
Jun 8
New tutorial | Monocular depth estimation with Depth Anything v3 🌊
Learn how to generate depth maps from a single RGB image or video frame and explore real-world applications in robotics, navigation, & AR/VR.
Watch here ➡️ bit.ly/4vqCGO7
#Ultralytics #DepthEstimation #ComputerVision

1
10
692

Mar 30
🚨 2D fotoğraflardan **metrik olarak doğru 3D veri** çıkarmak artık çok daha basit ve hassas hâle geldi! 🔥
Princeton Vision & Learning Lab’tan yeni bir yöntem: **ZEDD**
Focus stack (farklı odak noktalarındaki birden fazla fotoğraf) kullanarak 2D görüntülerden 3D derinlik bilgisi üretiyor.
### ZEDD’in öne çıkan üstünlükleri:
• DepthPro’ya göre **U daha yüksek doğruluk** (ZEDD benchmark’ında)
• Sadece **2 kare** ile çalışabiliyor
• ViT-B backbone DPT decoder mimarisi
• Özel donanım veya lidar’a gerek yok
Bu gelişme, özellikle mobil cihazlar, drone’lar, AR/VR ve robotik uygulamalar için büyük bir sıçrama anlamına geliyor.
🔗 GitHub: github.com/princeton-vl/FOSS…
Sizce ZEDD, 3D modelleme ve derinlik algılama dünyasını nasıl değiştirecek?
Mobil fotoğrafçılıkta mı, robotikte mi, yoksa AR uygulamalarında mı en büyük etkiyi yaratacak?
Yorumlarda düşüncelerinizi paylaşın, en yaratıcı kullanım alanlarını birlikte keşfedelim! 📸➡️3️⃣
#ZEDD #3DReconstruction #FocusStack #DepthEstimation #PrincetonVL #AI #ComputerVision #YapayZeka #3DModeling #ARVR
4
486

Jan 27
Very excited to share our first public release after I joined @robbyant_brain!
We present Lingbot-Depth 👀 — a state-of-the-art depth foundation model trained with RGB-D MAE on millions of real & simulated RGBD pairs.
🔹 Camera depths as natural masks for RGB-D MAE modeling
🔹 Large-scale real sim RGBD data curation pipeline
What surprised us most:
✨ Significant improvement on transparent, reflective surfaces, and thin structures — traditionally the hardest cases for depth models.
👇These are some of hard causal-capture images we tested on. The results are pretty good!
#DepthEstimation #FoundationModels #EmbodiedAI #3DVision #Robotics #RobbyAnt
10
49
380
22,589

Jan 27
Takeaway:
Masked Depth Modeling turns missing depth into supervision, producing
strong depth priors that generalize across perception and robotics tasks.
Model: huggingface.co/robbyant/ling…
Code: github.com/Robbyant/lingbot-…
• • Tech Report: github.com/Robbyant/lingbot-…
#CVPR2025 #DepthEstimation #RGBD #Robotics
6
238
6 Nov 2025
New tutorial | Depth estimation with MiDaS by Intel Labs
See how AI perceives distance with monocular depth, run demos, visualize results & perform real-time webcam inference.
Watch here ➡️ ow.ly/krmY50Xn35m
#DepthEstimation #MachineLearning

1
10
399

22 Oct 2025
📢 Happening now! @gene_ch0u, @wenqi_xian, @stevenygd, and @realNingYu are presenting FlashDepth: Real-time Streaming Video Depth Estimation at 2K Resolution, at #ICCV2025.
[Poster] 🗓️ Today (Tue, Oct 21) | 🕑 3-5pm HST | 📍 Hawaii Convention Center ExHall II Poster 433
👋 To continue our research momentum, Eyeline Labs is hiring research interns — flexible in time, location, and focus. We publish and open-source, aiming to raise the bar together on next-gen AI filmmaking tools.
Fall’25/Spring’26: jobs.lever.co/Eyeline/4eded8…
Summer’26: jobs.lever.co/Eyeline/85f377…
#AI #AIResearch #AIGC #GenAI #ComputerVision #MachineLearning #DepthEstimation #Internship #hiring
27 Jun 2025

