From Flight Data to Future Capability
AFTPS Flight Test Engineer showcased an indigenous concept for automated manoeuvre extraction and analysis at SFTE Symposium 2026, Berlin—opening new possibilities in rotary-wing flight testing.
#IAF #AFTPS #FlightTesting #AtmanirbharBharat


2
12
451

Risk Management e Safety Culture nelle attività di Flight Testing #PhDAER #DAERseminar
🗓 15 giu · 14:30
📍Sala Consiglio #DAER
🗣Paolo Chimetto, già Safety Manager presso Leonardo Aeronautics Division e docente #DAER @polimi
👉aero.polimi.it/it/magazine/i…
#FlightTesting #Aviation

44

इंडिगो की मेगा टेस्ट फ्लाइट सफल! दो लैंडिंग-टेकऑफ के साथ एयरपोर्ट इंफ्रास्ट्रक्चर की हुई जांच ! Hnn24x7
#IndiGo #TestFlight #AirportTrial #AirportInfrastructure #ILS #RNP #AviationNews #AirportOperations #FlightTesting #CivilAviation #IndiGoAirlines #RunwayTest #LandingTakeoff #AirportUpdate #IndiaAviation #BreakingNews #LatestNews #AirTravel #HNN24X7 #AirportReady
38
𝐄𝐯𝐞 𝐀𝐝𝐯𝐚𝐧𝐜𝐞𝐬 𝐞𝐕𝐓𝐎𝐋 𝐏𝐫𝐨𝐠𝐫𝐚𝐦 𝐰𝐢𝐭𝐡 𝐒𝐮𝐜𝐜𝐞𝐬𝐬𝐟𝐮𝐥 𝐇𝐨𝐯𝐞𝐫 & 𝐋𝐨𝐰-𝐒𝐩𝐞𝐞𝐝 𝐅𝐥𝐢𝐠𝐡𝐭 𝐓𝐞𝐬𝐭𝐬 🇧🇷✈️
Eve Air Mobility has successfully completed the hover and low-speed flight testing phase of its full-scale eVTOL engineering prototype, marking another key milestone in the company’s advanced air mobility program.
The completed test block provided valuable real-world flight data to validate aircraft behavior, control laws, and simulation models as Eve moves toward transition flight testing. The company stated that its step-by-step flight envelope expansion approach is helping strengthen the technical foundation of the eVTOL platform ahead of more advanced testing phases.
#EveAirMobility #eVTOL #AdvancedAirMobility #UrbanAirMobility #Aerospace #FlightTesting #FutureOfFlight

1
1
7
799

May 19
#IndianAirForce extends heartiest congratulations to Gp Capt K K Venugopal (retd) on becoming the first Indian test pilot to be elected as a Fellow of the Society of Experimental Test Pilots.
A proud moment for India’s aerospace and flight testing fraternity.
#HAL #TestPilot #FlightTesting #Aerospace #Aviation #MakeInIndia #AtmanirbharBharat #IndianAerospace
@DefenceMinIndia
@SpokespersonMoD
@HQ_IDS_India
@adgpi
@indiannavy
@CareerinIAF
@HALHQBLR

Hindustan Aeronautics Limited (HAL) is proud to announce that Gp Capt K K Venugopal, Executive Director & Chief Test Pilot (Fixed Wing), HAL has been elected as a Fellow of the Society of Experimental Test Pilots (SETP). He is the first Indian test pilot to attain this grade.

