
Jun 12
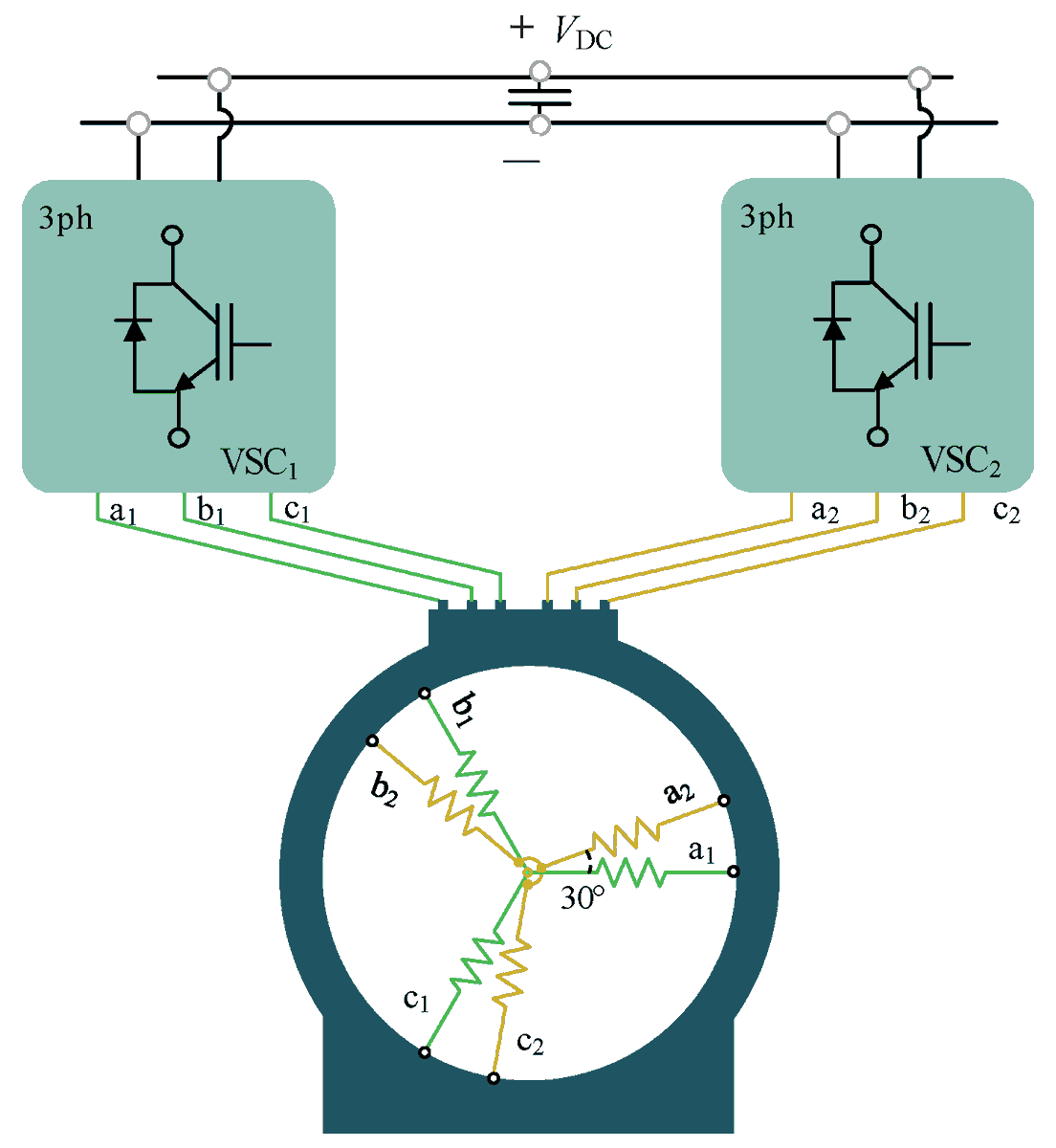
#NewArticle: "Adaptive Sampling-Time Multivector Model Predictive Control for Six-Phase Induction Motor Drives"
👨🏫 Authors: Rafael Lara-Lopez et al.
👉 Paper link: mdpi.com/2075-1702/14/6/592
#ModelPredictiveControl #MultiphaseElectricDrives
@InfoUMA
@La_UPM
@MDPIEngineering

