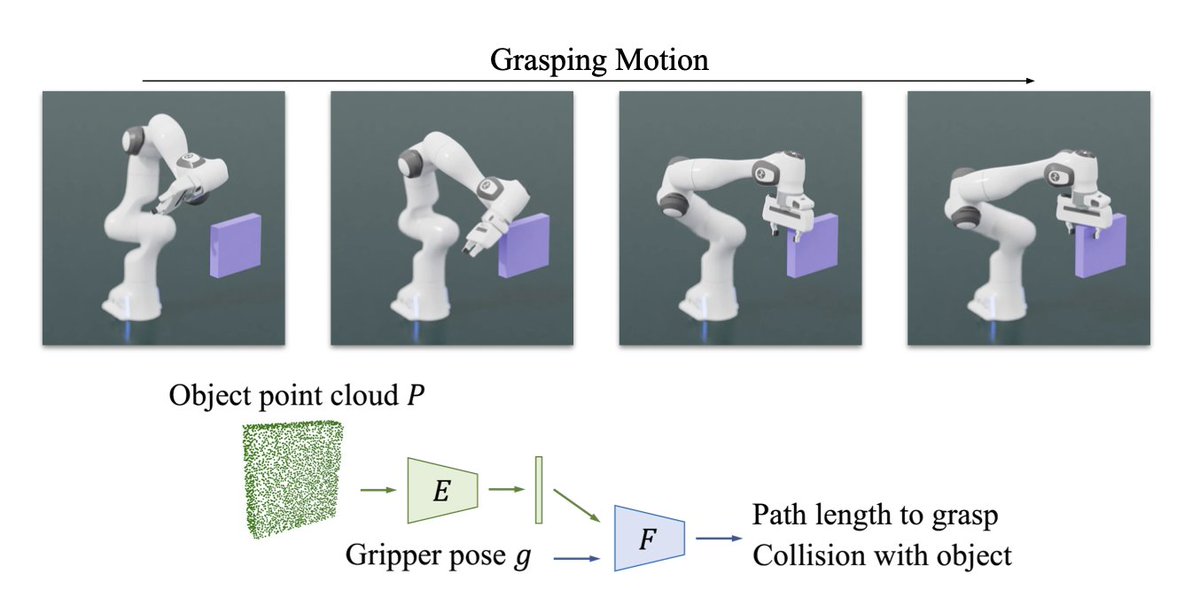
Open Source Grasp Generation for any gripper, any object. You can pair it with cuRoboV2 & Newton for large scale grasp trajectory generation. Try it out here: github.com/NVlabs/GraspGenX/…

@NVIDIA is working on one of the hardest problems in Physical AI so you don’t have to: generalist robotic pick-and-place.
We are excited to introduce GraspGenX at #CVPR2026—a foundation model for robotic grasping that works out of the box for unknown robots, novel objects, and unseen environments.
Unlike Vision-Language-Action (VLA) models or dedicated grasp networks that require expensive, embodiment-specific training, GraspGenX is cross-embodiment and works zero-shot. You simply pass a "robot prompt" alongside an image of the object to generate actions.
🚀 Key Highlights:
1) Scaling: Trained on over 2 Billion 6-DoF grasp rollouts entirely in physics simulation—a dataset size practically impossible to collect via real-world teleoperation.
2) Zero-Shot Transfer: Works out of the box for several common robot grippers widely used across the research community and industry.
3) Built for the Agentic Era: Features native MCP support, client-server architecture, and skills.md, allowing seamless integration into LLM/Agentic robotics workflows.
4) Full Pipeline Integration: Pair it with other open foundation models (like SAM3) and advanced motion solvers like cuRoboV2 for full deployment in entirely unknown environments.
If you are currently executing pick-and-place with a VLA or WAM, you can use GraspGenX to generate sim-verified trajectory data and inject it into your pipeline. No need to waste precious real-world engineering hours on data collection for standard manipulation tasks.
🌐Website: graspgenx.github.io/
💻Code: github.com/NVlabs/GraspGenX
📄Paper: arxiv.org/abs/2606.00998
📍CVPR Booth: Poster 619 on Jun 6 1:45 session at ExHall F
This work was led by the incredible @BeiningH (Princeton), in collaboration with a phenomenal team at NVIDIA: @erwincoumans, @yu_wei_chao, @balakumar_, @clembow, and Stan Birchfield
#CVPR2026
25
2,965
Balakumar Sundaralingam retweeted