ALT Gp Capt K K Venugopal, Executive Director & Chief Test Pilot (Fixed Wing), HAL has been elected as a Fellow of the Society of Experimental Test Pilots (SETP)
31
145
1,182
36,844

Apr 29
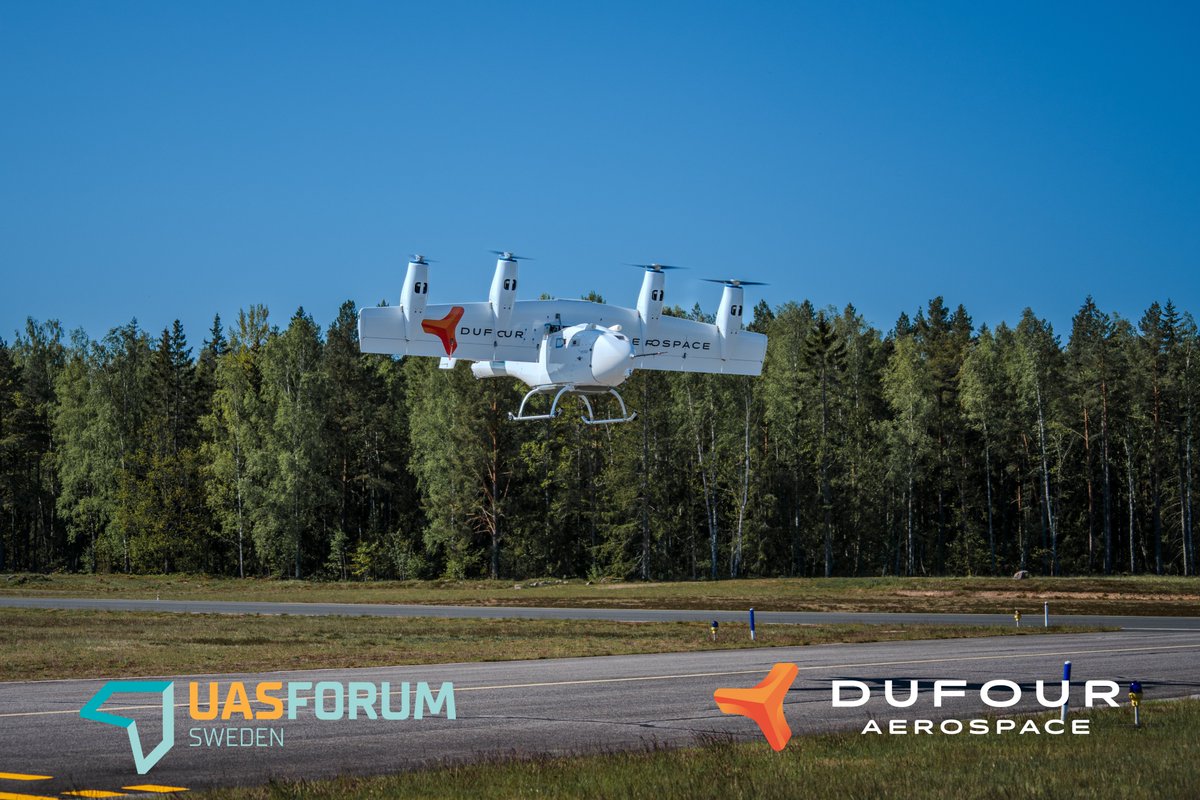
Dufour Aerospace will be attending the UAS Forum 2026 on May 6–7 in Västervik, Sweden, together with @Savback Helicopters.
At the Västervik Drone Science Park, we will be on-site with the Aero-200, featuring planned flight demonstrations as part of the event. Together with Savback Helicopters, we will engage with partners and stakeholders in discussions around the aircraft and its applications.
The forum offers an excellent opportunity to see the Aero-200 in action and to connect directly with the teams driving its development and future deployment. If you are attending the UAS Forum, we look forward to meeting you.
More updates will follow from Västervik.
Learn more about the Aero-200 platform: dufour.aero/aero-200
#Aero200 #UASForum #Aviation #DroneTechnology #UAS #FlightTesting #AdvancedAirMobility #DufourAerospace
1
3
93
Apr 28
At Dufour Aerospace, we recently completed a full flight from takeoff to landing using our Unified Velocity Controller (UVC) with GNSS denied.
In most drone systems, losing GNSS means losing reliable position and velocity estimates. This typically leads to degraded flight performance, increased pilot workload, or mission interruption.
During this flight, the Aero-30 maintained stable control throughout, including transitions between hover and forward flight, without requiring GNSS data for stable flight control.
To achieve this, the system combines multiple onboard data sources, including wing-tilt sensors and visual odometry, which estimates movement by analysing camera images, to maintain accurate airspeed and ground speed even when GNSS is unavailable.
From an operational perspective, this directly addresses a key limitation in current drone operations:
• Missions can continue in GNSS-denied environments instead of being aborted
• Hover and transitions remain stable without external positioning
• Pilot intervention is reduced during critical phases of flight
This is particularly relevant for operations in urban areas, mountainous terrain, or environments where GNSS signals are unreliable or intentionally disrupted. This is a step toward systems that can operate consistently in real-world conditions, not just ideal ones.
If you are working in environments where GNSS is not guaranteed, learn more: dufour.aero
#eVTOL #AAM #AerospaceEngineering #FlightTesting #AutonomousFlight #DroneTechnology #DufourAerospace

