
8 Photos and videos


Clemens Eppner retweeted
@NVIDIA is working on one of the hardest problems in Physical AI so you don’t have to: generalist robotic pick-and-place.
We are excited to introduce GraspGenX at #CVPR2026—a foundation model for robotic grasping that works out of the box for unknown robots, novel objects, and unseen environments.
Unlike Vision-Language-Action (VLA) models or dedicated grasp networks that require expensive, embodiment-specific training, GraspGenX is cross-embodiment and works zero-shot. You simply pass a "robot prompt" alongside an image of the object to generate actions.
🚀 Key Highlights:
1) Scaling: Trained on over 2 Billion 6-DoF grasp rollouts entirely in physics simulation—a dataset size practically impossible to collect via real-world teleoperation.
2) Zero-Shot Transfer: Works out of the box for several common robot grippers widely used across the research community and industry.
3) Built for the Agentic Era: Features native MCP support, client-server architecture, and skills.md, allowing seamless integration into LLM/Agentic robotics workflows.
4) Full Pipeline Integration: Pair it with other open foundation models (like SAM3) and advanced motion solvers like cuRoboV2 for full deployment in entirely unknown environments.
If you are currently executing pick-and-place with a VLA or WAM, you can use GraspGenX to generate sim-verified trajectory data and inject it into your pipeline. No need to waste precious real-world engineering hours on data collection for standard manipulation tasks.
🌐Website: graspgenx.github.io/
💻Code: github.com/NVlabs/GraspGenX
📄Paper: arxiv.org/abs/2606.00998
📍CVPR Booth: Poster 619 on Jun 6 1:45 session at ExHall F
This work was led by the incredible @BeiningH (Princeton), in collaboration with a phenomenal team at NVIDIA: @erwincoumans, @yu_wei_chao, @balakumar_, @clembow, and Stan Birchfield
#CVPR2026
10
40
4,989
Clemens Eppner retweeted

20 Jun 2025
In robotics benchmarks are rarely shared. New eval setups are created for each new project, a stark difference from evals in broader ML. But generalist policies share a problem statement: do any task in any environment. Can generalist capabilities make robot evaluation easier?
6
21
139
30,997
Clemens Eppner retweeted

7 May 2024
Excited to share our latest work on industrial pick-and-place in collaboration with @IntrinsicAI announced at #Automate2024
Technical blog:
developer.nvidia.com/blog/au…
w/ @clembow @balakumar_ Xuning Yang
6 May 2024

At #Automate2024, @IntrinsicAI highlights advancements in #robotic grasping and industrial scalability powered by NVIDIA Isaac Manipulator foundation models. These models accelerate AI training & enable unprecedented robot perception & zero-shot learning. nvda.ws/4blVJiq

2
16
1,990
Clemens Eppner retweeted
20 Apr 2023
At @NVIDIAAI research, we have been working on general-purpose robotic rearrangement 🤖
Today, we are announcing CabiNet, our recent work on scaling object rearrangement in clutter with synthetic data:
cabinet-object-rearrangement…
w/ @a__mousavian, @clembow, @fishbotics
20 Apr 2023

Excited to share our ICRA’23 @ieee_ras_icra work by @Adithya_Murali_
We scale up neural collision detection for object rearrangement with procedurally generated synthetic data.
Project: nvda.ws/3USKFlW
Video: nvda.ws/3H0sdSI
🧵👇
1
14
97
11,191

CabiNet: Scaling Neural Collision Detection for Object Rearrangement with Procedural Scene Generation
abs: arxiv.org/abs/2304.09302
project page: cabinet-object-rearrangement…
3
15
124
51,258
Clemens Eppner retweeted
16 Dec 2022
Excited to release Motion Policy Networks! w/ @fishbotics @clembow
If you are at @corl_conf in NZ, checkout Adam’s presentation on Sunday, Dec 18, 9:35AM (Session 5)
15 Dec 2022
Introducing the Motion Policy Networks (MπNets) Neural Policy developed to combat the challenges of traditional motion planning and generating collision-free motions in unknown environments. Learn how MπNets was trained using #NVIDIAOmniverse. nvda.ws/3uR7HNY
1
8
1,068
Clemens Eppner retweeted
9 Dec 2022
Robotics AI researchers🤖 have you wondered - are we really making progress in robotics? Will we have our own ImageNet moment? Are we using the right benchmarks, if any?
Join us for our Benchmarking workshop on Thursday, Dec 15 at @corl_conf sites.google.com/view/corl22…
🧵👇

