

"the shadowhand must step into his own light"
LEAVE HIM ALOOOOONEEEEEEEE
23

ryu retweeted

7 Sep 2023
Poor Sinestrea is taking the trial of Shadowhand🌚
#ハニーセレクト2 #HoneySelect2 #AOV #ROV #ArenaofValor #傳說對決
15
831
3,592
288,306
𝒆𝒗𝒆𝒓𝒍𝒊𝒈𝒉𝒕'𝒔 𝚕͟𝚘͟𝚜͟𝚝 retweeted

6 Feb 2021
⠀ ⠀ ⠀ ⠀ 𖤐 ⠀⠀˖ ⠀ 𝐬𝐡𝐚𝐝𝐨𝐰𝐡𝐚𝐧𝐝 .
⠀ ⠀ ⠀ ⠀ ،̲، maybe you should try
𝐅𝐑𝐈𝐄𝐍𝐃𝐒 𝑠͟𝑜͟𝑚͟𝑒͟𝑡͟𝑖͟𝑚͟𝑒.
25
25

No dibujo particularmente bien y mi camara es una verga pero aca esta el primer boceto de ShadowHand (estoy abierto a sugerencias de nombres)
TODO en este diseño y lore podria cambiar, personalmente la cabeza me gusta pero aun no se que cuerpo darle ⬇️

Bien chavales, voy a empezar con el alien original (pq no me pueden juzgar tanto)
Voy a hacer un alien elemental, ya que cada serie empieza con uno




1
2
12
432

May 28
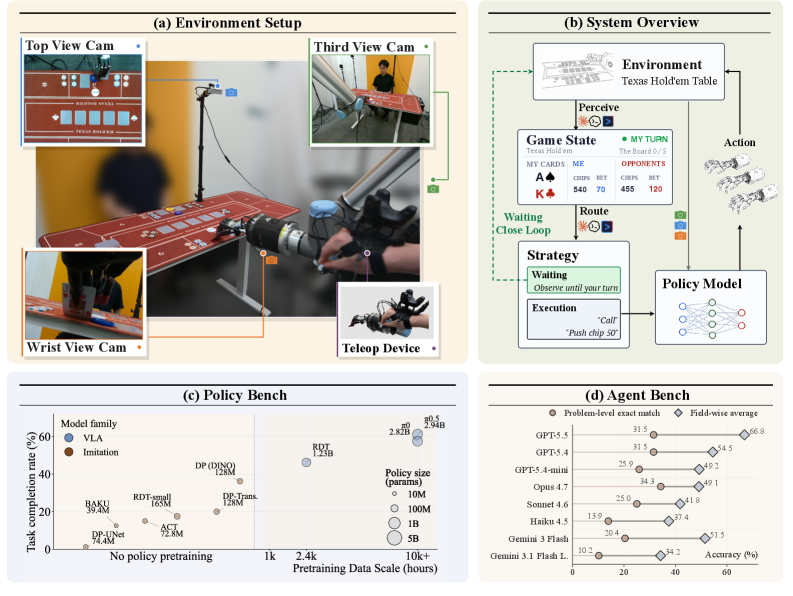
ロボットにテキサスホールデムポーカーをやらせるベンチマーク「DexHoldem」が登場した(https://arxiv[.]org/html/2605.18727v1)。
ポーカーの強さを競うわけではない。カードやチップを使った卓上操作は「薄いカードをつまむ精密さ」と「チップ残高を目で追う知覚力」を同時に要求する。この2軸を実機で同時に評価するベンチマークはほとんど存在しなかった。
実機はShadowHand(24自由度の多指ロボットハンド)をURアームに搭載したもの。1,470件の人間による遠隔操作デモから、カードのつかみ・置き・チップの押し引きなど14種類の基本動作を学習させる。評価では「タスク完了」だけでなく「周囲を乱さずに完了したか」も測る。隣のチップを弾いてしまえばその時点でアウト。
最高性能モデル(約30億パラメータ)でも「場を保全した成功」は80試行中38回=47.5%。ここに大きな動作差がある。カードのつかみ取りは100%成功するのに、チップの引き操作になると15〜30%まで落ちる。同じモデルでも動作の種類で難易度が全く違う。
AI知覚の評価では、卓上の全フィールド(ターン・チップ残高・賭けチップ数など)を完全に正しく読み取れた問題の割合がClaude Opus 4.7で34.3%(厳密一致での最高)、GPT 5.5で31.5%。各フィールド単体の平均精度はGPT 5.5が66.8%でトップだが、全部まとめて正解するのは別の難しさがある。「誰のターンか」は90%超で当てられるのに、相手のチップ枚数は最高でも43.8%まで落ちる。
実際の閉ループ実験では54ステップのうち26回が「待機」だった。動かすより、正しく見るほうが難しい。
11
558

