
「AIで空室に家具を配置し、暮らしを想像できる」
そんなツールの開発には、
5万枚規模の画像データや3000万円規模の開発費が必要になるらしい。(5万枚ものの画像データを集めて学習させたのはすごいな!!)
でも僕のツールは大量の学習データを必要とするものではない。「世界の構造」を構築し、
その世界の中で家具やレイアウトを操作するアプローチ。
だからこそ、
・ベッドを変更する
・家具を配置する
・壁紙を変える
・空間構成を変える
といったことを、
学習データの再現ではなく、
世界の構造から扱える。
僕が目指しているのは、
AIによる最適化ではなく、
世界そのものを構造化し可視化する
「世界エンジン」です。
#AI #建築 #生成AI #WorldEngine
youtu.be/NBJ5vz9kUPw?si=UsaQ…

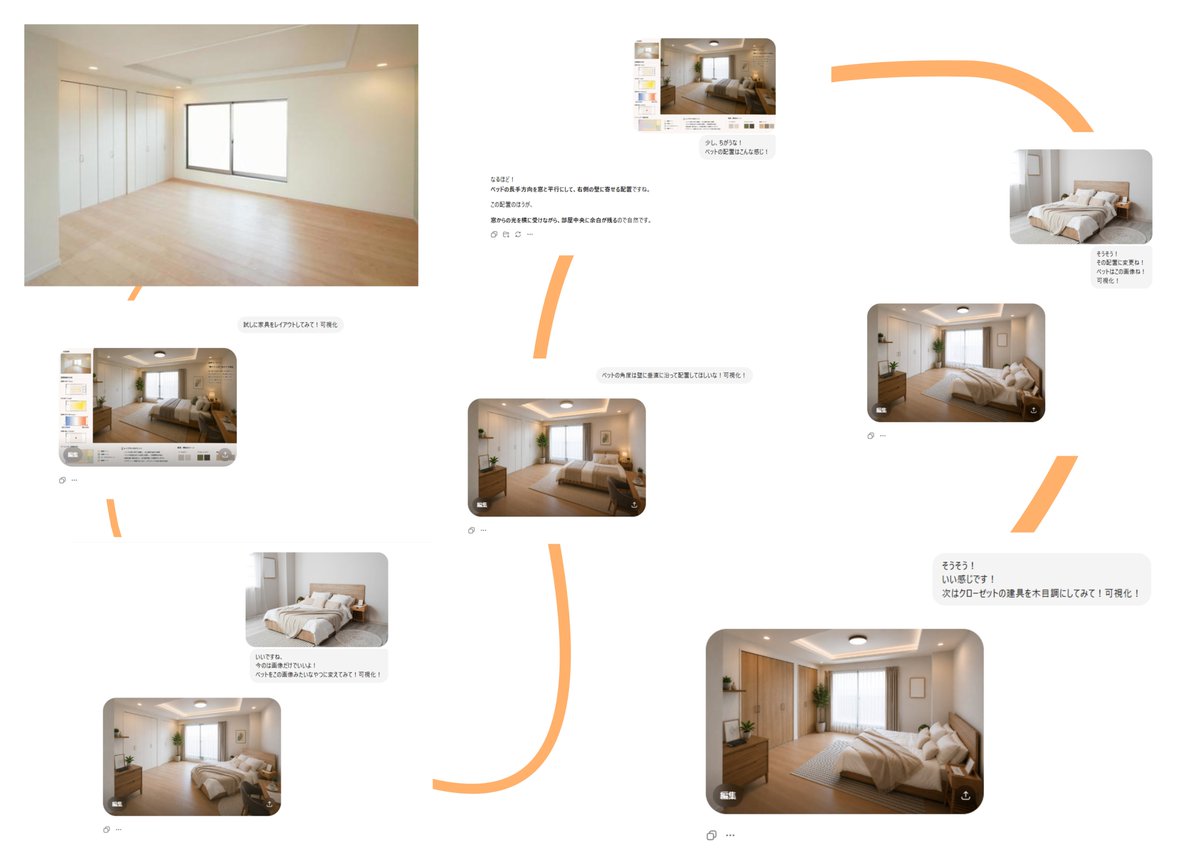
先日紹介した、
AIで空室に家具を配置する技術。
今回は実際に、
空室の画像から段階的に空間を変化させてみた。
・家具レイアウト
・テーブルサイズ変更
・ソファの色変更
・観葉植物変更
・建具の木目化
・寝室レイアウト変更
今のAIは、
学習された事例から最適化しながら、
空間を再構成している。
それだけでも十分すごい。
でも僕が興味があるのは、
その一歩先。
家具や素材を学習するのではなく、
「なぜその配置になるのか」
「なぜその空間が心地よく感じるのか」
という空間構造そのものを理解すること。
建築の世界を持たせることで、
光・流れ・重心・圧力・静寂といった、
空間の見えない構造まで可視化できるようになる。
また、このような技術が進化し、
AIと会話しながら家具レイアウトや壁紙を変更できるようになれば、
ただ内覧に行くだけではなく、
「どんな家具が合うのか」
「どんなコンセプトがこの部屋に合うのか」
をその場でスタディができるようになる。
そうなれば、
AIとの関係性や向き合い方も変わっていくと思う。
AIに判断を任せるのではなく、
AIと一緒に世界を理解していく。
そんな形で、
将来的にAIとより良い共存ができればいいなと思っています。
生成AIから、
世界を理解するAIへ。
#AI
#建築
#生成AI
#空間デザイン

