
Jun 8
🗓️ June 9-11
#Shoptalk Barcelona is our next stop. Meet Yiannis Darya to see how ALLSIDES creates true-to-life 3D digital twins.
Let’s talk: richer product pages, better visualization, fewer returns.
#digitaltwins #3Ddata #3Dscanning #RetailTech
47

🚨 NEW COURSE
📅 June 15th-18th, 2026
🌐 Online format
More info: transmittingscience.com/cour…
#Photogrammetry #LaserScanning #3DData
1
1
2
141

🎥 The recordings of the webinar series "The Lifecycle of 3D Data in Cultural Heritage" is now live on YouTube!
📌 Go check them out: youtube.com/@EUreka_3DXR/pla…
#eureka3d #eureka3dxr #3ddata #culturalheritage #webinar2026

3
3
84

Apr 30
#オビツ50
ウィッグがボサボサで写真撮るのはダメなのか!(; ・`д・´)
・・・私の写真はウイッグがほとんど写ってないので問題ないな!!(/・ω・)/
昔造った打刀の試作大小を試着してみる 少し手直しすれば問題なく使えそう
……なんだけど肝心の3Ddataが見つからない…(´Д⊂ヽ



1
43
234
4,185

Apr 17
Need 3D city data fast?
Outline an area → export → drop into your project.
No GIS headaches.
geopogo.com
#3DData #UnrealEngine #GameDev
2
129

Mar 10
With ArcGIS Pro, you can now export STL files and 3D print real places - like the Jefferson Memorial or even exaggerated bathymetry around Crater Lake.
Source:
geoawesome.com/eo-insights-r…
#Geoawesome #ArcGISPro #3DPrinting #GIS #Bathymetry #3DData
4
420
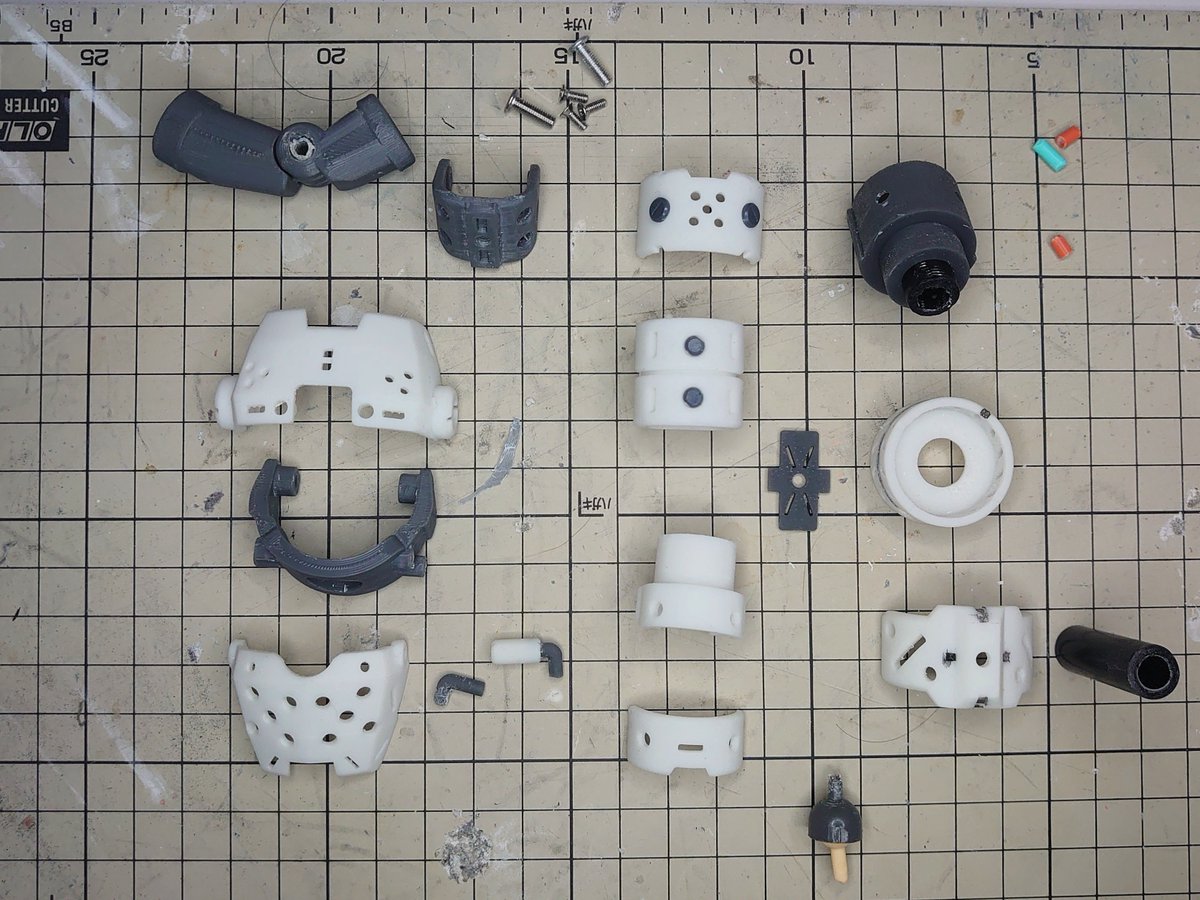
Feb 26
脚のフレーム部分をFDMでプリントしてる間に腕部の3DDATAを作成 光でプリント
手足の長さのバランスがイマイチかな・・・
3Dプリンタ 手直し前提での使用なのであまり考えずに使ってもさして問題ないです
失敗を手直ししても私が一から作るより断然早い&綺麗にできるし…