1
4
5
447
Apr 24
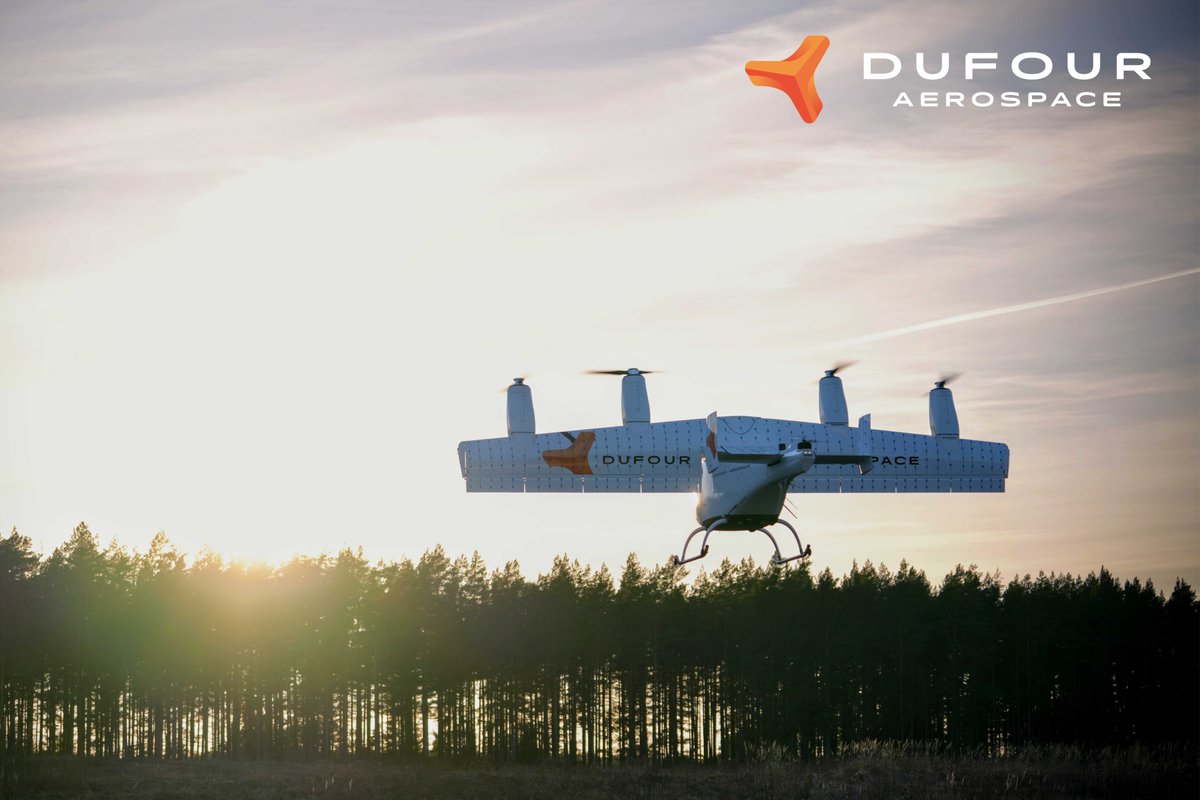
Another Aero-200 has rolled off the production line, further strengthening the fleet as we continue to scale toward real-world operations.
At the end of last week, this Aero-200 successfully completed its full transition flight, becoming the eighth full-scale prototype to fly through the complete transition between hover and forward flight. With multiple Aero-200’s now consistently executing full mission profiles, the focus shifts from individual performance to repeatability across the fleet.
This is where operational capability is defined. Real missions depend on availability, scheduling, and predictable behaviour across multiple aircraft.
The Aero-200 will be used for upcoming long-range missions, including the demonstration of the 20 kg over 200 km profile, where consistency across platforms becomes a requirement, not an objective.
As the fleet expands, flight capacity increases, and validation cycles accelerate, supporting the transition from flight testing to operational deployment.
Learn more about the Aero-200 platform:dufour.aero
#Aero200 #Aviation #DroneTechnology #UAS #FlightTesting #AdvancedAirMobility #DufourAerospace