134

May 9
What this incredible journey taught me—robotics is so hard, and data has never been more important. Go WorldEngine!

Huge congrats to @gs_ai_ on GENE-26.5.
Human level dexterity is finally here. Working alongside the Genesis team has been one of the most rewarding journeys---late nights, hard problems, and a shared belief that robotics is far from solved.
Proud that WorldEngine contributed to the "fuel for the engine." Dexterity got pushed to the limit across hardware, data, models, and system integration---and we're down to solve it one data point at a time.
✉️ contact@worldengine.ai
3
24
4,288

Huge congrats to @gs_ai_ on GENE-26.5.
Human level dexterity is finally here. Working alongside the Genesis team has been one of the most rewarding journeys---late nights, hard problems, and a shared belief that robotics is far from solved.
Proud that WorldEngine contributed to the "fuel for the engine." Dexterity got pushed to the limit across hardware, data, models, and system integration---and we're down to solve it one data point at a time.
✉️ contact@worldengine.ai
May 6

We are back. After one year of quiet building.
Introducing GENE-26.5, our first robotic brain that takes a major step toward human-level capability.
For years, robotics has struggled to learn from the world’s largest and valuable data source: Humans.
Solving it means rethinking the whole stack from the ground up:
- A robotics-native foundation model.
- A 1:1 human-like robotic hand.
- A noninvasive data collection glove for motion, force, and touch.
- A simulator that turns weeks of experiments into minutes.
GENE-26.5 is trained across language, vision, proprioception, tactile, and action. We designed a set of tasks to test how far we can go with this new paradigm.
Fully autonomous, 1x speed, one model, same weights. (Enjoy with sound on)
We are approaching the endgame for robotics.
And this is just a beginning.
3
13
6,457