Jun 3
Let's meet and chat at #CVPR!
Come by our poster or schedule a coffee chat🙌
Fri afternoon:
- Fast-FoundationStereo: nvlabs.github.io/Fast-Founda…
- CARI4D: nvlabs.github.io/CARI4D/ (w/ @XianghuiXie )
Sat morning:
- Event6D: chohoonhee.github.io/Event6D… (w/ Jae-Young)
19
154
8,663
Balakumar Sundaralingam retweeted

17 May 2024
Use both:
web.mit.edu/dimitrib/www/Les…
TO is a Newton step on the Bellman equation. Policies and value functions are "memories" of past solutions; TO should be optimizing over them at inference time. Best of both worlds. Some of the strongest RL methods do this.


5
28
181
24,321
Balakumar Sundaralingam retweeted
14 May 2024
New work on vectorizing geometric fabric controllers for RL workflows at scale. DeXtreme: Fabric Guided Policies (FGP).
Policies are hard on hardware. We need low-level controllers at deployment, which means we need them during training.
FGPs increase hardware lifetime, enable quick iteration on training and deploying policies, and allow us to inject useful inductive bias into the system.
3
15
71
16,063

8 Nov 2023
Our code for CUDA accelerated motion generation is out! Supercharge your workflows with fast batched robotics modules, including kinematics, collision queries, optimization, and motion planning. #PyTorch #Nvidia #Robots
7 Nov 2023

🤖 cuRobo, a new #CUDA accelerated motion generation toolkit, can solve complex #robotics problems in milliseconds. ⚡
It includes implementations of kinematics, collision checking, numerical and trajectory optimization, and more.
👀 #NVIDIAResearch code nvda.ws/3MxDmNG
19
126
13,661
Balakumar Sundaralingam retweeted

26 Oct 2022
DeXtreme is our new work on scaling sim-to-real for contact-rich manipulation with a vision-based state estimation on a robot hand with the infrastructure we have been developing with Isaac Gym over the past one year.
arxiv.org/abs/2210.13702
dextreme.org/
3
40
266
Balakumar Sundaralingam retweeted

1 Jul 2022
I'm excited to share our #RSS2022 workshop paper: Neural Motion Fields: Encoding Grasp Trajectories as Implicit Value Functions.
w/ @Adithya_Murali_ , @balakumar_ , Wei Yang, @animesh_garg, and Dieter Fox at @nvidia.
Paper: arxiv.org/abs/2206.14854
Video: youtu.be/B-pEhT1pi-Q
2
26
117
Balakumar Sundaralingam retweeted
31 May 2022
Factory: Fast Contact for Robotic Assembly, our recent work, is a set of simulation methods & robot learning tools for contact-rich interactions for robotic assembly. It will be presented at RSS next month.
Paper: arxiv.org/abs/2205.03532
Website: sites.google.com/nvidia.com/…
6
62
347
Balakumar Sundaralingam retweeted

27 Mar 2020
Update on Robotic Conferences due to Coronavirus:
RSS -> virtual conference
WAFR -> postponed by one year (to June 2021)
ICRA -> decision on April 6th (virtual vs. postpone to end of 2020)
IROS -> as planned (Oct 2020)
Humanoids -> as planned (Dez 2020)
1
10
24
Balakumar Sundaralingam retweeted