1
3
57

Jun 11
📢 #highlycited paper
📚 Model Predictive Control for Gliding Descent on Mars
🔗 mdpi.com/2076-3417/15/19/104…
👨🔬 by Jhonathan Murcia-Piñeros et al.
🏫 National Institute for Space Research (INPE) / The Italian Aerospace Research Centre (CIRA)
#astrodynamics #modelpredictivecontrol #spaceplane

22

Process variability can turn into measurable performance gains, like 145 hours of down time eliminated and 21% increase in throughput—with the right solution in place. rok.auto/49YsvrD
#digitaltransformation #ModelPredictiveControl #Sustainability rok.auto/4e45R2c
7
8
783
#Article
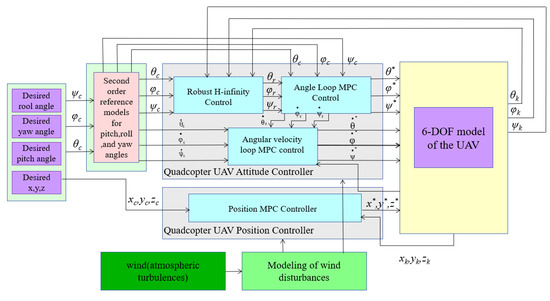
📜 Robust H-Infinity Dual Cascade MPC-Based Attitude Control Study of a Quadcopter UAV
by Nanmu Hui, et al.
🔗 mdpi.com/2076-0825/13/10/392
@MDPIEngineering
#quadrotorUAV #modelpredictivecontrol #robustHinfinitycontrol #dualcascadeMPCcontrol #attitudecontrol #openaccess
1
5
74

Apr 13
📢 #highlycited paper
📚 #LowTemperatureCombustion Modeling and Predictive Control of #MarineEngines
🔗 mdpi.com/2076-3417/14/5/2033
👨🔬 by Amin Modabberian et al.
🏫 Aalto University/University of Vaasa/Wärtsilä Marine
#modelpredictivecontrol #phenomenologicalmodeling
2
3
58
#Article
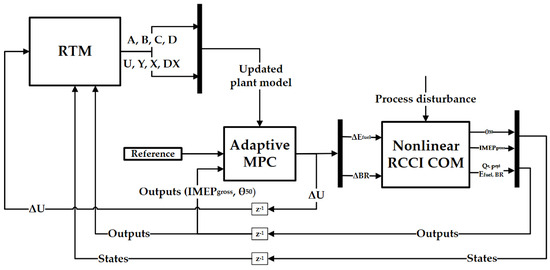
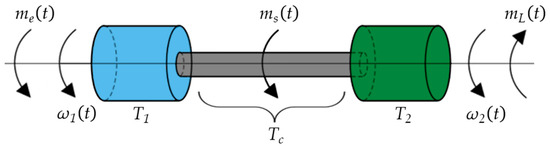
📜Comparative Study of Analytical Model Predictive Control and State Feedback Control for Active Vibration Suppression of Two-Mass Drive
Adam Gorla and Piotr Serkies
mdpi.com/2076-0825/14/5/254
#modelpredictivecontrol #MPC #statefeedbackcontrol #aMPC #feedbackcontrolsystems
2
20

Jan 19
Check out our latest work, "Actor-Critic Model Predictive Control: Differentiable Optimization meets Reinforcement Learning for Agile Flight," published in the IEEE Transactions on Robotics, where we reconcile #OptimalControl and #ReinforcementLearning, achieving the same super-human performance, but with superior generalizability, as our previous model-free deep RL! Code released!
PDF: arxiv.org/pdf/2306.09852
Code: github.com/uzh-rpg/acmpc_pub…
Full Video: youtube.com/watch?v=_qekrF4E…
Model-free #ReinforcementLearning (RL) is known for its strong task performance and flexibility in optimizing general reward formulations. On the other hand, #ModelPredictiveControl (MPC) provides robustness, constraint handling, and powerful online replanning capabilities. In this work, we extend our previous AC-MPC paper (Romero, ICRA'24) by taking a deeper look at how both approaches can be unified. We introduce and extend Actor-Critic Model Predictive Control (AC-MPC), a framework that embeds a differentiable MPC inside an Actor-Critic RL architecture. This integration allows the MPC-based actor to perform short-term predictive optimization, while the critic facilitates long-horizon learning and exploration. We conduct a comprehensive study that highlights AC-MPC’s key advantages:
- Better out-of-distribution generalization, both against unknown disturbances and changes in the quadrotor dynamics
- Improved sample efficiency
- A novel empirical analysis uncovering a relationship between the critic’s value function and the MPC cost function, providing deeper insight into their interplay. We validate our method in simulation and the real world on a quadcopter flying at superhuman speeds of up to 21 m/s, matching state-of-the-art model-free RL performance, and retaining the predictive structure of MPC for more reliable out-of-distribution behavior.
Reference:
Actor-Critic Model Predictive Control: Differentiable Optimization meets Reinforcement Learning for Agile Flight
IEEE Transactions on Robotics (T-RO), 2025
PDF: arxiv.org/pdf/2306.09852
Full Video: youtube.com/watch?v=_qekrF4E…
Code: github.com/uzh-rpg/acmpc_pub…
Kudos to @roaguiangel, @EliJalbout, @realyunlong!
@UZH_en @UZH_Science @UZHspacehub @AUTOASSESS_EU @ERC_Research @UZH_ai
3
64
419
27,000

