
Manager of Applied Science @ Amazon Fulfillment Technologies & Robotics. Berliner. Opinions are my own.
Joined September 2013
- Tweets 711
- Following 329
- Followers 413
- Likes 1,500
35 Photos and videos








Pinned Tweet

2 Oct 2025
Today we're announcing the release of "Kaputt", a breakthrough real world dataset for visual defect detection, 40x larger than SoTA. Spoiler: Even advanced AI models perform barely above random chance. Check out our blog post and paper #cv #iccv @ICCVConference @AmazonScience
2 Oct 2025

Announcing Kaputt: a large-scale dataset for visual defect detection in retail logistics with 238,421 images across 48,376 unique items – 40x as large as current benchmarks:
4
213
Sebastian Höfer retweeted

Jun 7
Amazon's Sebastian Hoefer (@hoeferse) discusses his team's work on visual defect detection at @CVPR — including the Kaputt dataset and #CVPR2026 challenge.
Learn more about the novel dataset: amzn.to/4oe4nHy
1
2
789
Sebastian Höfer retweeted
Jun 3
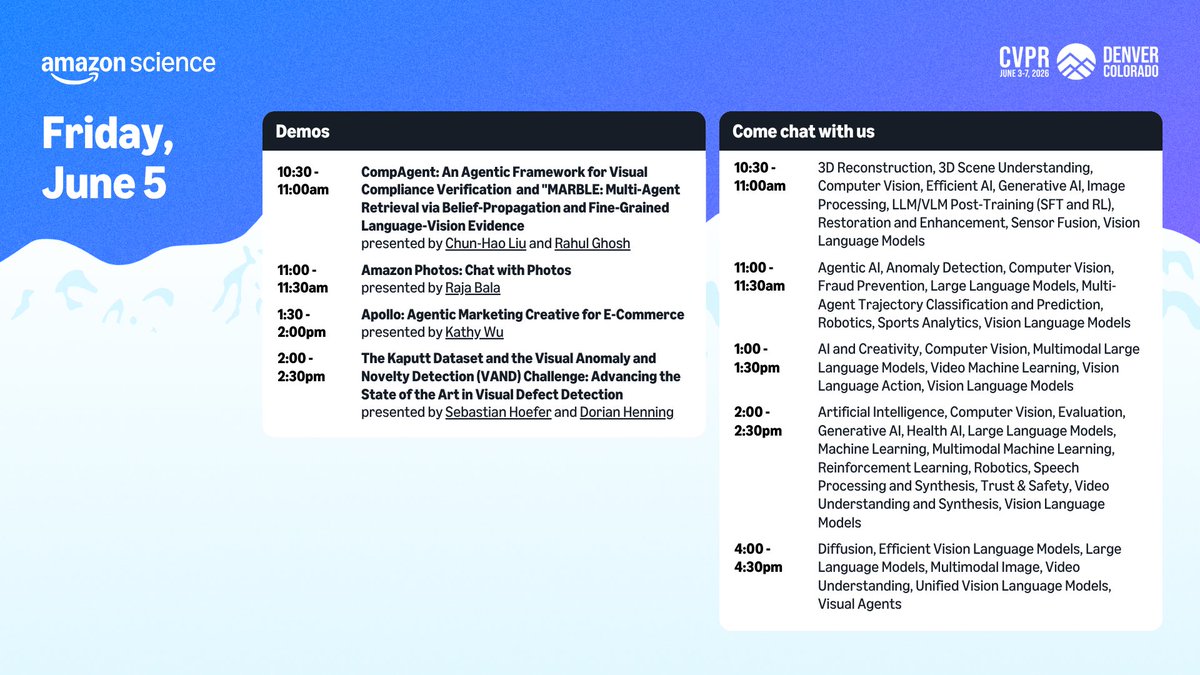
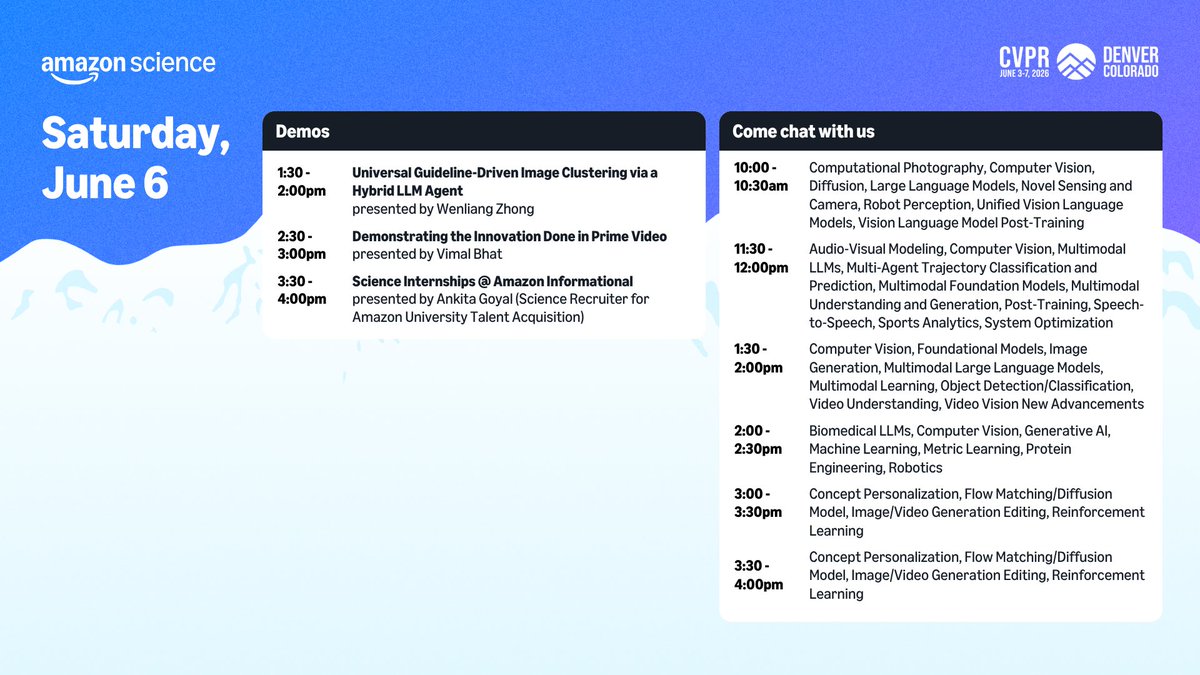
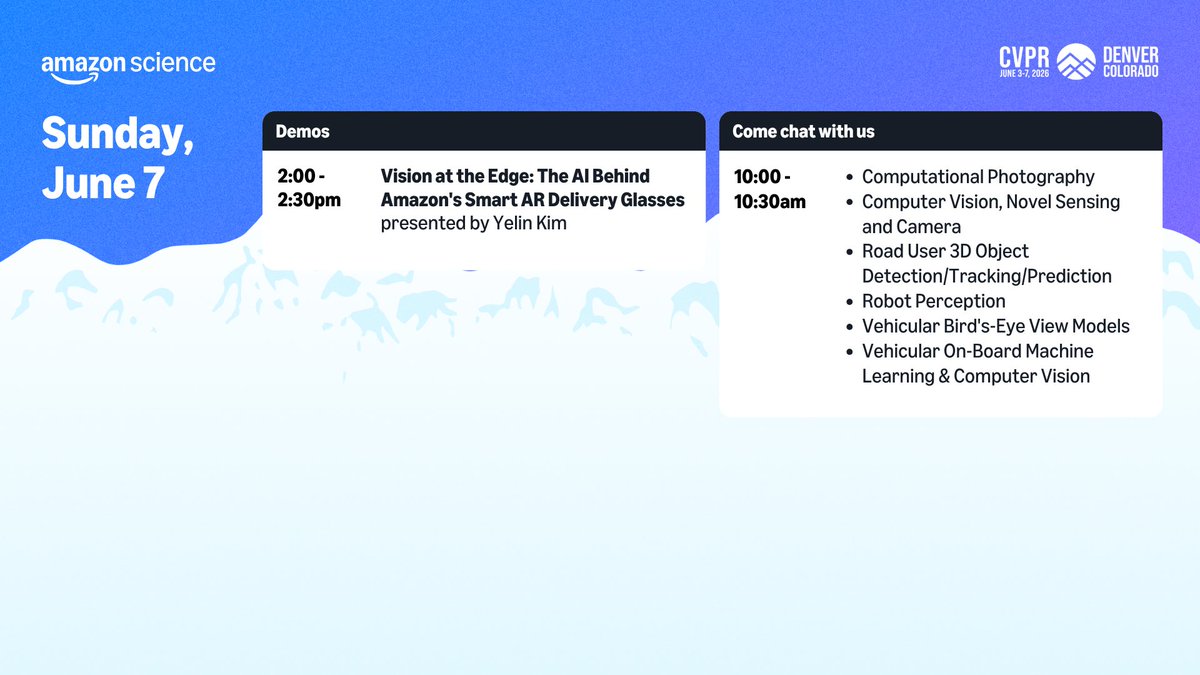
Attending #CVPR2026 in Denver? We'll be at booth 349 showcasing our latest research with live demos throughout the conference. Stop by to meet our scientists and see their work in action.
Check out the full booth schedule:
1
3
621
Jun 3
Giving a keynote at the VAND 4.0 workshop at CVPR this week! 🎤
Talking about our Kaputt dataset for visual defect detection the clever ideas challenge participants came up with to tackle it.
📅 June 4th, 1–6 PM 📍 Room 601, Denver ( Zoom)
See you there! #CVPR2026
1
35
Jun 1
Heading to CVPR in Denver this week! ✈️ First one since 2022 - can't wait to wallow in posters and heated science debates
(Photo attached as proof of what we all looked like back then… 😷)
Hit me up if you're around! ☕
#CVPR2026 #ComputerVision #AgenticAI #AnomalyDetection
1
48
Sebastian Höfer retweeted

