
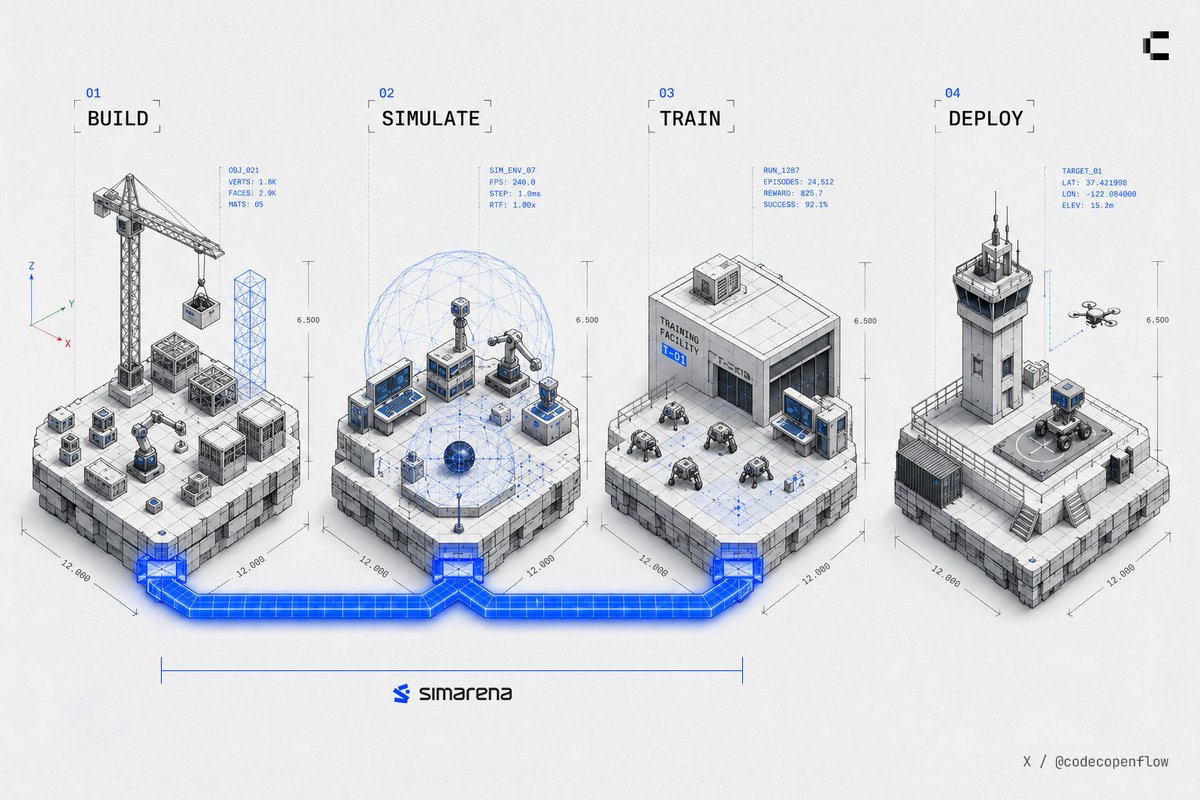
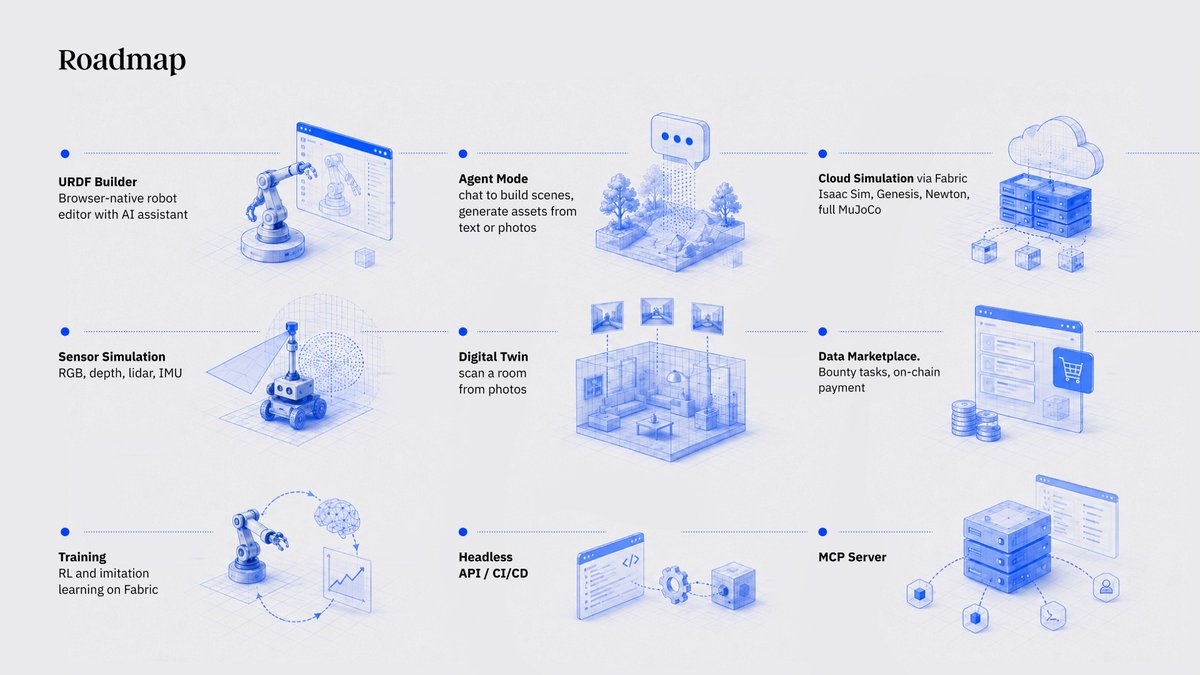
Simulate, train, deploy, and fund robots from a single stack.
Joined January 2025
- Tweets 574
- Following 11
- Followers 7,925
- Likes 1,612
156 Photos and videos