Apr 24
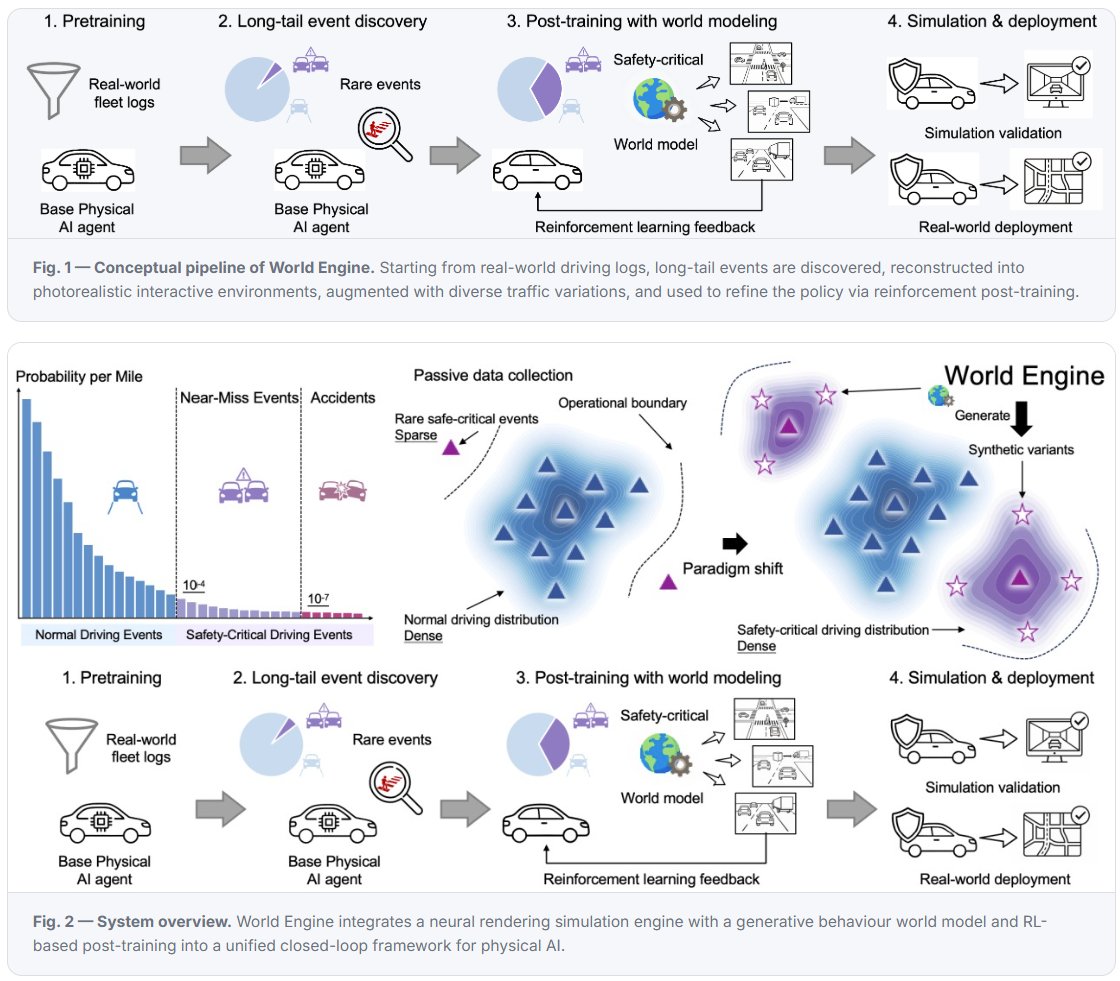
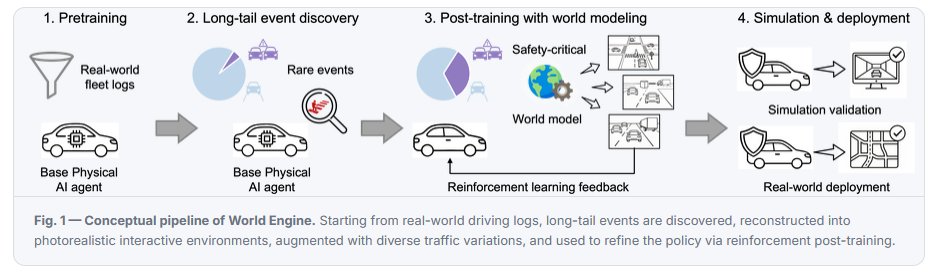
What if you could train a self-driving car on its hardest moments, not just its longest drives?
OpenDriveLab, Huawei, NVIDIA & others present World Engine.
Instead of just adding more miles of normal data, it generates massive volumes of synthetic edge cases—like cut-ins and near-misses—that are rare but critical in real life.
It outperforms standard methods, slashing collision rates by 45.5% in sim and enabling 200 km of real-world driving with zero disengagements.
WorldEngine: Towards the Era of Post-Training for Physical AI
Code: github.com/OpenDriveLab/Worl…
Project: opendrivelab.com/WorldEngine…
Our report: mp.weixin.qq.com/s/5YWYvtMxy…
📬 #PapersAccepted by Jiqizhixin
1
3
549

