A high-performing team can be undone by one unchecked behaviour. Research shows one toxic mindset can cut team performance by 40%.
Team Re:Script | Leadership is courage in action - choosing to confront what corrodes culture.
zurl.co/y7iRT
#ExperienceLearning

4

Jun 12
A Beginning of Exploration, Passion, and Possibilities
facebook.com/share/p/1BNgith…
#MMSchool #ClubsInAction #ExperientialLearning #StudentDevelopment #SkillBasedEducation #BeyondClassroom #LearningByDoing #FutureReady #HolisticEducation #ExperienceLearning #InspireFutures




Jan 21
Do we REALLY need an external world model? 🤔
Standard approaches often rely on heavy external simulators.
We agree with the view: The Agent itself is the World Model.
🌍 How to align agentic world models via experience learning?
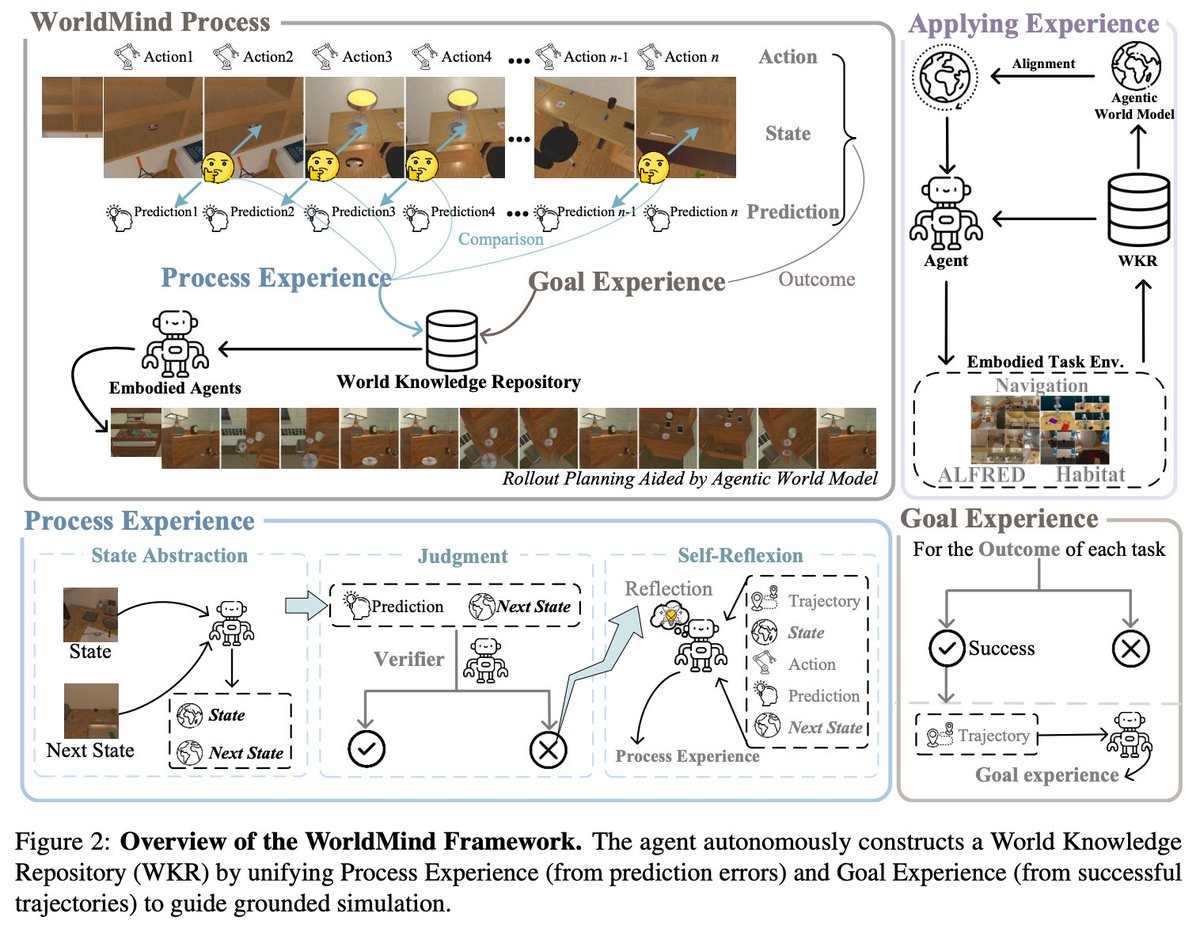
We are excited to introduce our new work: "Aligning Agentic World Models via Knowledgeable Experience Learning"(WorldMind)🚀
🚧The Problem: LLMs possess vast semantic knowledge but lack physical grounding.
→ Ask for a plan: It sounds logical.
→ Execute it: It fails physically (e.g., trying to slice without a knife). 😵💫
The agent knows *what* to do, but not *how* physical laws constrain it.
💡The Solution: WorldMind