May 26
I’m Essek Thelyss, Shadowhand to the Bright Queen of Kryn Dynasty
#EssekThelyss #CriticalRole #TheMightyNrin

1
3
98

May 22
I love being a Night Terror in Nightmare Network, so I'm super excited to now be part of leadership! I will now be the Shadowhand of the team. 😈🖤 hehe

We are so happy to welcome the incredibly talented @twilaverge to our leadership team here at Nightmare Network!
Our goal is to help horror creators connect with each other, with brands, and with developers, and use their skills to help one another thrive & realize their goals.
1
7
178


He is so gorgeously smug here 😏 I bet it's not the first time he went there and mayhaaaaps not alone (I know, the armpiece would suggest that he is still the Shadowhand, but maybe he kept it as a souvenir lol)
1
2
139

May 20
Been going deep on the tech stack behind @axisrobotics lately, and this one's worth breaking down.
DexGraspNet 2.0 — the dataset Axis is fine-tuning for dexterous grasping. Hot out of CoRL 2024, built by PKU Galbot, and it's a serious piece of infrastructure.
What is it exactly?
Massive dataset: 1,319 objects, 8,270 cluttered scenes, and 427 million grasp labels — all generated for the LEAP Hand using force-closure optimization to ensure every grasp is actually stable.
The original DexGraspNet 1.0 had 1.32M grasps on ShadowHand. 2.0 blows that out of the water and targets cluttered environments — the messy, unpredictable stuff that actually matters in the real world.
The method is clever:
Two-stage diffusion model conditioned on local point cloud geometry. Not random generation — it learns structure from data to propose high-quality grasps fast.
The real flex? Zero-shot sim-to-real transfer with test-time depth restoration hits 90.7% success rate on a physical LEAP Hand UR5 arm in cluttered scenes. That number is genuinely impressive.
What's Axis actually doing with it?
They take 1 seed mesh (say, a loaf of bread), generate hundreds of physically plausible deformed variants, then fine-tune DexGraspNet 2.0 on ~500 of those assets.
Result: 10–20% grasp success rate improvement on both single and multi-object tasks. This is the asset-level augmentation Axis is integrating into their TaskGen pipeline — and data contributors farming on the hub are directly helping scale this.
Bottom line:
DexGraspNet 2.0 isn't just a dataset. It's core infrastructure for sim → real-world transfer. Axis layering on-chain data provenance on top means the community is co-building the data engine for Physical AI.
If you're contributing to Axis — high-quality asset scans and failure recovery logs matter more than you might think. They feed directly into fine-tuning loops like this.
Code data are public on GitHub/HF if you want to get your hands dirty.
Does DexGraspNet 2.0 Axis accelerate the humanoid robotics timeline? I think yes. Drop your thoughts.

1
5
115

May 18
Ahhh Shadowhand 🌌🖤


2
51

May 18
Building dexterous manipulation, one thing kept frustrating me: no good eval benchmark in sim.
Most papers report numbers on a floating hand — pose the fingers, close, check if the object stays. That tells you the model can wrap an object. It doesn't tell you whether the grasp survives a real arm reaching in, gravity turning on, or the object resting on a surface instead of welded to an anchor.
So at PathOn Robotics, we built one. A MuJoCo benchmark that sweeps:
🔹 hands — Allegro Barrett today; ShadowHand, DH-3, Inspire next; plus our own in-house design (prototyping)
🔹 objects — YCB, ContactDB
🔹 physics — floating → arm-in-the-loop → object on a pedestal under real gravity
Swap any axis with a single config entry.
The video: Allegro YCB orange and Barrett ContactDB apple, same Agilex Piper arm, same stack.
More coming soon 👇
#Robotics #DexterousManipulation #Grasping #MuJoCo #PathOnRobotics
1
11
48
4,608

May 8
Didn’t realize Forbidden Solitaire was by the Regency Solitaire/Shadowhand team. Loved both those games so really excited to see what they do with a wholly different aesthetic
1
1
152