🔊 #ICCV2025 acceptance: ⚡FlashDepth⚡ estimates accurate and consistent depth for 2K-resolution videos in a real-time (24 FPS) streaming fashion on a single A100 GPU.
✊ Kudos to the teamwork led by our intern @gene_ch0u at @eyelinestudios .
👉 Join us to be the next one empowering #filmmaking with #AI:
Fall 2025/Spring 2026 internship: jobs.lever.co/scanlinevfx/4e…
Summer 2026 internship: jobs.lever.co/scanlinevfx/85…
#hiring #internship #AI #AIResearch #MachineLearning #AIGC #ComputerVision

2
5
56
7,096

1 Jul 2025
🎉 Congrats on DAC and the CVPR’25 acceptance!
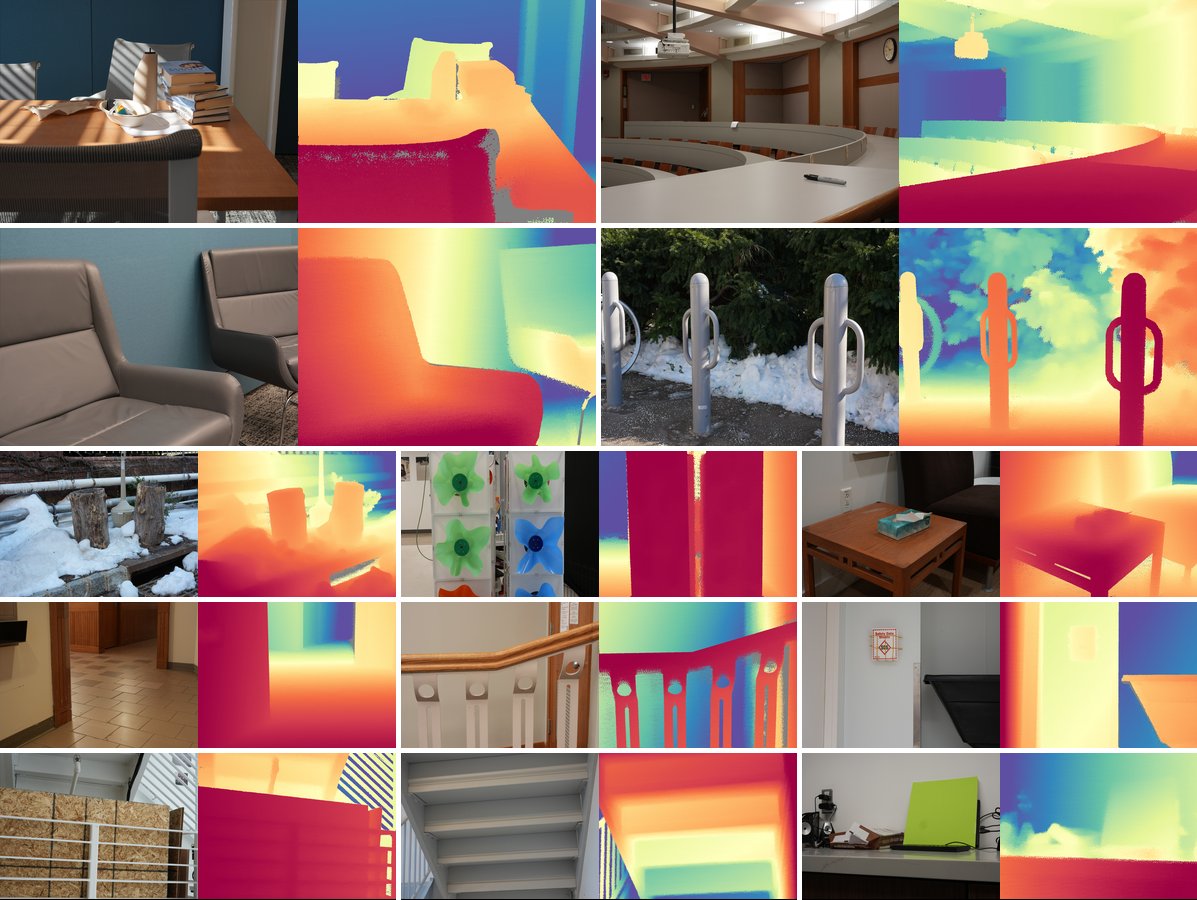
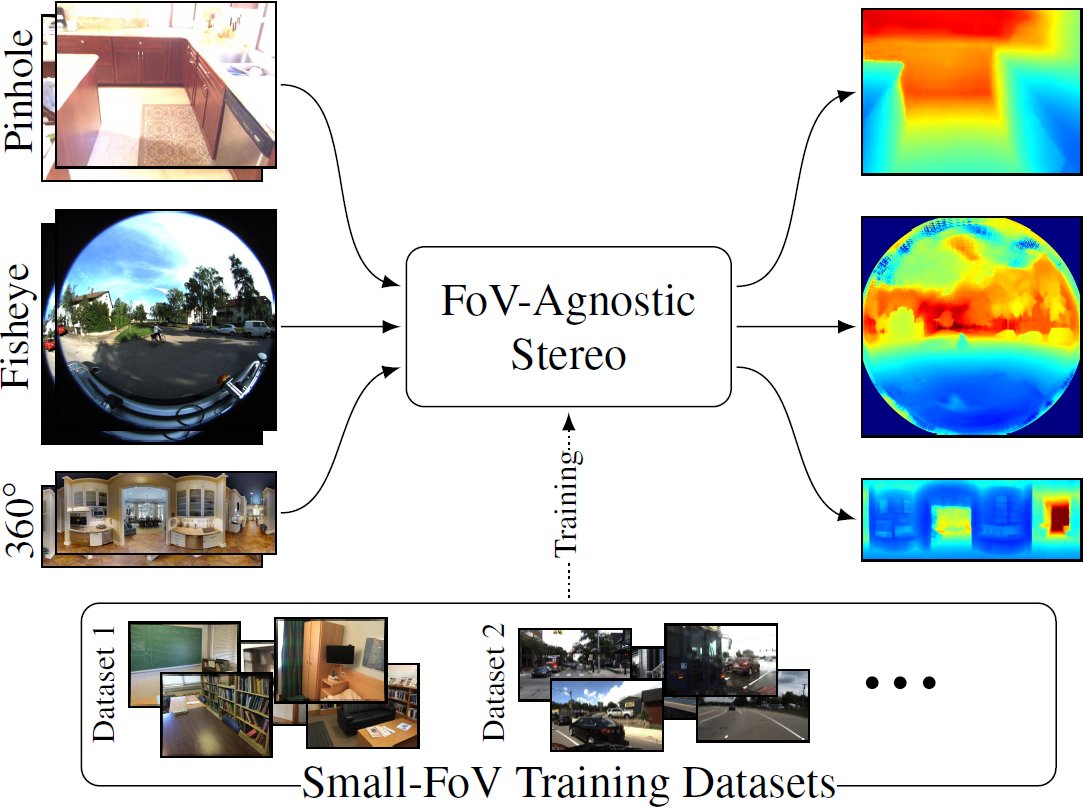
We explored a similar idea for stereo in FoVA-Depth (3DV’24 oral):
📌 Warp pinhole to canonical ERP to generalize across camera models.
Glad to see this working in monocular too!
📄 Project: research.nvidia.com/labs/lpr…
💻 Code: github.com/NVlabs/fova-depth
🧵 Original tweet: x.com/daniel_lichy/status/18…
#CVPR2025 #DepthEstimation #360Images
13 Mar 2025