Apr 9
🚀 Get ready to build anomaly detection models that actually work in production! And win a share of $25,500 USD total prize pool! VAND 4.0 @CVPR 2026. Participate in the Kaputt2 Challenge! sites.google.com/view/vand4-…
3
9
2,879
Sebastian Höfer retweeted

15 Oct 2025
Introducing NotebookLM for arXiv papers 🚀
Transform dense AI research into an engaging conversation
With context across thousands of related papers, it captures motivations, draws connections to SOTA, and explains key insights like a professor who's read the entire field
57
503
2,895
215,697

Mobile ALOHA's hardware is very capable. We brought it home yesterday and tried more tasks! It can:
- do laundry👔👖
- self-charge⚡️
- use a vacuum
- water plants🌳
- load and unload a dishwasher
- use a coffee machine☕️
- obtain drinks from the fridge and open a beer🍺
- open doors🚪
- play with pets🐱
- throw away trash
- turn on/off a lamp💡
Project website: mobile-aloha.github.io/
Co-lead @tonyzzhao, advised by @chelseabfinn
(amazing photographing from @qingqing_zhao_ )
319
1,640
6,836
2,977,484
Sebastian Höfer retweeted

5 Jan 2024
Introducing Robo360 dataset 🚀, the first real-world omnispective multi-view and multi-material robotic manipulation dataset. Robo360 captures synchronized multi-modal robot-object interaction data (video, audio, proprioception, control) to facilitate research in dynamic novel-view synthesis, robot learning, physics understanding, world models, and more! Code and data coming soon!
5
32
173
23,416
20 Dec 2023
We're hiring! My science team at Amazon Fulfillment Technologies and Robotics in Berlin is hiring excellent scientists to work on visual defect detection models that see millions of images every day, delighting millions of customers. Apply! @AmazonScience