Pinned Tweet

May 25
Until today, getting a robot into a simulator took 3 weeks.
Now it takes a URL: simarena.ai
34
54
297
154,379
We kept noticing how many of you follow from the Chinese speaking side, so we started a Chinese language account.
Everything we post here, in Chinese.
Follow @CodecFlowCN.
1
3
16
932
Jun 12
Claude Fable 5 Hermes one-shotted a documentary on how far robots have come.
One single prompt: researched the history, pulled the archive footage, sequenced it, scored it, cut it, and ran narration through Higgsfield MCP.
Robots were first judged on whether they could move, then whether they could work, then whether they could decide.
Next test is trust. And trust gets earned in simulation. SimArena.
2
8
39
2,443
Jun 10
Scenes in SimArena start by generating from a prompt or image, or by importing from storage or another platform.
Every object is rebuilt in 3D, placed at real-world scale, in a scene that stays workable while it assembles.
SimArena does it better than anything else out there.

while building the agentic mode in SimArena, I kept thinking about the UX problem most GenAI platforms have: you fire off a prompt and wait minutes for the entire scene to load before you can interact with anything
I worked with @itsdamnvinci this week to make SimArena's workflow smoother. Instead of blocking operations, jobs run concurrently. scene objects stream in as lightweight placeholder boxes, then swap to final @NVIDIARobotics SimReady assets
now you can keep working while your scene renders. no more waiting
3
5
41
5,453
Jun 9
Every roboticist has lost a week to a URDF file: meshes that won't load, inertias that are subtly wrong or joints that fight back.
SimArena skips the hand-authoring. You import and start.
2
5
46
1,282
Jun 6
We have been building in the UAE for over a year.
@SuperteamAE has been a big part of that: events, intros, and the early @Solana community that gave us reps before CT noticed.
If you're a robotics builder in the UAE, reach out. We want to meet you.
8
6
55
6,675
Jun 5
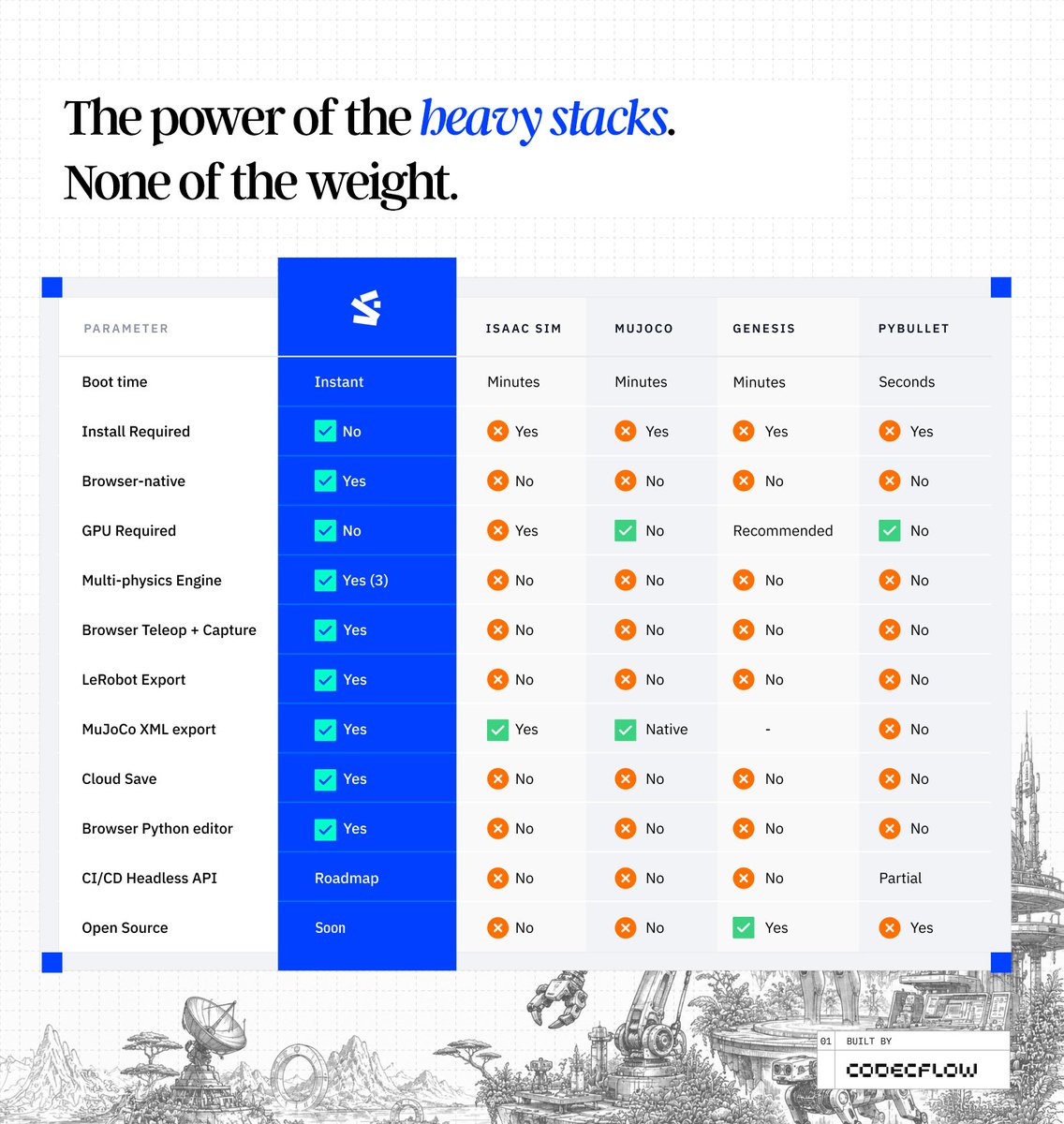
SimArena is the easy way into the simulators you already trust.
8
16
81
15,999