1
31
189
5,600
Feb 16
3DDATAが出来たらプリントして軽く表面処理して完成!
それは出来る人!!
アレ?なにか違うなぁ…ちょっと修正・・・
ここ修正したらラインが変わるからこっちも修正・・・
修正すると可動に干渉するからちょっと変形・・・
・・・変形できん! 描き直すか!(´Д⊂ヽ
私はこれの繰り返し・・・

1
11
87
889

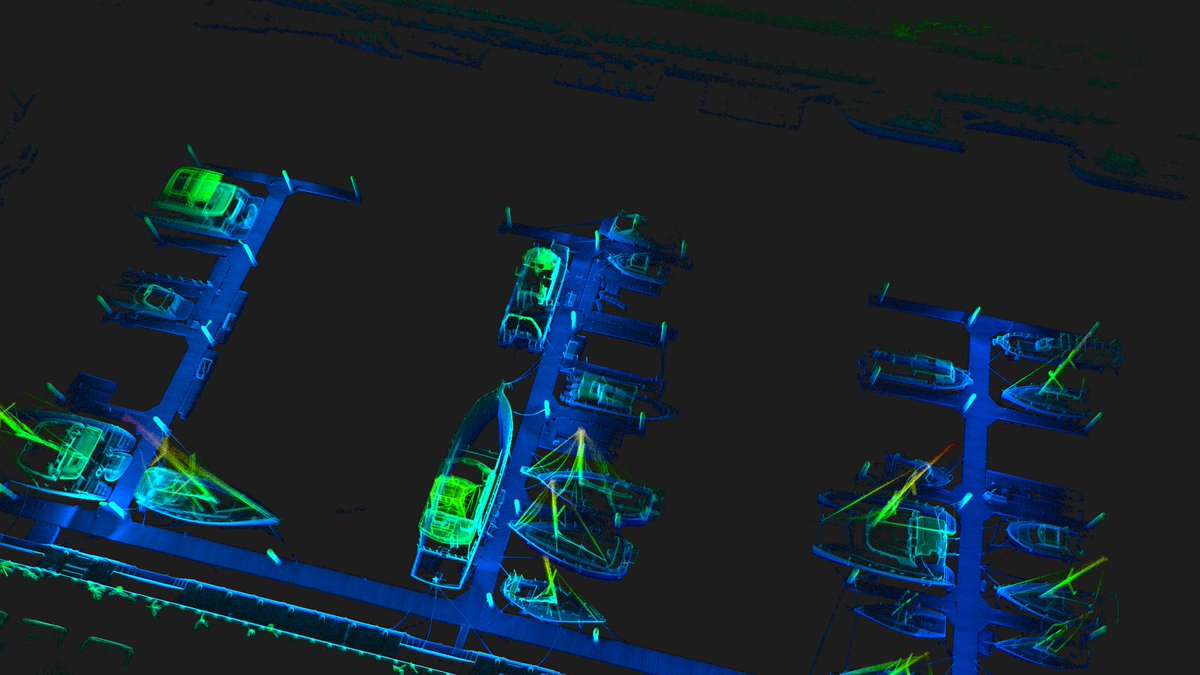