🎉 We’re excited to announce our paper Depth Any Camera (DAC), accepted to 𝗖𝗩𝗣𝗥 𝟮𝟬𝟮𝟱! 🚀
Along with this, we have a few exciting updates!
To support NeRF & Gaussian Splatting on fisheye inputs, we now provide DAC’s depth estimation results for #ZipNeRF on fisheye images.
📥 Download depth maps:
🔗 yuliangguo.github.io/depth-a…
Methods like #SMERF, #FisheyeGS, & #EVER can leverage this fisheye depth prior!
#CVPR2025 #NeRF #GaussianSplatting #3DReconstruction #ComputerVision
1
1
7
633

16 Jun 2025
Fine-tuned DepthAnythingV2 using real-world ROVR data — in collaboration with leading global startups and research labs.
📷 Left: original image
📊 Right: depth prediction after fine-tuning
📈 Huge accuracy boost:
d1: 0.2348 → 0.6894
abs_rel: 0.9753 → 0.2793
log10: ∞ → 0.2263
silog: NaN → 1.0851
✅ Real 3D data changes everything.
🌍 This is just the beginning — ROVR is building the world’s largest open 3D dataset.
More AI breakthroughs coming soon.
#ROVR #LiDAR #AI #DepthEstimation #DePIN #ComputerVision #OpenSourceAI