We bridge the gap between high-level reasoning and physical reality through:
🌍 Agentic World Model: Instead of external engines, we activate the agent's internal ability to simulate environmental dynamics to guide planning.
🔹 Online Experience Learning: Eliminates the need for costly fine-tuning or retraining.
🔹 Alignment via World Knowledge: Autonomously builds a World Knowledge Repository (WKR) to ground the agent.
This unifies:
• Process Experience: Learning from step-level prediction failures ❌
• Goal Experience: Distilling shortcuts from successful trajectories ✅
🚀 Key Features:
✅ Training-Free: Aligns agents via online experience learning.
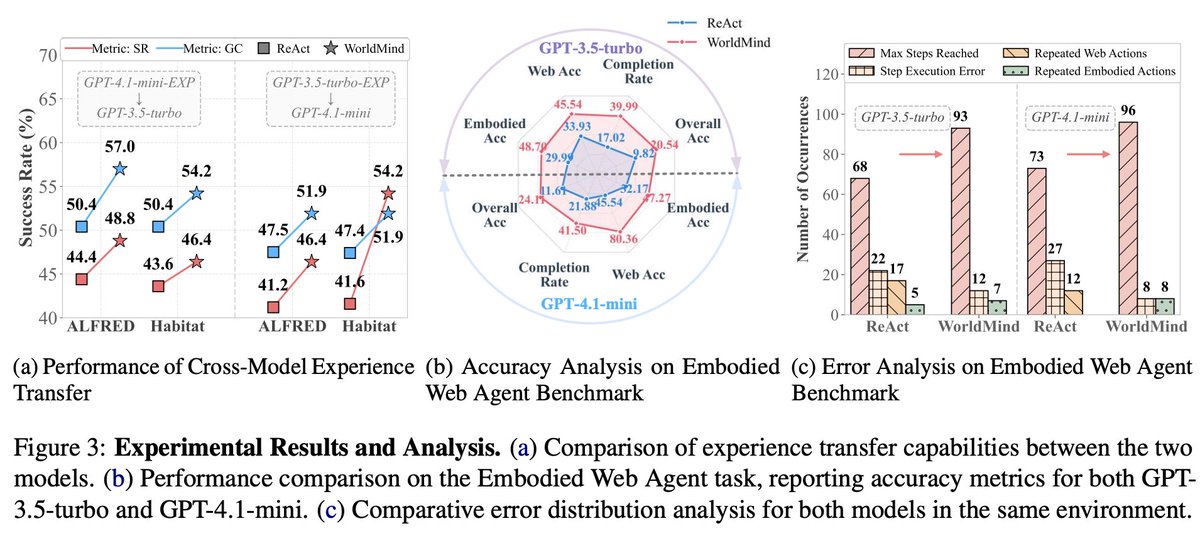
✨ Superior Performance: improvements on EB-ALFRED & EB-Habitat.
🔗 Project Page: zjunlp.github.io/WorldMind/
📄 Paper: huggingface.co/papers/2601.1…
Our current method is limited by today’s foundation models and cannot yet support reliable long-horizon planning.
Looking ahead, as model capacity and memory modules continue to improve, we believe agents will gradually internalize world models and achieve robust long-term embodied decision-making.
#EmbodiedAI #MultimodalAgent #ExperienceLearning #Alignment #WorldModels #LLM #Robotics #AgenticAI #NLP #WorldMind