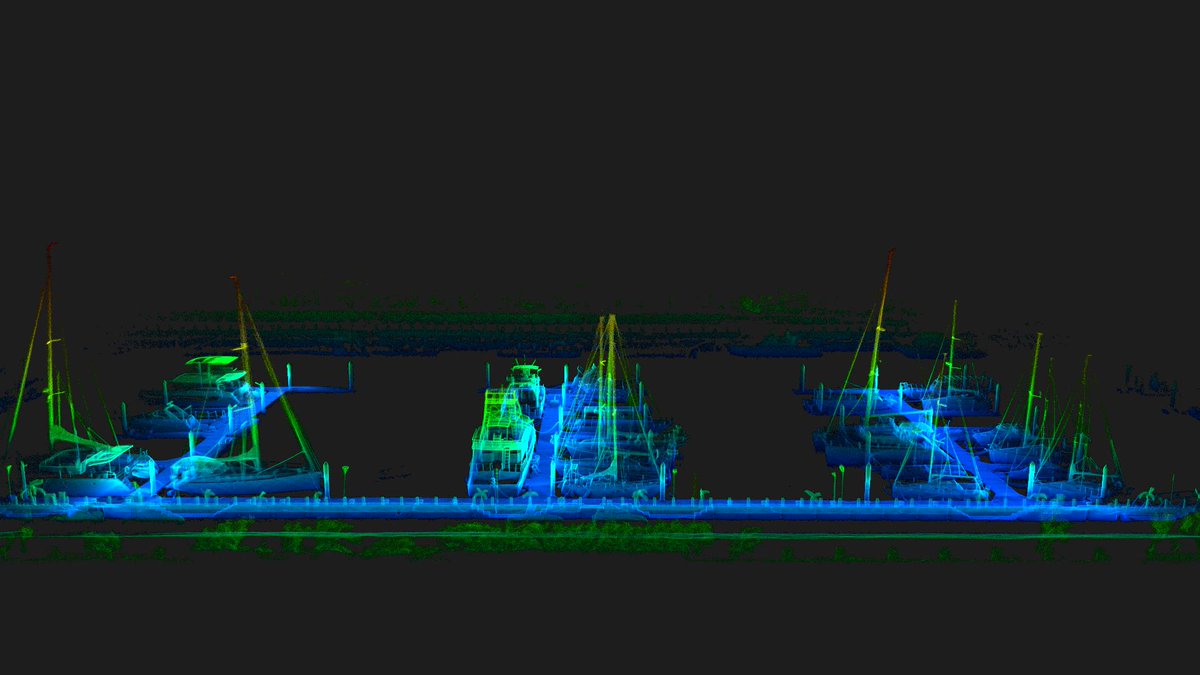
Jan 26
Harbor LiDAR data output.
Clear vessel geometry, dock layout, and spatial relationships — ready for mapping, inspection, and digital port management.
#LiDAR #PortMapping #PointCloud #3DData