Apr 20
Check out the blog post giving a quick overview of our 🌍WorldEngine approach for scalable and data-smart post-training for autonomous driving.
The dataset and much of the code are now up. Full technical report will be up soon.
Apr 20

【1/5】🌍 WorldEngine: Towards the Era of Post-Training for Physical AI
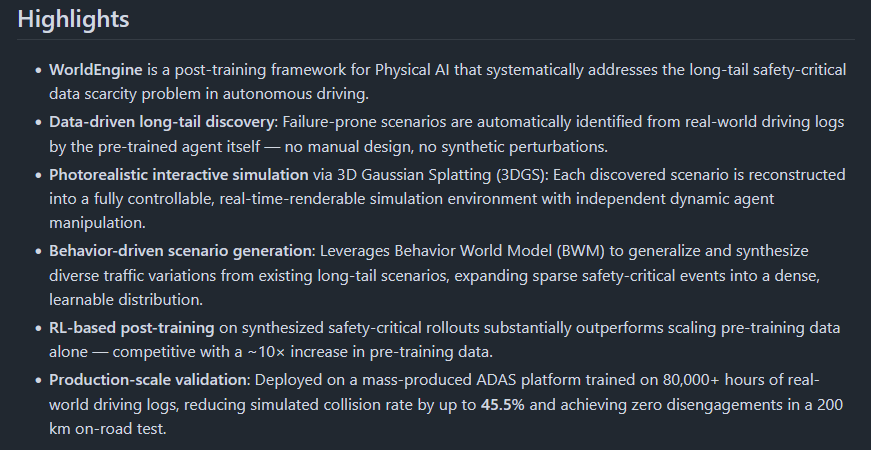
🎯 A post-training framework for Physical AI that systematically addresses the long-tail safety-critical data scarcity problem in autonomous driving.
🧱The missing infrastructure for Physical AI post-training in AD. Open-source. Production-validated.
github.com/OpenDriveLab/Worl…
#WorldEngine #PhysicalAI #OpenDriveLab
4
20
2,322