7
27
1,065

21 Apr 2025
Introducing AIRPHA by AquaAge – a drone platform that uses depth estimation for autonomous indoor navigation.
No LiDAR needed. Just AI and smart perception.
youtube.com/watch?v=AfAWn8qB…
#DroneTech #AIRPHA #IndoorFlight #DepthEstimation #AI #AquaAge
1
5
442

11 Mar 2025
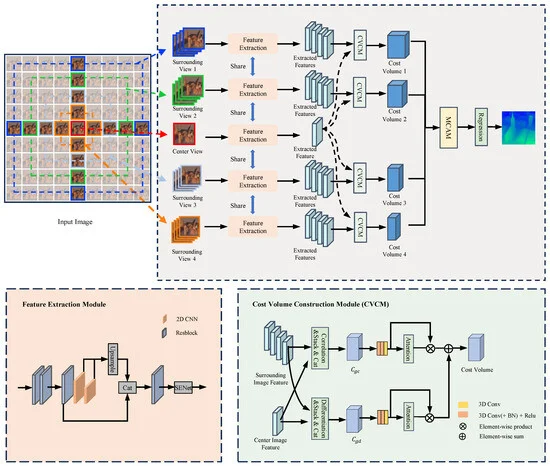
Efficiency–Accuracy Trade-Off in Light Field Estimation with Cost Volume Construction and Aggregation
mdpi.com/1424-8220/24/11/358…
#depthestimation #convolutionneuralnetwork
2
84

3 Mar 2025
📢"Prompting Depth Anything for 4K Resolution Accurate Metric Depth Estimation"
Key Highlights:
✅Foundation Model LiDAR Prompts: Introduces a prompt fusion framework leveraging low-cost LiDAR data to guide a Depth Anything foundation model, achieving metric-accurate depth estimation at 4K resolution.
✅Multi-Scale Prompt Fusion: Integrates LiDAR signals at multiple scales within the decoder, enhancing depth estimation across diverse scenes and resolutions.
✅Scalable Data Pipeline: Proposes a synthetic LiDAR simulation and pseudo ground truth generation strategy to compensate for the lack of high-quality real-world paired datasets.
✅SOTA Performance: Outperforms existing monocular depth estimation approaches on ARKitScenes and ScanNet , setting new benchmarks for accuracy and generalization.
✅Real-World Applications: Demonstrates impact on 3D reconstruction, robotic grasping, and AR/VR applications, ensuring scale-consistent metric depth for downstream tasks.
---
Paper: arxiv.org/abs/2412.14015
Project Page: promptda.github.io/
Github: github.com/DepthAnything/Pro…
----
Related articles from LearnOpenCV:
1. Metric Depth with Depth Pro: learnopencv.com/depth-pro-mo…
2. Monocular Depth Estimation - Depth Anything: learnopencv.com/depth-anythi…
3. Disparity Estimation using Deep Learning: learnopencv.com/disparity-es…
----
#MonocularDepth #DepthEstimation #DepthAnything #ByteDance #FoundationalModel
1
12
111
6,955
12 Dec 2024
Expanding Sparse Radar Depth Based on Joint Bilateral Filter for Radar-Guided Monocular Depth Estimation
mdpi.com/1424-8220/24/6/1864
#depthestimation #multimodality #radar
3
108