2
16
92
Clemens Eppner retweeted

31 Oct 2022
Annoyed that existing motion generation systems promise the world but leave you with endless parameter tuning? Announcing Motion Policy Networks (MπNets)! 🤖🦾🪩
Website (code, data): mpinets.github.io
Paper: arxiv.org/abs/2210.12209
W/ @Adithya_Murali_, @clembow, et. al
4
23
83
Motion Policy Networks
abs: arxiv.org/abs/2210.12209
project page: mpinets.github.io
1
18
145
Clemens Eppner retweeted

7 Jul 2022
Very excited to share our new review paper on deep learning in grasping, focusing on 6-DoF grasping works.
Got to work with some great collaborators including @clembow @a__mousavian @Juxi @leto__jean
We hope the community can find our review useful!
arxiv.org/abs/2207.02556
6
27

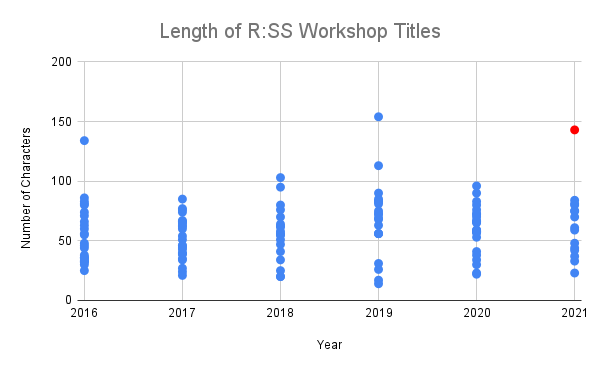
13 Jul 2021
Extremely electrified to be part of organizing the workshop with the second-longest title in recent #RSS history (see red dot in Fig. 1). We are only surpassed by the infamous...
1
1
4
13 Jul 2021
...2019 workshop: "Pervasively neural-dynamic robotics: Do insights from neuroscience, cognitive science, and neuromorphic engineering lead to a radically new vision? (0.5d)"
Tune in on Tuesday 10AM PDT to find out the title! Or click here: sites.google.com/view/rss-ai… #RSS2021
Clemens Eppner retweeted

30 Jun 2021
We have a great lineup of speakers for our #RSS2021 workshop on understanding gaps between academic and industrial applications in #Robotics. Consider submitting extended abstracts. Deadline is tomorrow.
sites.google.com/view/rss-ai…
1
5
31 Jan 2021
aibestpape.rs now also shows the most cited publications for each listed conference (based on Google Scholar data; only venues that are at least 6 months old).
Clemens Eppner retweeted
1 Dec 2020
Motion planning methods need 3D model of the scene/voxelization to check for collisions. Inspired by implicit methods, we propose a model that can check 500K collision queries of unknown object against the scene in one fwd pass.
Project Link: tinyurl.com/yx9we46n
1
16
70
Clemens Eppner retweeted

30 Nov 2020
ACRONYM: A Large-Scale Grasp Dataset Based on Simulation
arxiv.org/abs/2011.09584
1
16
94
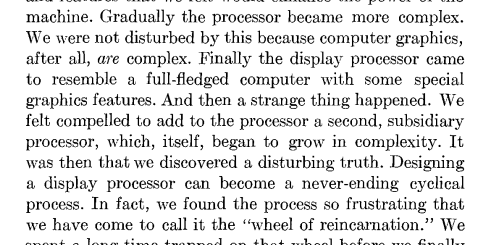
22 Sep 2020
"And then a strange thing happened." The design pitfall known as the "wheel of reincarnation"... (from "On the Design of Display Processors" by Myer and Sutherland, 1968. cva.stanford.edu/classes/cs9…)
1
Clemens Eppner retweeted
30 May 2020
Incredibly thrilled that our work on robotic grasping is a Finalist for Best Paper Awards at #ICRA_2020! Looking forward to the conference starting tomorrow!
w/ @a__mousavian @clembow @chris_j_paxton Dieter Fox
Paper: arxiv.org/abs/1912.03628
NVIDIA blog: nvda.ws/36O2hX5
4
22
89
6 Apr 2020
Nice "Rationality" lectures by Stephen Pinker and Guests:
harvard.hosted.panopto.com/P…
2