3
19
111
7,188

11 Dec 2025
The only way to do great work is to love what you do. ~ Quote #Passion #Purpose #Facilitation #BeU
#ExperienceLearning
1
1
2
58

12 Oct 2025
From textbooks to real-world task lists—CertificationPoint helps you bridge the gap.
Complete Work eXperience Builders w/Mentoring In New Jersey -> certificationpoint.org/newje…
#SkillBuilding #FutureOfWork #Innovation #EduTech #LearningBridge #SkillInAction #ExperienceLearning
1
1
2
44

7 Nov 2024
Welcome to Mrs. Ramos’ Cafe, where science and cooking meet to have a fabulous learning experience #experiencelearning #interactivelessons #heattransfer
1
2
112
17 Oct 2024
Success usually comes to those who are too busy to be looking for it. ~ Quote
#ExperienceLearning
2
46
17 Sep 2024
Success usually comes to those who are too busy to be looking for it. ~ Quote
#ExperienceLearning
3
41
17 Aug 2024
Success usually comes to those who are too busy to be looking for it. ~ Quote
#ExperienceLearning
1
2
56
30 Jul 2024
Bison are the only animal that turn into a snowstorm rather than away from it because they instinctively know that walking into the storm will get them out of the weather quicker.
There may be a life lesson for us humans.
#ExperienceLearning
16
23 Jul 2024
‘FEAR’ is the price you have to pay and have to bear for its implications at the cost of life, for getting confined in your own limitations.
#ExperienceLearning
2
16
7 Jul 2024
#Diversity is a western notion that we blindly chase. Our socio-cultural #Ethos is in 'Vasudheva Kutumbakam’, diversity comes naturally to us.
What we struggle with, again because of our socio-cultural fabric is #Inclusion.
We don't know inclusion enough!
#ExperienceLearning
2
31
1 Jul 2024
Thoughts are a powerful thing. Learn how to identify your own #unconscious #bias, and make a conscious choice to work against it.
#BiasCorrect #BreakingBias #UnconsciousBias #Think
#ExperienceLearning

1
2
239
27 Jun 2024
Be grateful for the adversities you face in life, because each experience is uniquely designed - Just For You.
To enlighten your mind and soul.
No matter how painful,
it is worth every bit the lesson,
the reward it holds in store. ~quote
#ExperienceLearning
1
31

24 May 2024
I’m happy to share my third article/post! This one is about experience learning! A huge thank you to Andre Wicks for showcasing the hard work Summers Staff is doing!
Check it out !
#ExperienceLearning #EverydayPrincipal
everydayprincipal.com/post/t…
1
2
1,496
11 May 2024
Winning the “Generation Wars”, Making the Most of Generational Differences and Similarities in the Workplace. Demystifying the Plot!
A Bespoke #ProventusHR Intervention
#Boomers #GenX #Millennials #GenZ #Inclusion #GenerationBias
#ExperienceLearning

2
31
10 May 2024
It takes tremendous integrity & fortitude to utter the words “I was wrong, and I am sorry”.
Admitting You Were Wrong Doesn't Make You Weak -- It Makes You Awesome!
#ExperienceLearning
1
4
140

3 May 2024
"Experience is the best teacher, especially when the lesson is wrapped in excitement and discovery." #ahlconintl Prep A kids turn #learning into an adventure thru exciting #activities @ashokkp @y_sanjay @pntduggal @ShandilyaPooja @KakoliLogani @TanuMathur10 #ExperienceLearning
1
5
24
527
15 Apr 2024
I’m just human, I have weaknesses, I make mistakes and I experience sadness; But I learn from all these things to make me a better person.
I AM, THEREFORE I AM!!
#ExperienceLearning
2
14
5 Apr 2024
I, not events, have the power to make me happy or unhappy today. I can choose which it shall be.
Yesterday is dead, tomorrow hasn’t arrived yet. I have just one day, today, and I’m going to be happy in it.
#ExperienceLearning
1
2
29