30 Oct 2024
🌟Breaking News!
🎉 Excited to announce that our paper, “A Unified Monocular Vision-Based Driving Model for Autonomous Vehicles with Multi-Task Capabilities,” has been accepted in IEEE Transactions on Intelligent Vehicles (T-IV)! 🚗👀
@salimazak , @ffbozkaya, Ş. Tığlıoğlu, A. Yusefi, and A. Durdu
📄 DOI: 10.1109/TIV.2024.3483114
📊 Journal Impact Factor (2023): 14.0
🏆 Top Journal Rankings:
#ComputerScience, #ArtificialIntelligence: 5/197
#Engineering, #ElectricalandElectronic: 5/353
#TransportationScienceTechnology: 2/72
@KtunRacLab🙏
URL: ieeexplore.ieee.org/document…
#AutonomousDriving #SelfDriving #ComputerVision #Monocular #SensorFusion #IEEE #LSTM #DepthEstimation #Transactions #IntelligentVehicles
6
270
21 Oct 2024
"DEPTH PRO: SHARP MONOCULAR METRIC DEPTH IN LESS THAN A SECOND" @alexeyab84
Apple introduces Depth Pro, a revolutionary model for zero-shot metric monocular depth estimation, setting new standards in speed, precision, and versatility. This research paves the way for highly efficient and accurate depth estimation across various real-world applications.
Key Highlights:
✅ High-resolution depth maps: Depth Pro produces exceptionally sharp 2.25-megapixel depth maps with detailed boundary tracing, even for challenging features like hair and fine structures.
✅ Incredibly fast performance: With a processing time of less than 0.3 seconds, Depth Pro is perfect for real-time applications, delivering fast, high-quality results.
✅ Zero-shot adaptability: It works without requiring any camera metadata, producing metric depth maps with absolute scale for any image, making it highly adaptable across different scenarios.
✅ Multi-scale Vision Transformer architecture: Depth Pro uses an advanced ViT-based design to balance global image context with fine-grained details, ensuring both accuracy and efficiency.
✅ Improved boundary tracing: By using real-world and synthetic datasets during training, Depth Pro excels in tracing boundaries and maintaining sharpness, significantly reducing visual artifacts like “flying pixels.”
Compared to models like Marigold and DepthAnything v2, Depth Pro delivers faster and sharper depth maps. While Marigold produces detailed boundaries, it is far slower in performance.
Depth Pro not only offers superior sharpness in boundary precision but also achieves this at a fraction of the time, making it ideal for interactive applications like 3D photography and novel view synthesis.Depth Pro redefines what's possible in depth estimation, opening new doors for real-time image editing and rendering.
Project Page: arxiv.org/abs/2410.02073
Paper: arxiv.org/abs/2410.02073
Github: github.com/apple/ml-depth-pr…
#DepthEstimation #AIResearch #VisionTransformers #ComputerVision #AppleResearch #3DPhotography #MonocularDepth #DeepLearning #RealTimeDepth #NovelViewSynthesis #ImageProcessing
1
1
6
295

12 Oct 2024
New video is up about metric depth estimation combined with the new YOLO11 model from @ultralytics
In this video we are going to take a look at how to estimate real distances to objects with just a single camera or image and YOLO11. We are going to use the new depth pro model from apple which is used for metric depth estimation. We then combine the depth map with object detections from YOLO11. In just a few lines of code you can estimate the distance to objects.
#yolo11 #objectdetection #depth #depthestimation #metricdepth #ai
1
9
552

28 Sep 2024
💬𝐌𝐞𝐭𝐚 𝐛𝐮𝐢𝐥𝐝𝐬 𝐭𝐡𝐞 𝐛𝐫𝐢𝐝𝐠𝐞 𝐭𝐨 𝐦𝐞𝐭𝐚𝐯𝐞𝐫𝐬𝐞 🚀
Cr. Meta via Ahsen Khaliq
#ai #foundationHumanModel #meta #segmentation #depthEstimation
1
1,053

7 Sep 2024
4/25 Foundation Model for Robotic Endoscopic Surgery
This paper presents Depth Anything in Robotic Endoscopic Surgery (DARES), which introduces Vector-LoRA, a new adaptation technique for self-supervised monocular depth estimation in robotic-assisted surgery (RAS).
#SurgicalRobotics #DepthEstimation #AI
x.com/OpenlifesciAI/status/1…
3 Sep 2024

🚨 Medical AI Research alert! 🚨
Can foundation models revolutionize depth estimation in robotic surgery?
DARES: Depth Anything in Robotic Endoscopic Surgery with Self-supervised Vector-LoRA of the Foundation Model by researchers from @ucl
Authors (Mona Sheikh Zeinoddin, ..., @ElenaDeMomi, @SophiaBano, @MGrechSollars, @emazomenos, @fishpiechicken, @DanStoyanov, @MattClarksonUCL, @MobarakolI)
Here's why it's exciting: 1/8 👇🧵
#Radiology #KnowledgeGraphs #MedicalAI #NLP #AI #Bioinformatics #GenAI #MachineLearning #HealthTech #Medical #LLM #GPT #Healthcare #pubmed #arxiv #vision #nlp #research #pathology #ClinicalTrials #stanford #robotics #roboticsurgery