2
100
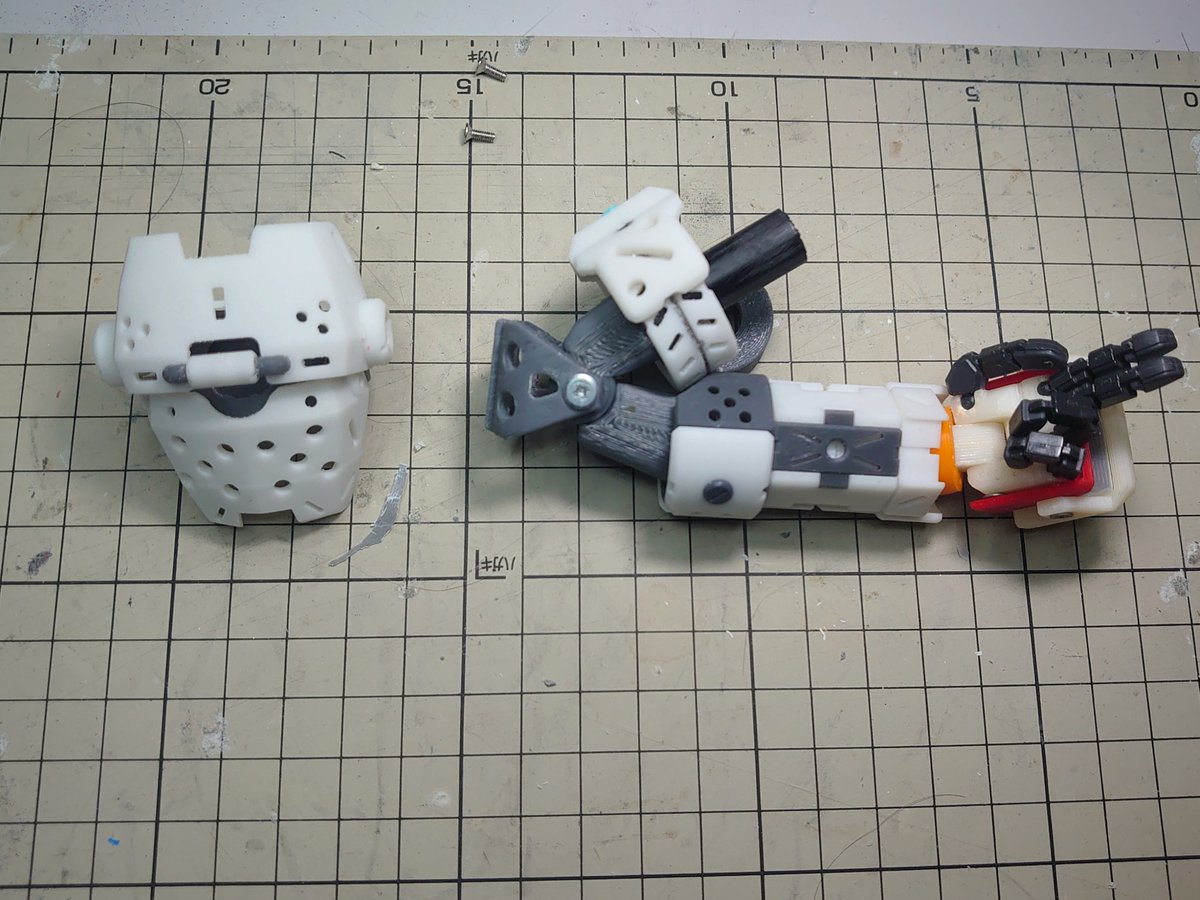
Jan 16
武装MIZUKIさん足首の周りを修正
・・・しようとしてるんですが上手くまとまらない(>_<)
とりあえずフレーム周りを試作
正直パテで外装造形してからそれを実測して3Ddata作った方が早い気もする ・・・(;一_一)
正直パテで外装造形してからそれを実測して3Ddata作った方が早い気もする ・・・

9
76
692

Jan 16
2
87

Jan 6
Structure turns data from something you look at into something you can rely on.
#LiDAR #3Ddata #geospatial
3
170