My doll literally has nothing there, lol, I made this drawing to participate in that shadow hand trend, lol.
#shadowmeme #shadowhand #draw #desenho #character
5
96

May 5
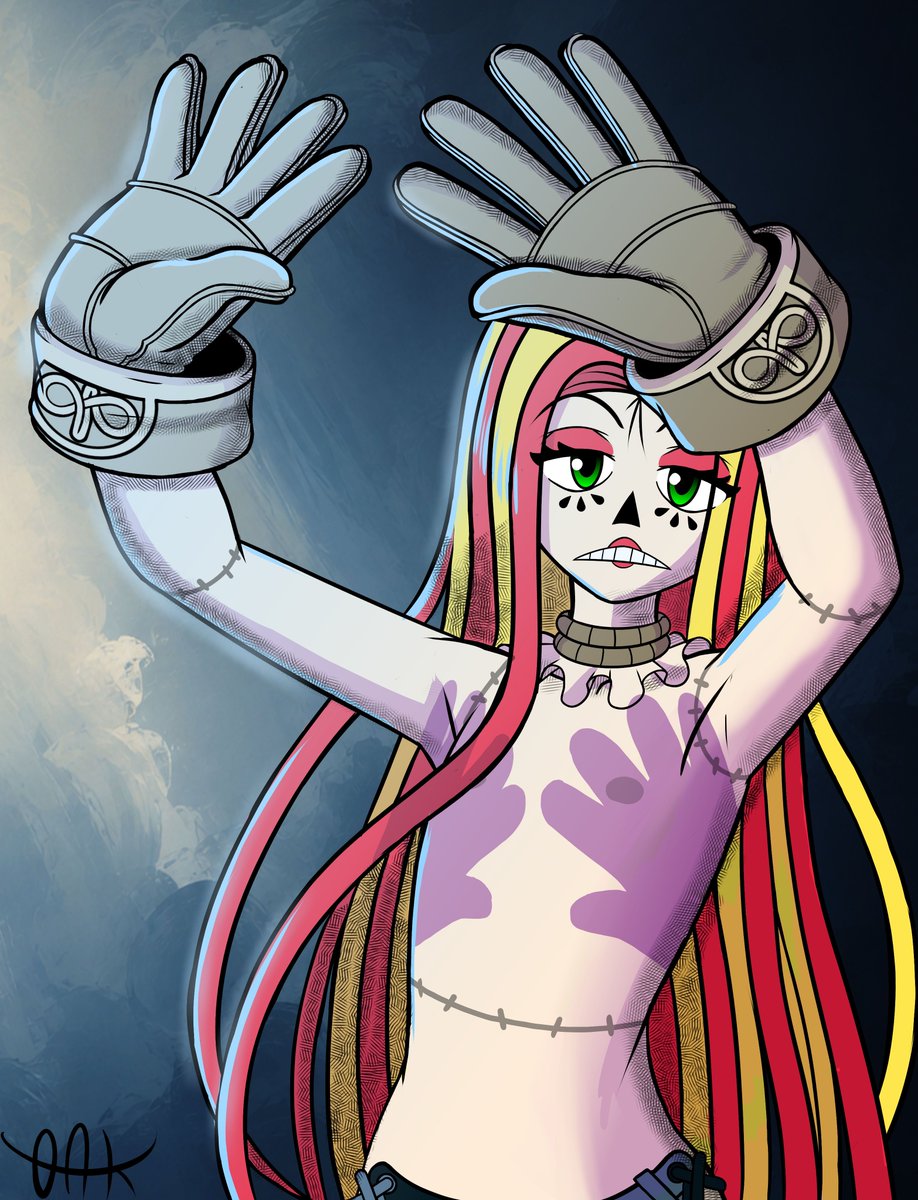
Hey y'all! It's been awhile 😅 been busy but got some time now and wanted to post something, so I did the shadow hand boob meme! Zoey sure looks like she's having fun lol
#oc #art #artmoot #artmoots #shadowboob #shadowhand #ocart #characterart #originalcharacter

3
6
34
924

May 3
Two trends, Petunia?
- That's the only w-way to have time to do these trends haha!
#Shadowhand #goldenweek2026

2
5
84
1,138

So how have you been these past couple of months?
The shadowhand finds out.
#criticalrole #mightynein

7
208
1,370
10,189

Looking forward to reviewing Forbidden Solitaire, streamed some more Shadowhand yesterday for my #Twitch followers

1 day :-o
1
4
123