1
2
398

5 Aug 2024
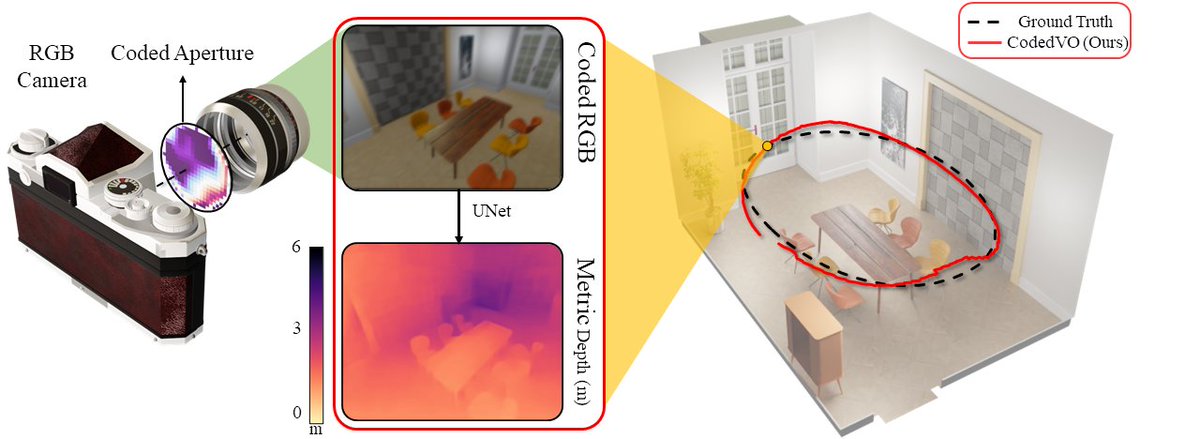
👁 How can the field of robotics leverage different eye apertures in nature?👁
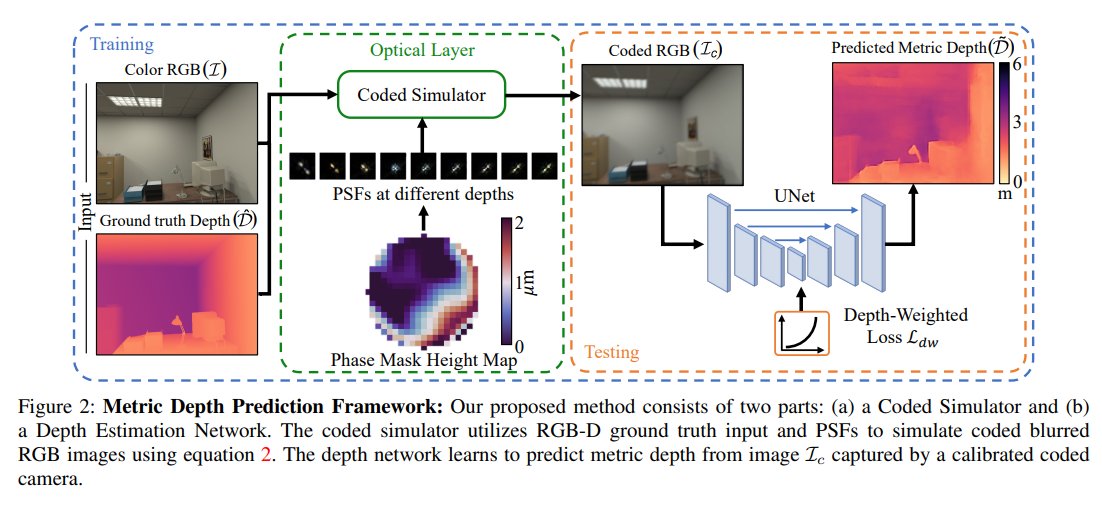
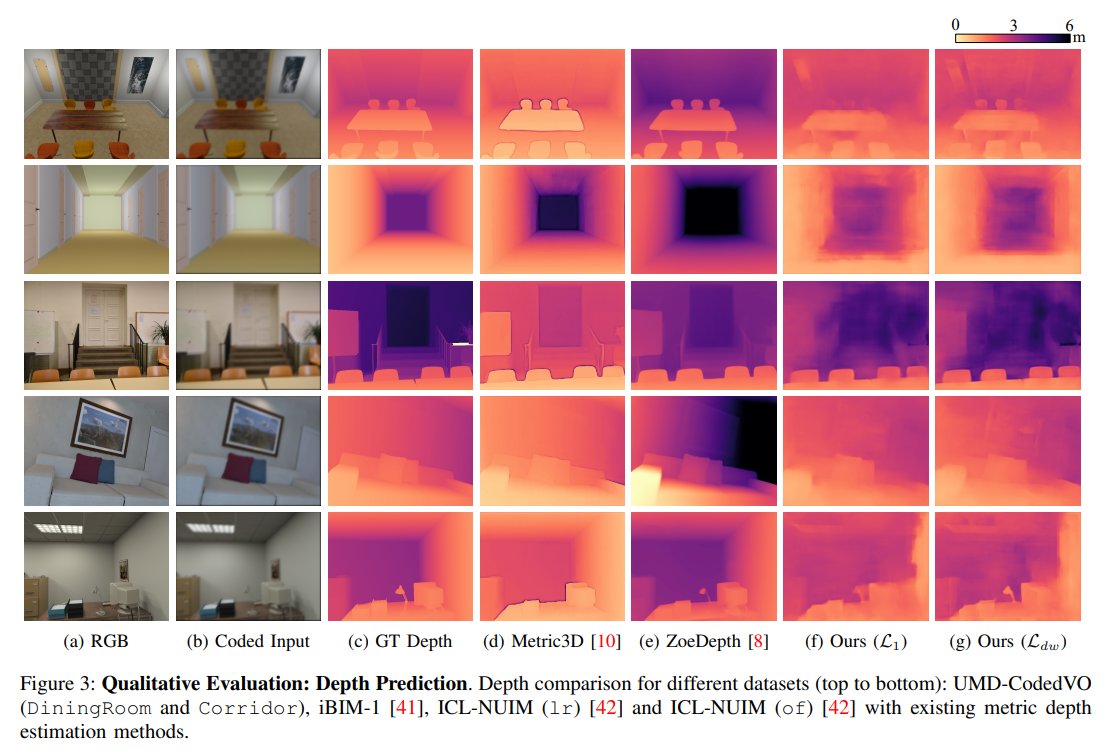
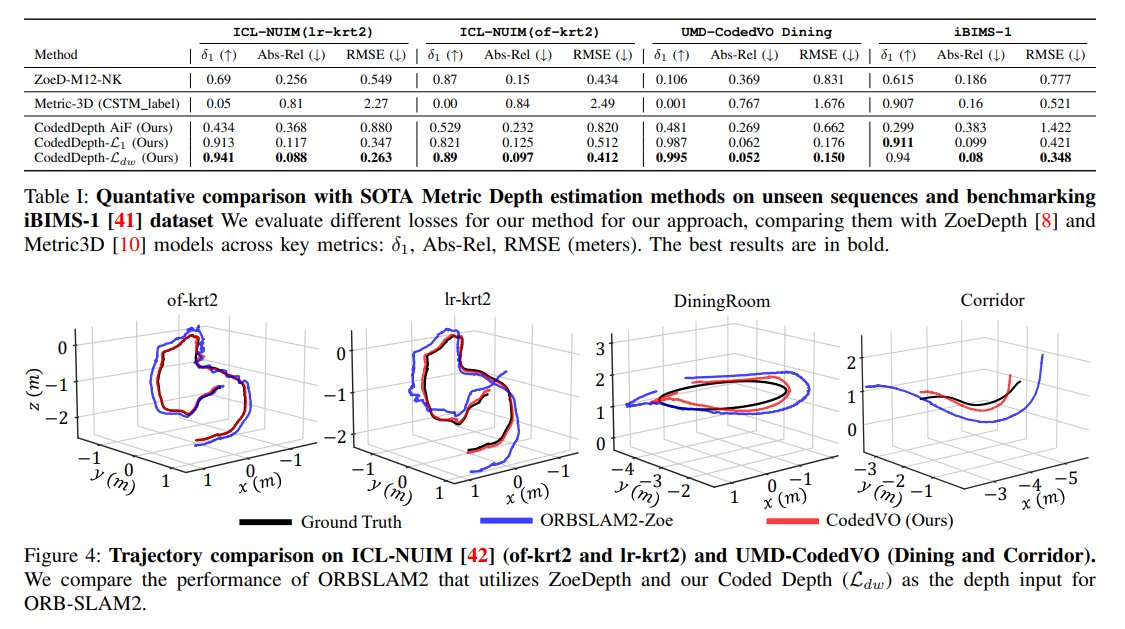
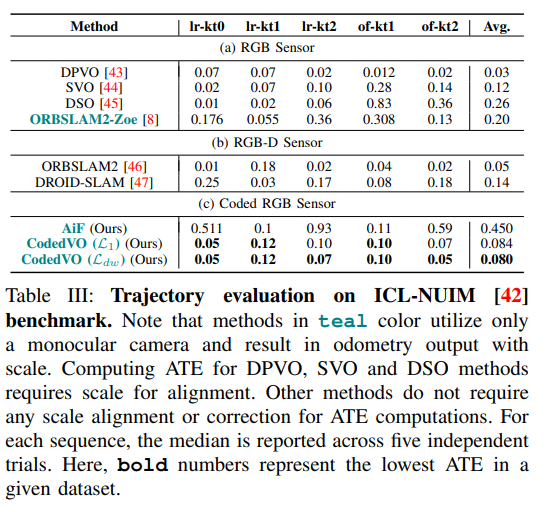
🤖 As my first post as a faculty at the University of Colorado Boulder, we introduce #CodedVO: Coded Visual Odometry. (Published in #IEEE #RAL Journal)
🌟 Key Highlights:
🥇 A novel monocular visual odometry method
🥈 Leverages optical constraints from coded apertures to resolve scale ambiguity.
🥉 By integrating RGB and predicted metric depth using optical constraints, we achieve state-of-the-art performance in monocular visual odometry with a known scale in indoor scenes.
#Robotics #VisualOdometry #ComputerVision #DepthEstimation #ComputationalImaging #UMD #ICRA40 #IEEE #RAL
26 Jul 2024