Apr 20
【5/5】That's all!
Hope #WorldEngine brings you fresh insights into post-training infrastructure for Physical AI.
If you find it useful, please give it a star 🌟!
Github: github.com/OpenDriveLab/Worl…
Huggingface: huggingface.co/datasets/Open…
Project Page: opendrivelab.com/WorldEngine…
Teamwork from @OpenDriveLab
Shoutout to @sephy_li @ilnehc @francislee2020 @CaojunWang @GeorgeL94133026 📢
1
2
184
Apr 20
【1/5】🌍 WorldEngine: Towards the Era of Post-Training for Physical AI
🎯 A post-training framework for Physical AI that systematically addresses the long-tail safety-critical data scarcity problem in autonomous driving.
🧱The missing infrastructure for Physical AI post-training in AD. Open-source. Production-validated.
github.com/OpenDriveLab/Worl…
#WorldEngine #PhysicalAI #OpenDriveLab
1
5
17
3,263
Apr 18
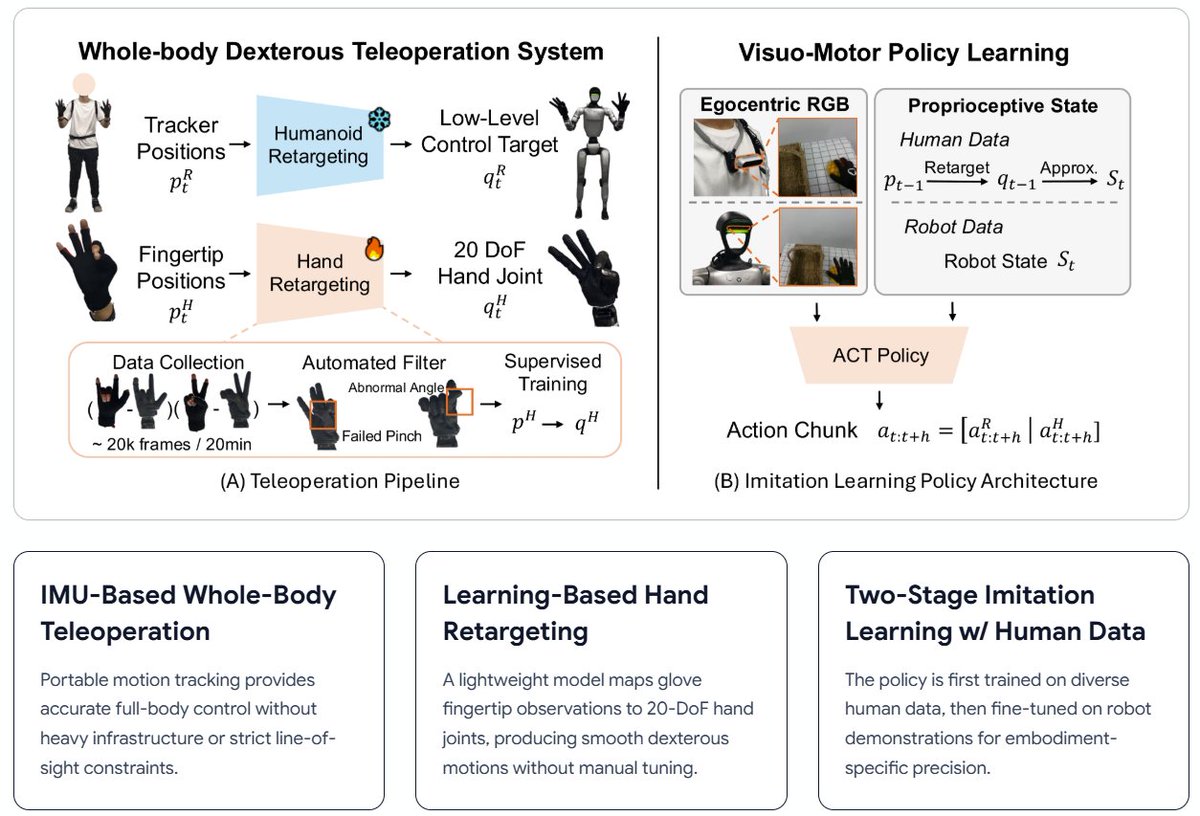
What if training dexterous humanoids for complex, real-world tasks just got dramatically easier?
USC Physical Superintelligence Lab and WorldEngine AI present HumDex!
They built a portable teleoperation system that effortlessly captures human full-body and precise hand movements. This human data then pre-trains robot policies for general skills, which are fine-tuned with minimal robot-specific data.
HumDex significantly boosts robot generalization for challenging tasks like bimanual and whole-body manipulation, across diverse objects, positions, and backgrounds, all while slashing data acquisition costs.
HumDex: Humanoid Dexterous Manipulation Made Easy
Paper: aper:
Project: psi-lab.ai/humdex
Code: github.com/physical-superint…
Our report: mp.weixin.qq.com/s/BmOlW8Ikt…
📬 #PapersAccepted by Jiqizhixin
3
16
62
5,117
Apr 11
#WorldEngine is one of the most exciting projects in AD in the past years!
It's a post-training framework tackling the scarcity of long-tail safety-critical scenarios by: mining -> 3DGS reconstruction and dynamic agents control w/ behavior world models -> RL post-training.