amazon.jobs/en/jobs/2520894/…
8
3
5
1,027
6 Oct 2023
Finally got to see one of those Parisian bed bugs everyone's been so afraid of. Looks pretty cute to me! Thanks @huggingface for showcasing them #ICCV2023
Photo credit: @Faty_404
ALT Cuuute!
3
343
5 Oct 2023
1
2
17
4,033
4 Oct 2023
Overwhelmingly inspiring experience at #ICCV2023 so far! I'm still available for coffee chats throughout the week, dont hesitate to drop me a PM. You can also catch me at the @AmazonScience booth starting 18:30 tonight!
4
454
3 Oct 2023
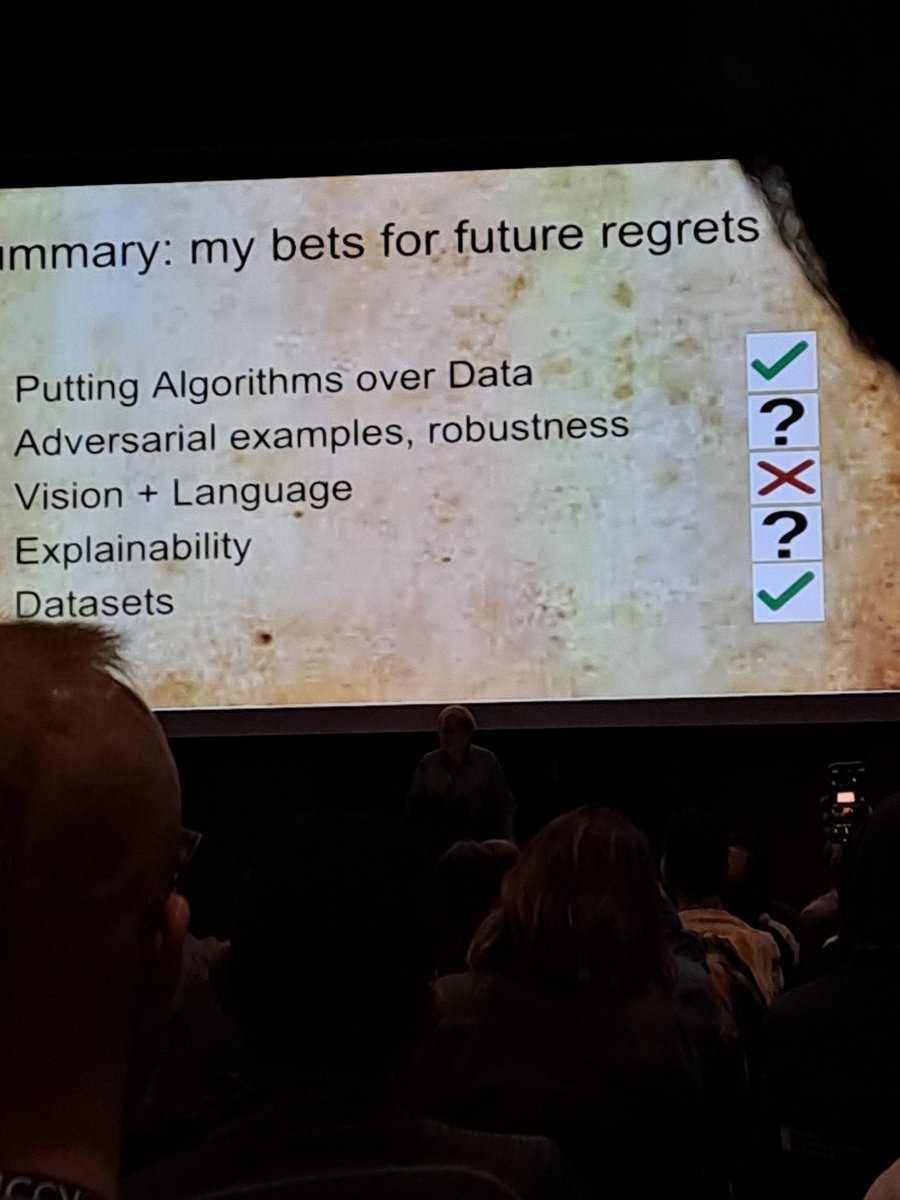
What an inspiring day 1 at #ICCV2023! Alyosha Efros' talk at the Quo Vadis workshop was both entertaining and insightful.
I'm open to coffee chats all week if you want to talk e.g. about data-centric AI, anomaly detection and science internships and opportunities at Amazon!
1
5
630
2 Oct 2023
Bonjour Paris! I'll be attending ICCV the whole week, please drop me a PM if you'd like to have a chat! #iccv20
1
2
326
5 Sep 2023
I'm still wearing them at dinner parties, from time to time
4 Sep 2023

Does anyone still use Markov chains?
1
156
Sebastian Höfer retweeted

31 Aug 2023
DINOv2, the cutting-edge computer vision model trained through self-supervised learning to produce universal features, is now available under the Apache 2.0 license.
Onward with open source AI.
31 Aug 2023

Today we’re announcing two new updates in our computer vision work — a new, expanded license for our DINOv2 model and the release of FACET, a comprehensive new benchmark dataset to help evaluate and improve fairness in vision models.
More details ➡️ bit.ly/3L35E1U
🧵
34
212
1,556
333,587