18 Nov 2025
A new Special Issue opens for submission!
Title: Symmetry in #Robotics and #AerialSystems: Theory, Learning and Applications
Editor: Alice James, Endrowednes Kuantama and Avishkar Seth
Details: brnw.ch/21wXA6d
#callforpapers #mdpisymmetry #modelpredictivecontrol
1
2
48

9 Nov 2025
不安定な路面を安全性を確認しながら移動する四足歩行ロボット
youtu.be/uTiwrigGOVU
#quadrupedal #robot #locomotion #robust #safe #navigation #MotionPlanning #ModelPredictiveControl #DLS_Lab #iit
1
15
118
6,539

17 Jul 2025
#Article
📜 Robust H-Infinity Dual Cascade MPC-Based Attitude Control Study of a Quadcopter UAV
by Nanmu Hui, et al.
mdpi.com/2076-0825/13/10/392
#quadrotorUAV #modelpredictivecontrol #robustHinfinitycontrol
#dualcascadeMPCcontrol #attitudecontrol
2
59
29 May 2025
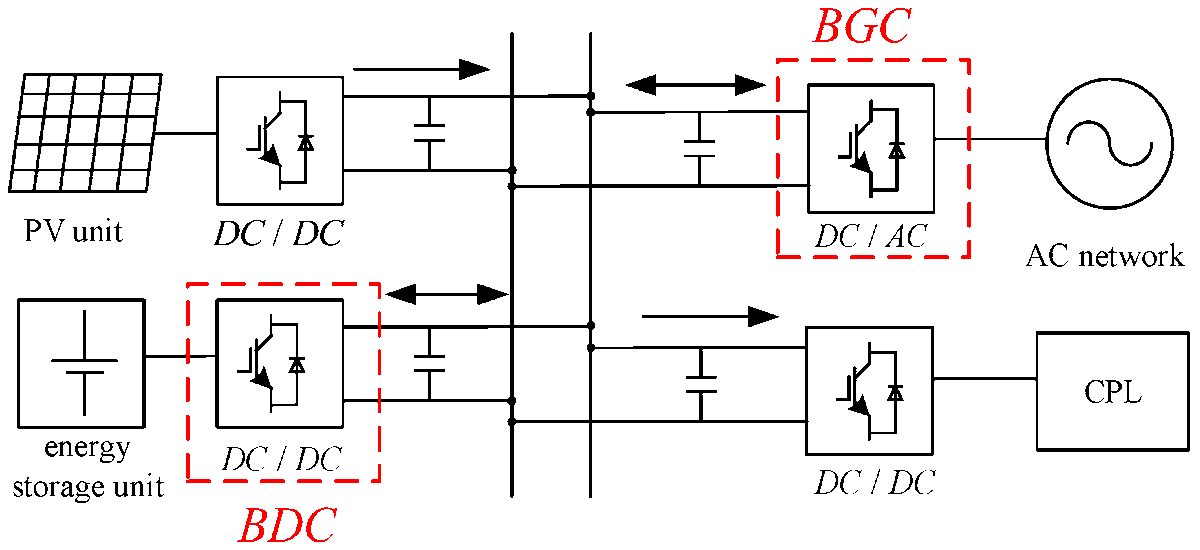
#mdpisymmetry Article "Adaptive Virtual Inertia Control Strategy for a Grid-Connected Converter of DC Microgrid Based on an Improved Model Prediction" is available at mdpi.com/2073-8994/15/11/207…
Authors: Feng Zheng et al.
#DCmicrogrid #converter #modelpredictivecontrol
3
75
8 May 2025
#Article
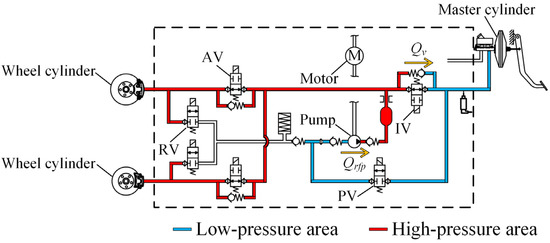
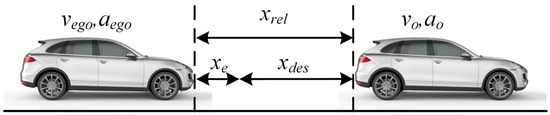
📜 A Hierarchical Control Scheme for Adaptive Cruise Control System Based on Model Predictive Control
by Hongyuan Mu, et al.
mdpi.com/2076-0825/12/6/249
@Tsinghua_Uni
@MDPIEngineering
#adaptivecruisecontrol #modelpredictivecontrol #brakebywire #decelerationcontrol
1
6
1,413
8 Nov 2024
#Article
📜 A Hierarchical Control Scheme for Adaptive Cruise Control System Based on Model Predictive Control
by Hongyuan Mu, et al.
mdpi.com/2076-0825/12/6/249
@Tsinghua_Uni
@MDPIOpenAccess
#adaptivecruisecontrol #modelpredictivecontrol #brakebywire #decelerationcontrol
1
3
914

