
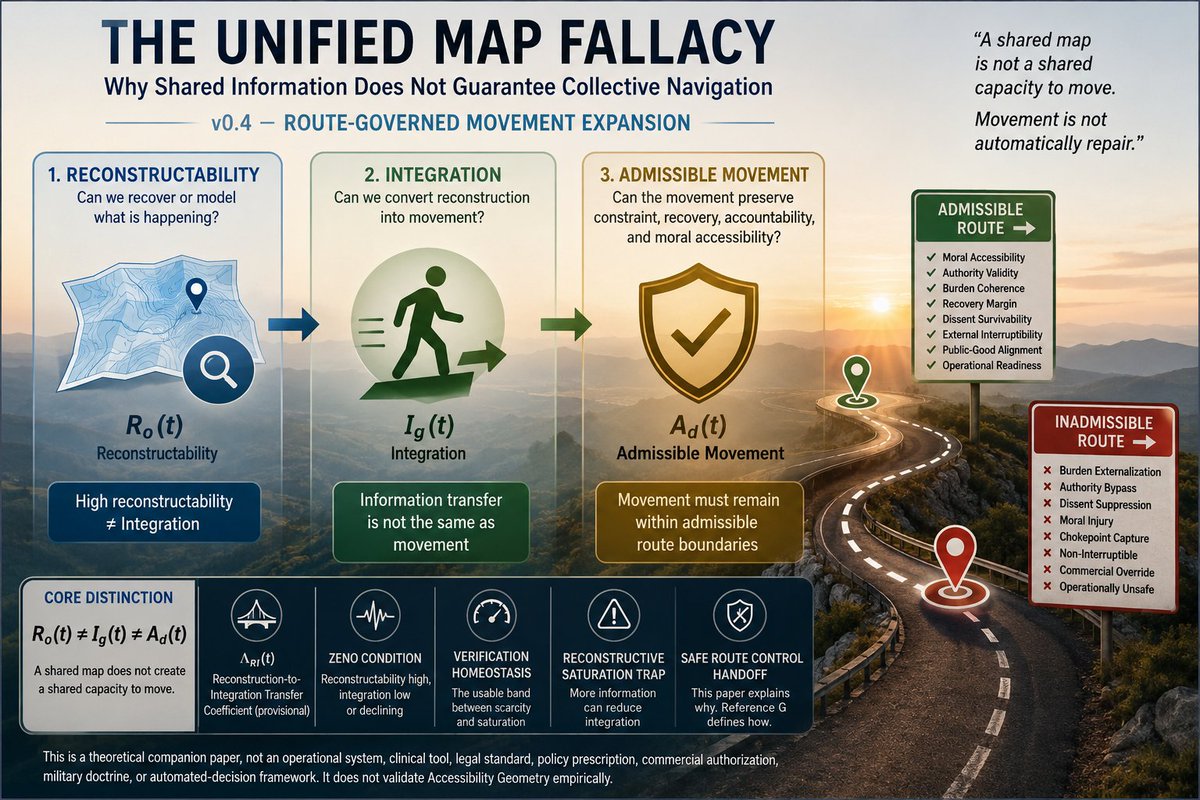
The Unified Map Fallacy: Why Shared Information Does Not Guarantee Collective Navigation v0.4 — Route-Governed Movement Expansion
DOI: doi.org/10.5281/zenodo.20709…
This paper examines a mistake I think appears across institutions, platforms, AI systems, governance models, dashboards, prediction markets, and warning systems:
The assumption that if everyone shares a sufficiently accurate map, coherent action will naturally follow.
Within Accessibility Geometry, that assumption fails because:
Reconstructability is not Integration.
A system may see the problem, measure the problem, report the problem, dashboard the problem, forecast the problem, debate the problem, and still fail to change course.
The central distinction remains:
R_o(t) ≠ I_g(t)
A shared map is not a shared capacity to move.
Version v0.4 extends the argument further.
It is not enough for a map to become movement.
The movement must remain admissible.
A system may reconstruct accurately, coordinate effectively, act quickly, and still move through a route that externalizes burden, suppresses dissent, bypasses authority, degrades public-good access, collapses moral accessibility, or exceeds operational readiness.
So the paper extends the model from:
map → movement
to:
map → movement → admissible movement
This version develops:
Λ_RI(t), the provisional Reconstruction-to-Integration Transfer Coefficient
the Zeno Condition
Verification Homeostasis
the Reconstructive Saturation Trap
Human-Compatible Map-to-Movement Discipline
Moral Route Constraint
Burden-Transfer Audit
Coordination Capture
Future-Coordinate Backcasting
Delegated Action Envelope
Authority Assumption Event
Sovereign Dissent and Consequence Posture
Public-Good Accessibility
Chokepoint Dependency
Commercial / Non-Operational Boundary
Layer III Containment
Warning-to-Action and Safe Route Control Handoff
The core clarification is:
The map must not merely become movement. The movement must remain admissible.
This is a theoretical companion paper, not an operational system, clinical tool, legal standard, policy prescription, commercial authorization, military doctrine, theological claim, or automated decision framework.
It does not validate Accessibility Geometry empirically.
It does not operationalize Safe Route Control.
It explains why Safe Route Control is necessary.
The simplest summary is:
Shared reconstructability should not be mistaken for shared integration, and integrated movement should not be mistaken for admissible movement.
A shared map does not create a shared capacity to move.
Movement is not automatically repair.
#AccessibilityGeometry #UnifiedMapFallacy #Reconstructability #Integration #AdmissibleMovement #VerificationHomeostasis #ZenoCondition #SystemsTheory #Cybernetics #AIGovernance #PredictionMarkets #OpenData #InstitutionalDesign #SafeRouteControl #HumanTAWS #RouteGovernance #CoherenceDynamicsLaboratory
14