Apr 11

Introducing #WorldEngine, github.com/OpenDriveLab/Worl…, a two-year long project. The missing infrastructure for Physical AI post-training in Autonomous driving. Open-source. Production-validated.
7
40
6,475


Apr 11
Physical AI post-training (especially for AD) has been constrained by the high cost of real-world interaction.
Now, WorldEngine offers a promising solution
Let's go for WorldEngine! Incredible work from @OpenDriveLab!
Apr 11
Introducing #WorldEngine, github.com/OpenDriveLab/Worl…, a two-year long project. The missing infrastructure for Physical AI post-training in Autonomous driving. Open-source. Production-validated.
2
13
1,358
Apr 11
Go for #WorldEngine!!!
Apr 11
Introducing #WorldEngine, github.com/OpenDriveLab/Worl…, a two-year long project. The missing infrastructure for Physical AI post-training in Autonomous driving. Open-source. Production-validated.
5
379

Apr 11
Introducing #WorldEngine, github.com/OpenDriveLab/Worl…, a two-year long project. The missing infrastructure for Physical AI post-training in Autonomous driving. Open-source. Production-validated.
4
38
187
26,228
Apr 8
What if we could teach humanoid robots intricate skills more efficiently than ever before?
The USC Physical Superintelligence (PSI) Lab, NVIDIA, and WorldEngine introduce Ψ0 (Psi-Zero).
Their new open foundation model rethinks how humanoids learn complex tasks by decoupling the learning process: it first acquires general visual-action understanding from human videos, then masters precise robot control using high-quality humanoid data.
Ψ0 sets a new standard for universal humanoid loco-manipulation, achieving over 40% higher success rates across multiple complex tasks while using more than 10 times less training data than prior state-of-the-art approaches.
Ψ0: An Open Foundation Model Towards Universal Humanoid Loco-Manipulation
Paper: arxiv.org/abs/2603.12263
Project: psi-lab.ai/Psi0/
Code: github.com/physical-superint…
Our report: mp.weixin.qq.com/s/yvkG5ZcO1…
📬 #PapersAccepted by Jiqizhixin

12
68
4,476

Mar 31
The University of Southern California Physical Superintelligence (PSI) Lab chose MANUS gloves as the hand-tracking layer for Ψ₀, their new open foundation model for humanoid loco-manipulation, developed in collaboration with @NVIDIARobotics and WorldEngine.
MANUS gloves deliver reliable, full-DoF finger tracking where vision-based VR tracking falls short, keeping data clean, consistent, and free from the occlusion issues that compromise model performance.
As the authors state in the paper: "Fine-grained finger motions are acquired using MANUS gloves, allowing direct control over all degrees of freedom of the dexterous hands."
Paper: arxiv.org/abs/2603.12263
Video source: psi-lab.ai/Psi0/
@yuewang314 #robotics #humanoids #research #USC #DataCollection #EmbodiedAI #PhysicalAI
3
8
542

2
2
856
Mar 26
Brought to you by our own Liang Heng, @Yihe_yihe , Jiajun Xu, Henghui Bao, and w/ Di Huang. Yet another fun collaboration between WorldEngine and USC : )
1
1
2
604
Mar 17
Great models need great data. We aim to capture enormous egocentric videos to scale up humanoid pre-training through customized hardware (from WorldEngine) and collaborations with more partners.
In addition, we built a custom single-operator teleoperation system for whole-body humanoid control:
🥽 PICO headset wrist trackers → upper body pose via inverse kinematics
🧤 MANUS data gloves → full dexterous hand control (all finger DOFs)
🦿 Waist & foot trackers → locomotion commands fed to an RL walking policy
One person controls the entire robot — walking, reaching, grasping, and fine manipulation. This avoids the multi-operator setups and produces much higher quality demonstrations.
5/10
1
2
3
605

Jan 21
Huge thanks for our partners @frodobots @LumosRobotics @AgilexRobotics @ARXrobotics @GalaxeaDynamics @cyberorigin_ai @GenrobotAI @XYZRoboticsInc @DexmateAI DataWiz WorldEngine FeeTech
1
2
286

Thor #494 cover dated January 1996.
On Worldengine, Thor and Amora meet Price, a former Physics professor with a truly deviant past.
ALT cover dated
9
75
1,103