first tests adding wuji hand to simarena
Jun 2

We release Wuji MJLab, an open-source MuJoCo environment for dexterous hand manipulation.
It includes a cube reorientation task, a sim2real pipeline, and the setup needed to reproduce the system.
We will be at ICRA booth 121 with a live demo and welcome discussions on dexterous manipulation.
Code: github.com/wuji-technology/w…
Contributors: Jielin Wu, @yaoshzh, @BergerHunger, Li Chengmeng.
This project is based on @kevin_zakka’s mjlab project.
4
4
30
2,675
Jun 3
The same physics engines used in robotics research run in a tab now.
Took a few years, but the browser caught up.
8
47
3,135
CodecFlow retweeted

Jun 2
Founder Stories: @unmoyai
Building: @codecopenflow
Member: @SuperteamAE
His vision, and why the UAE ↓
7
13
66
3,996
Jun 2
Or run the whole thing in the browser. No rig, no drift, no clamp. Free.
SimArena.
1
8
38
1,383


CodecFlow retweeted

Jun 1
Your journey to robotics is easier than you thought.
No ROS installs.
No local GPU setup needed
Just open SimArena by @codecopenflow in your browser → import a robot → design your scene → run real physics (MuJoCo WASM, Rapier, PhysX) → record perfect training data → export straight to LeRobot format.
This is by far the fastest process to training robots out there, go check it out.
7
8
40
1,998
May 30
A good robot has already failed thousands of times before it moves in the real world.
That's what simulation is for. You let it fall every way it can, on every surface, and it figures out why each time, until the real one barely fails at all.
3
5
40
1,786
May 28
Vibecoding a simulation is about to be a thing.
You talk to your AI assistant, it talks to the simulator, the scene builds itself while you watch. Closer than you'd think.
1
5
34
1,492
CodecFlow retweeted

May 28
they told me to print these
what did i get myself into😳

3
2
19
1,454
Genesis World is amazing for simulations that require different types of physics, such as fluids, cloth, grains, and more. With SimArena, you can already use Genesis without having to rebuild the scene when MuJoCo is not enough
May 27

We are back again :) After three weeks of quiet building.
Introducing Genesis World 1.0, our latest simulation platform, the second release in our full-stack suite. Open-sourced.
Robotics is still bottlenecked by the 1× speed of the physical world. Every model, checkpoint, and data recipe eventually needs to be tested on physical hardware, slowly, expensively, and with limited coverage.
One hour in reality can become 100 days in simulation. That is how robotics model iteration moves from a wall-clock bottleneck to a compute problem.
To make this work, simulation has to be both fast and trustworthy.
Over the past year, we rebuilt the entire stack: a GPU-accelerated cross-platform compiler, penetration-free multi-physics contact solvers, unified rigid and deformable physics, and a photo-realistic renderer purpose-built for physical AI applications.
We built Nyx, a high-performance path-traced rendering engine for robotics application.
Genesis World 1.0 achieves near realtime performance with our latest development for penetration-free IPC solver, supporting various types of deformables beyond rigid bodies. It supports contact-rich, dexterous manipulation simulation across different embodiments: unitree, sharpa, wuji, genesis hand and various types of grippers.
Under the hood is Quadrants, our effort in pushing forward cross-platform GPU-accelerated computation. Quadrants started as a fork of Taichi, and we rebuilt most of the critical parts for optimizing simulation workloads, giving 10x faster launch time and up to 4.6x runtime performance compared to the initial Genesis release.
Together, they bring us to an unprecedentedly low sim-to-real gap, enabling zero-shot real-to-sim model evaluation and much faster iteration of GENE.
All available today.
Genesis World 1.0: github.com/Genesis-Embodied-…
Quadrants: github.com/Genesis-Embodied-…
Nyx: github.com/Genesis-Embodied-…
4
6
38
3,219