1
4
127
Apr 21
During recent test activities in Västervik, Sweden, the Aero-200 completed extended flight missions, with the longest flight reaching 1 hour and 37 minutes, covering a distance of up to 170 km.
For operators, this directly impacts how missions can be executed:
• Larger areas can be covered in a single operation due to longer, stable flight endurance
• Fewer launch sites and repositioning steps are required
• Longer routes can be completed in one mission
• Missions become more feasible in logistics, inspection, and remote operations
These results bring the platform closer to its target mission profile of 20 kg over 200 km, moving from testing toward practical operational capability.
Testing continues in Sweden as we further expand range, endurance, and overall system reliability.
Learn more about the Aero-200 platform: dufour.aero/aero-200
#Aero200 #Aviation #DroneTechnology #UAS #FlightTesting #AdvancedAirMobility #DufourAerospace
1
4
164

Mar 10
Innovation in the air at #VERTICON2026! 🚁
Great to catch up with Monty Jackson, at the DEWESoft booth today in Atlanta. If you’re looking to solve complex testing challenges, he is the expert you need to talk to.
#VerticalAviation #DAQ #FlightTesting #EngineeringExcellence
1
3
4
192

Feb 24
Northrop Grumman and U.S. Air Force Accelerate B-21 Raider Production
defensemirror.com/news/41165…
#NorthropGrumman #USAirForce #B21Raider #EllsworthAFB #StealthBomber #SixthGenerationAircraft #StrategicDeterrence #LongRangeStrike #DefenseIndustry #MilitaryAviation #AdvancedManufacturing #FlightTesting #NuclearCapability #OpenArchitecture #AirPower #NextGenBomber #USMilitary

1
5
308

24 Dec 2025
#BREAKING : Russia’s new Baikal light aircraft has successfully completed its maiden flight.
The aircraft is powered entirely by Russian-made engines and propellers and has now entered the flight-testing phase.
#BaikalAircraft #Russia #AviationNews #MaidenFlight #FlightTesting #Russian
1
2
125

23 Dec 2025
🇬🇧⚡ Vertical Aerospace Completes Final Full-Scale Prototype Ahead of 2026 Flight Tests
Vertical Aerospace has announced the completion of its third and final full-scale prototype aircraft, which will enter piloted flight testing following commissioning in January 2026. The milestone marks a key step in the company’s electric aviation flight-test programme.
The newly completed aircraft is an exact replica of Vertical’s current full-scale prototype, which is actively undergoing transition flight testing at the company’s UK Flight Test Centre. The most recent flight was conducted on 19 December, with additional flight tests scheduled in the coming days.
As the final aircraft in the programme, the prototype will double flight-test capacity and enable public demonstrations in 2026. It incorporates advanced systems and technologies supplied by key aerospace partners, including Honeywell, Molicel, and Syensqo, reinforcing Vertical’s push toward certified electric flight.
#VerticalAerospace 🇬🇧 #ElectricAviation ⚡ #eVTOL #FlightTesting #AerospaceInnovation #AdvancedAviation