CodedVO: Coded Visual Odometry
Sachin Shah, @naitri_r, @chahatdeep, Christopher Metzler, @YAloimonos
tl;dr: RGB->coded aperture->metric dense depth->VO
arxiv.org/pdf/2407.18240
1
1
9
1,266

30 Jul 2024
🚀 Announcing CodedVO: A Leap in Monocular Visual Odometry! 🌟
📰 Excited to share our research, "Coded Visual Odometry: CodedVO," which has been accepted in IEEE RAL Journal and will be presented at ICRA40!
#Robotics #VisualOdometry #ComputerVision #DepthEstimation #ComputationalImaging #UMD #ICRA40 #IEEE #RAL
1
1
5
1,229
22 Jul 2024
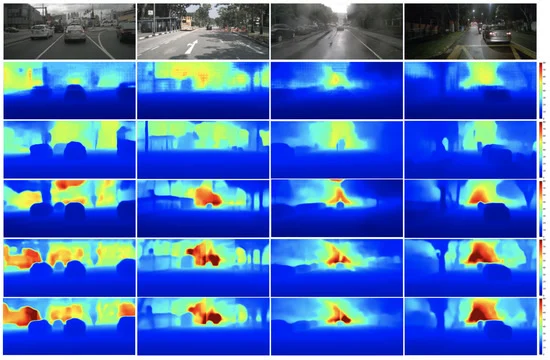
Monday’s research paper
This study tackles the challenge of estimating depth using monocular vision for moving objects in outdoor scenes using a self-supervised approach. By introducing a new training strategy that leverages the ground contact prior, the authors enhance depth estimation accuracy.
Their method shows significant improvements on Cityscapes and KITTI datasets, particularly for moving objects.
Authors: Jaeho Moon, Juan Luis Gonzalez Bello, Byeongjun Kwon, and Munchurl Kim.
Paper: arxiv.org/abs/2312.10118
Project Page: kaist-viclab.github.io/From_…
#AI #MachineLearning #ComputerVision #DepthEstimation #SelfSupervisedLearning #Research #Cityscapes #KITTI #OpenCV #OpenCVUniversity #MondayResearch #AIResearch
1
10
385