Streamline 3D data selection with PV-SAM! Our #ParaView & LidarView plugin uses @Meta Segment Anything Model to make interactive segmentation faster, precise, and more intuitive, perfect for #LiDAR, medical imaging, and industrial inspection.
Read more: ow.ly/pv3Y50XGhWp
#3DData #ParaViewPlugin #TechInnovation
3
141

Roads, bridges, and large assets are captured in full 3D while driving.
The Leica Pegasus TRK is redefining mobile mapping with AI-driven LiDAR, precision imaging, and fast digital twin creation.
Learn more: sitml.com/product-category/s…
#LeicaPegasusTRK #MobileMapping #LiDAR #3DData

1
3
37

3 Dec 2025
Parking lots are actually harder than highways for autonomous vehicles.
No joke.
Highways are clean and predictable.
Parking lots are chaos in a box.
If an AV can’t handle parking lots, it can’t handle reality.
#ROVRNetwork #AutonomousVehicles #AI #3DData
4
1
15
379
2 Dec 2025
City nights are messy! Think glare, shadows, headlights, reflections, motion everywhere. 🌃🚗✨
That’s why we built the TarantulaX to shine in low-light environments.
It captures clean data and accurate depth even under the most chaotic night traffic.
Real autonomy needs real-world conditions.
The TX handles them.
#ROVRNetwork #TarantulaX #NightData #3DData #AI
5
1
17
366
2 Dec 2025
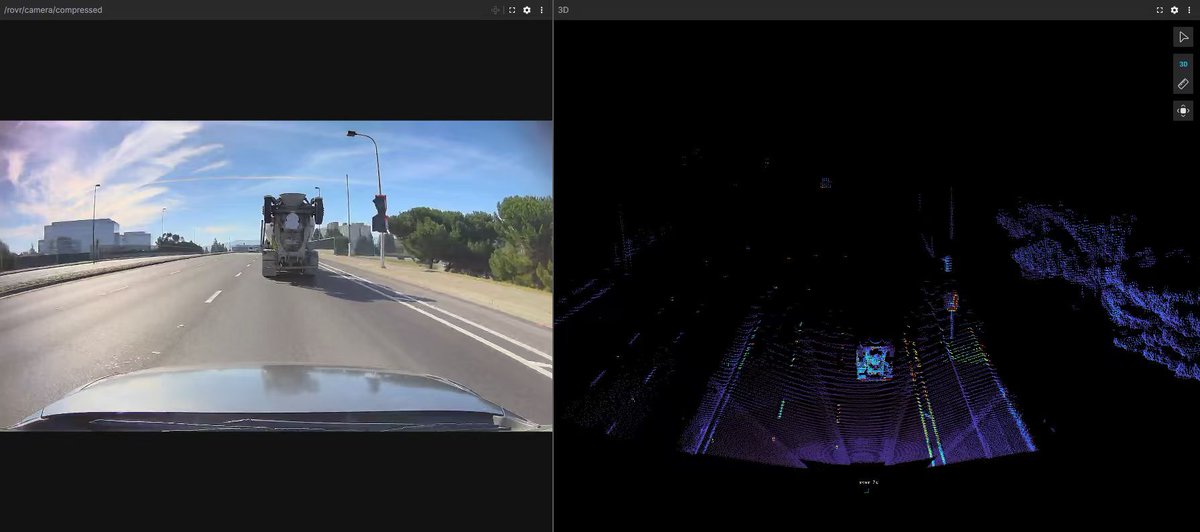
Sensor fusion sounds complicated, but here’s the simple version:
No single sensor sees the full truth.
Cameras see color texture.
LiDAR sees shape distance.
GNSS IMU see position motion.
Sensor fusion combines them into one accurate view of the world! The backbone of a reliable world model.
This is the stack ROVR is collecting data for.
#ROVRNetwork #SensorFusion #WorldModel #3DData
1
1
14
418
30 Nov 2025
Most autonomous driving datasets come from “perfect conditions.” But the real world isn’t perfect — and that’s why non-standard vehicle data is critical. 🚗⚡
Driving data from unusual setups, unique vehicle types, different heights, and diverse sensor placements helps AV models learn to handle:
🔹 different blind spots
🔹 unusual reflections shadows
🔹 varied camera angles
🔹 non-ideal sensor mounting
🔹 real-world imperfections
The world isn’t standardized
Vehicles aren’t standardized
Training data shouldn’t be either!
Non-standard data makes autonomous systems safer, more adaptable, and more prepared for what can happen on real roads. 🌍
#ROVRNetwork #WorldModel #AutonomousVehicles #AI #SensorFusion #3DData
2
3
24
731
29 Nov 2025
Seasonal data is essential and fall brings challenges the LightCone must learn from. 🍁🌐
When leaves start covering the ground, everything changes:
🔸 road markings get hidden
🔸 textures become uneven
🔸 traction zones shift
🔸 colors blend together
🔸 shadows become more complex
These conditions push perception systems harder than almost any other season.
Capturing data through fall helps the LightCone understand how roads look when they’re covered in leaves, layered in color, and constantly changing.
Every season teaches the world model something new 🍂✨
#ROVRNetwork #LightCone #LiDAR #3DData #WorldModel #AutonomousVehicles #AI #Robotics
1
1
20
666
29 Nov 2025
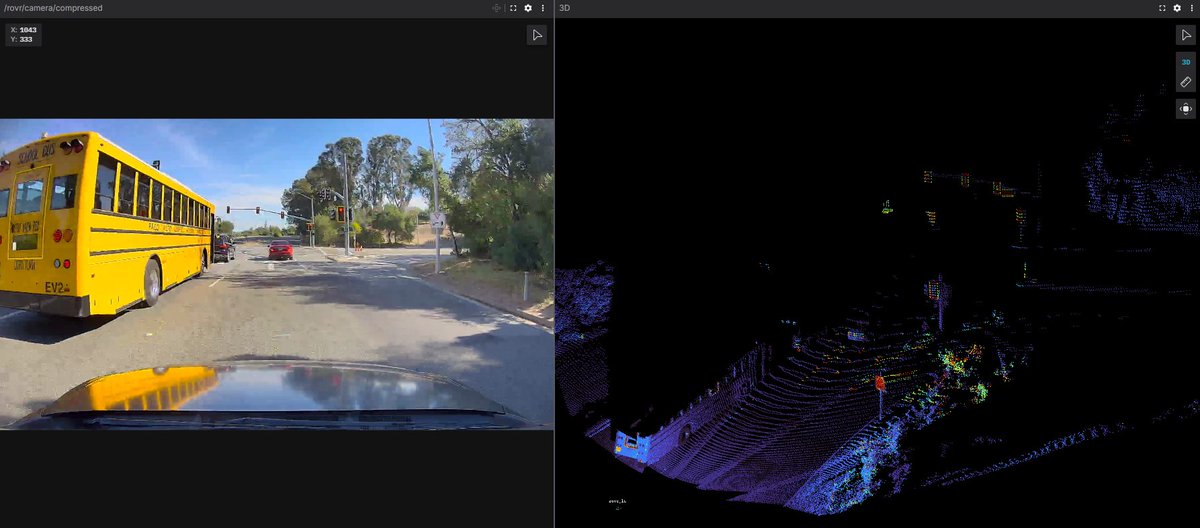
School buses are one of the most important, and most challenging, vehicles for autonomous systems to understand. 🚌⚠️
They have:
🔸 unique shapes sizes
🔸 different stopping patterns
🔸 flashing lights
🔸 extended stop signs
🔸 children crossing unpredictably
🔸 strict legal right-of-way rules
Most AV datasets barely include them, but they’re everywhere in the real world! 🌍
Collecting school bus data helps world models learn how to:
✔ identify buses from all angles
✔ react correctly to stop signals
✔ predict loading/unloading behavior
✔ recognize children near the road
✔ follow safety laws that vary by state
If AVs are going to be safe for everyone, they must understand school buses better!
#ROVRNetwork #AutonomousVehicles #AI #WorldModel #Safety #3DData
3
16
670