2
5
939

10 Dec 2025
48th Flight Test Course officers attended a week-long augmented FCS program by CSIR-NAL and ADA. They were exposed to digital FCS, control-law design, and advanced system architectures for future platforms.
@IAFTPS @IAF_MCC @CSIRNALOFFICIAL #FlightTesting #AerospaceInnovation

1
10
1,066
2 Nov 2025
Student Officers of the 48th Flight Test Course, Air Force Test Pilots School, visited US
Rao Satellite Centre (URSC), Bengaluru — the hub of India’s satellite design and
development under Indian Space Research Organisation (ISRO).
During the visit, the officers were exposed to the Centre’s pioneering work in space
satellites’ design, assembly, integration, and testing. The interaction provided valuable
insights into the synergy between aerospace flight testing and space technology,
broadening their understanding of India’s growing capabilities in the air and space
domains.
@IAFTPS @IAF_MCC @isro #URSC #FlightTesting #AerospaceInnovation
#IndiaInSpace

1
1
24
2,523

28 Oct 2025
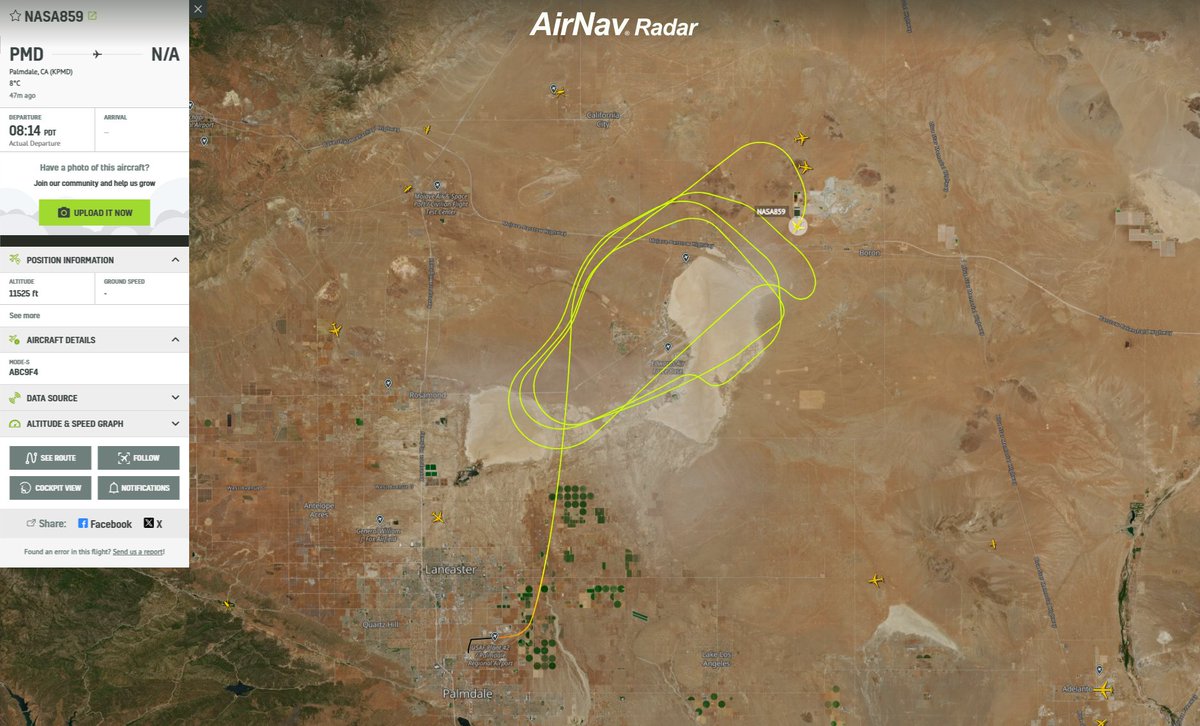
🚀 NASA’s X-59 Takes to the Skies for the First Time!
Our most tracked flight of the day goes to NASA’s X-59 QueSST (Quiet Supersonic Technology) — now airborne on its first-ever test flight from Plant 42 in Palmdale, California.
📡 Track it live: airnavradar.go.link/j3T8G
📸 Photo: NASA Headquarters / NASA/Steve Freeman (Public Domain)
#NASA #X59 #QueSST #Aviation #Supersonic #FlightTesting #AirNavRadar