21 Oct 2024
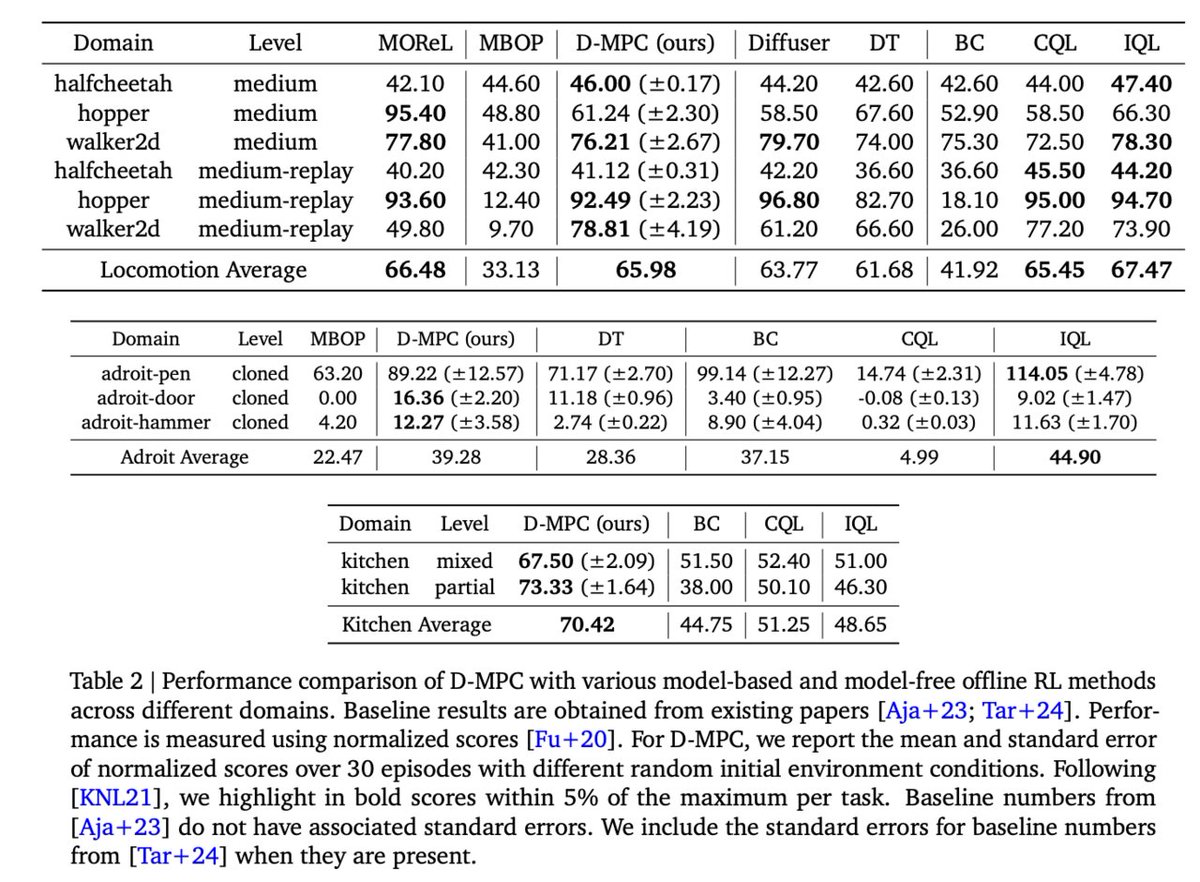
Google DeepMind Introduces Diffusion Model Predictive Control (D-MPC): Combining Multi-Step Action Proposals and Dynamics Models Using Diffusion Models for Online MPC
itinai.com/google-deepmind-i…
#ModelPredictiveControl #DiffusionModels #DMPCAI #AIAdvancements #RoboticsTechnology …
2
4
152