8 Jan 2020
I’ve run the Personal Robotics Lab for 15 years now, first @SCSatCMU and now @uwcse. Here’s my personal take on how to build an academic research flywheel. Enjoy!
linkedin.com/pulse/academic-…
1
26
71
Balakumar Sundaralingam retweeted

11 Dec 2019
Spent the last two days crisscrossing Mumbai for meetings. All those autonomous miles in Chandler, Arizona are easily going to generalize for AV roll outs here. Yeah, right.
7
11
108
Balakumar Sundaralingam retweeted

26 Oct 2019
I saw this robotics scientist working today.
Commenting his code.
Writing unit tests.
Testing in simulation first.
Operating the robot with his hand on the e-stop, observing carefully.
Like a psychopath.
4
7
63
8 Oct 2019
Dexterous hand teleop using RGBD cameras, now possible!
8 Oct 2019

We are excited to release our work on DexPilot, a markerless, glove-free and vision based teleoperation of dexterous robot hand-arm system
pdf is here github.com/ankurhanda/dexpil…
link to more videos sites.google.com/view/dex-pi…
youtu.be/qGE-deYfb8I
2
Balakumar Sundaralingam retweeted

16 May 2019
I am co-organizing Women in Robotics V, taking place on June 23rd at RSS 2019 in Freiburg. We are accepting contributions for two poster sessions to encourage the participation of young female robotics researchers, offering travel grants. More info here: sites.google.com/view/rss201…
9
19
Balakumar Sundaralingam retweeted

22 Apr 2019
Some of the YCB objects in our lab are thrown as trash by a new intern😂😂 Wonder if it possible to just buy these missing items....
1
6
Balakumar Sundaralingam retweeted

13 Apr 2019
I don’t like the term “work-life balance” because it implies “balance” is something we can achieve and then be set. Instead, I recognize there are lots of things I want to do - some for work and some personal. I focus on budgeting my time in a way that I feel happy with each day.
16
34
305
Balakumar Sundaralingam retweeted
7 Apr 2019
@oletaknowsstuff @Dr_KatieG1 @AJSantiagoLopez @BezaTuga @SusannaLHarris @Ph_D_epression @Migz614 @YouGoChi @ndchiappini @AlecAstrochem @SnarkDivine
There’s no way to list all, but these are a few of the many students/postdocs who have a powerful voice here on #AcademicTwitter
4
9
46
Balakumar Sundaralingam retweeted
30 Mar 2019
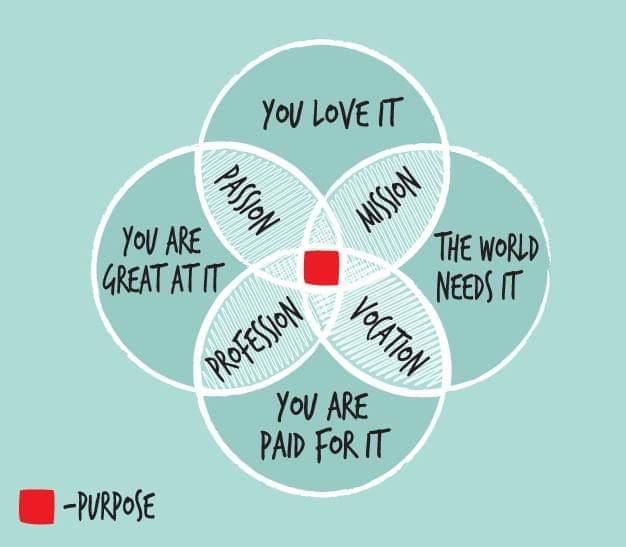
As someone who spent many years on the fringes of this diagram, searching for that little red square and thinking I’d never find it or couldn’t have it, I will say it’s worth persevering for.
Also, important to note the circles are constantly shifting, so keep looking.
28 Mar 2019

Saw this recently. Great way to think about which circle you find yourself in today!
4
55
237