1
7
37
10,216

23 Oct 2025
First jet landing coming to Western Sydney Airport ✈️
Cessna tests complete! RFS 737 “Marie Bashir” lands next week for full-scale emergency exercise.
#WesternSydneyAirport #WSI #SydneyAviation #AviationNews #AustralianAviation #FlightTesting #AirportOpening #737 #RFS
3
351

12 Oct 2025
Flight days never get old.
Every launch teaches us something new about balance, trust, and the beauty of motion.
#FlightTesting #EVTOL #Aerospace #FutureOfFlight #BlipIndustries

1
2
77

10 Oct 2025
READY TAKEOFF?.... Can These Self-Flying Planes Transform the Skies?....
WALL STREET JOURNAL: Reliable Robotics is among startups hoping to revolutionize air travel by doing away with the need for human pilots on cargo, military and even passenger aircraft
MOUNTAIN VIEW, Calif.—“Aircraft should fly themselves!” is scrawled on a whiteboard at Reliable Robotics’ offices here.
Recently two staff members watching on monitors tracked the flight path of a small airplane flying itself above northern California, about 40 miles away.
The Cessna Caravan had a pilot aboard on standby, along with a flight-test engineer, but was otherwise on its own.
They were testing a new collision-avoidance system and new radar that helps the plane see and avoid other aircraft.
If all goes as planned, Reliable Robotics eventually won’t need any pilots on board its planes.
It is among startups vying to revolutionize air travel by doing away with the need for human pilots on cargo, military and maybe even passenger aircraft.
Autonomous flight is being tested at companies from giant aircraft makers to small startups.
For now, cargo and military flights are the focus. Reliable recently signed a $17 million contract with the U.S. Air Force that involves testing autonomous cargo flights.
Flying-taxi maker Joby Aviation also recently tested its own pilotless Cessna for the Air Force over the Pacific Ocean.
Boeing and Airbus, the world’s leading makers of large commercial jets, have separately worked on introducing more automation in their aircraft, and both say the aim is to improve safety.
The two companies have also examined fully autonomous flight, but say they aren’t working on commercial-jet designs that don’t include pilots in cockpits.
Truly autonomous flight with human passengers will face a host of technical and regulatory hurdles, and—perhaps the most difficult of all—a tough sell to travelers.
Pilots, the faces and voices of safety for the flying public, reassure during startling turbulence or other in-flight scares. Their presence conveys someone is there to save the day.
“I don’t think we’re going to go full autonomy passenger operations immediately,” said Robert Rose, Reliable’s chief executive. “And the reason for that has more to do with passenger acceptance than it does the technology.”....
wsj.com/business/airlines/re…
#AutonomousFlight, #SelfFlyingPlanes, #ReliableRobotics, #AviationInnovation, #PilotlessPlanes, #AirTravelFuture, #AerospaceTechnology, #CargoFlights, #MilitaryAviation, #PassengerAircraft, #CollisionAvoidance, #RadarSystems, #CessnaCaravan, #FlightTesting, #AirForceContract, #JobyAviation, #BoeingAutomation, #AirbusAutomation, #AviationSafety, #PilotlessTechnology, #AerospaceStartups, #FutureOfFlight, #AutonomousCargo, #FlyingTaxis, #AviationRegulations, #PassengerAcceptance, #TechInAviation, #AutonomousSystems, #AerospaceEngineering, #InnovationInFlight, #PilotlessFuture, #AirTravelSafety, #AutonomousVehicles, #AviationIndustry, #SelfFlyingTech, #AirForceTesting, #CommercialJets, #AviationChallenges, #PassengerConfidence, #FlightAutomation, #AerospaceAdvancements, #PilotRole, #AviationTrends, #TechnologyInFlight, #AutonomousAviation, #FutureSkies, #AerospaceNews, #FlightInnovation, #PilotlessCargo