29 Sep 2024
👏 #Highly_Cited_Article in @Aerospace_MDPI
📜 Title: "Autonomous Landing of a Quadrotor on a Moving Platform via Model Predictive Control"
🔗 Read via: mdpi.com/2226-4310/9/1/34
#quadrotor #movingplatform #autonomouslanding #modelpredictivecontrol #disturbancerejection
2
27
23 Jul 2024
#Newpaperonline
📢 Guiding the Selection of Multi-Vector Model Predictive Control Techniques for Multiphase Drives
📌 Full text: mdpi.com/2075-1702/12/2/115
#modelpredictivecontrol #multiphase #electricdrives #multivector
@InfoUMA
1
1
50
9 Jul 2024
Check out our #RSS2024 paper "#MPCC : Model Predictive Contouring Control for Time-Optimal Flight with Safety Constraints." Model Predictive Contouring Control (MPCC) has shown promising results for agile robotics applications, including car and drone racing. Existing approaches struggle to introduce safety considerations, often resulting in crashes. What does it take to drive or fly fast and safe? We enhance our former MPCC by incorporating spatial constraints that reliably prevent obstacle collisions, allowing planning the fastest trajectory within these safety limits. To improve performance, we leverage real-world data to refine the dynamic model. Our approach is the first to achieve a 100% success rate in real-world experiments. This safety benefit comes without compromising performance, as our method achieves lap times comparable to the best-performing state-based #ReinforcementLearning (RL) policies.
Reference
M. Krinner, A. Romero, L. Bauersfeld, M. Zeilinger, A. Carron, D. Scaramuzza,
"MPCC : Model Predictive Contouring Control for Time-Optimal Flight with Safety Constraints"
Robotics, Science and Systems, 2024
PDF: arxiv.org/pdf/2403.17551
Video: youtu.be/sbKe9emghtM
Kudos to Maria Krinner, Angel Romero Aguilar, Leonard Bauersfeld, Melanie Zeilinger, Andrea Carron!
@roaguiangel @l_bauersfeld @UZH_en @UZH_Science
@UZHspacehub @AUTOASSESS_EU @ERC_Research #MPC #ModelPredictiveControl
3
45
233
17,892
8 Apr 2024
Check out our #ICRA2024 paper "Actor-Critic Model Predictive Control." Model-free #reinforcementlearning (RL) is known for its strong task performance and flexibility in optimizing general reward formulations. On the other hand, #ModelPredictiveControl (MPC) benefits from robustness and online replanning capabilities. We combine both approaches by introducing a new framework called Actor-Critic Model Predictive Control. The key idea is to embed a differentiable MPC within an Actor-Critic RL framework. The proposed approach leverages the short-term predictive optimization capabilities of MPC with the exploratory and end-to-end training properties of RL. The resulting policy effectively manages both short-term decisions through the MPC-based actor and long-term prediction via the critic network, unifying the benefits of both model-based control and end-to-end learning. We validate our method in simulation and the real world with a quadcopter across various high-level tasks. We show that the proposed architecture can achieve real-time control performance, learn complex behaviors via trial and error, and retain the predictive properties of the MPC to better handle out-of-distribution behavior.
Paper: arxiv.org/abs/2306.09852
Full Video with more details: youtu.be/mQqm_vFo7e4
Kudos to @roaguiangel, @realyunlong
@ieee_ras_icra @UZH_en @UZH_Science @UZHspacehub @aerialcore @AUTOASSESS_EU @ERC_Research
3
77
440
34,876

31 Jan 2024
Researchers exploit #DistributedReinforcementLearning and #ModelPredictiveControl for realizing #AutonomousVehicle #platoons in #UrbanRoadNetworks in a new #IEEECAA #JournalofAutomaticaSinica article.
Find more: ow.ly/3mt850QwgCS

3
52
40,702