1
1
5
191

3 Oct 2025
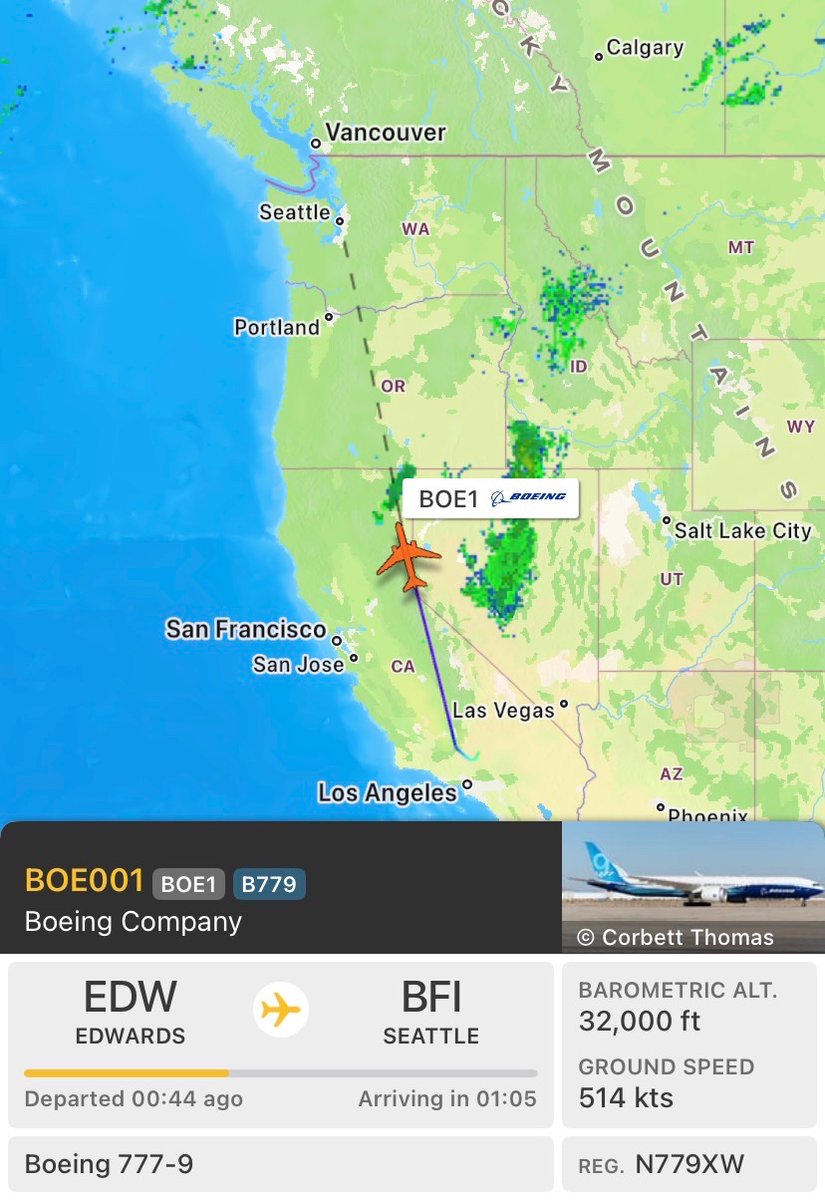
#UPDATE: WH001 wraps up 51 days of takeoff performance testing at Edwards AFB and Victorville, now heading home to Seattle Boeing Field.
#Boeing #FlightTesting
Track Flight 🔗 fr24.com/boe001
5
17
171
15,033