
Joined September 2016
- Tweets 1,110
- Following 436
- Followers 325
- Likes 4,264
30 Photos and videos





Pinned Tweet

28 Sep 2021
Go @OlympusMonsTeam!
Go @PALRobotics!💪🏽💪🏽
2 years of hardwork turned to a dream come true!!
Very proud to be part of the team!
27 Sep 2021

Congratulations to the winners of the @NASAPrize Space Robotics Challenge Phase 2, presented by BHP! These teams have been working since 2019 to help develop code for NASA’s next generation of space robots. Visit the link to learn more! bit.ly/2H4xbyO

1
5
Sai Kishor Kothakota retweeted

Mowing some lawns for the next RoboPlan release...
(among many other things, including performance improvements)
1
6
15
657
Sai Kishor Kothakota retweeted

Jun 10
same robot but they gave me a gpu 🏃
1 Oct 2025

Overheard from the Korean lady behind me: "That's it?"
Feel like telling her: every little step counts
1
11
2,412




The agility determination to have their digits on the shop floor is paving the way for a more flexible and responsive supply chain🤖🦾
May 13

Digit’s been clocked in since 2023, streaming continuous operations.
2
62
Sai Kishor Kothakota retweeted

May 14
I think more people should be teaching their robots how to fall. incredibly important

13
13
200
20,226
Sai Kishor Kothakota retweeted

cuRobo is now open source under Apache 2.0.
cuRoboV2 adds <1 ms GPU-native TSDF/ESDF semantic mapping, whole-body IK/MPC and trajectory optimization for humanoids, ~50 ms torque-limited planning.
Report: arxiv.org/abs/2603.05493
Code: nvlabs.github.io/curobo
5
33
221
23,027
Sai Kishor Kothakota retweeted

Apr 30
SMP is such a brilliant solution to AMP's issues.🏆
AMP: Binary signal (real/fake). Fantastic for one to few styles, but you're always fighting the discriminator learning too fast resulting in zero gradient. It's also super intolerant of style imbalance in dataset.
SMP: Continuous signal (fancy diffusion noise trick to measure distance against learned plausible motions). Every single episode always provides valuable reward signal.
No signal collapse.
No co-evolution balance pain.
More forgiving of imbalanced motion types in dataset.
Wild.
yxmu.foo/smp-page/
3
27
1,027
Sai Kishor Kothakota retweeted

Apr 27
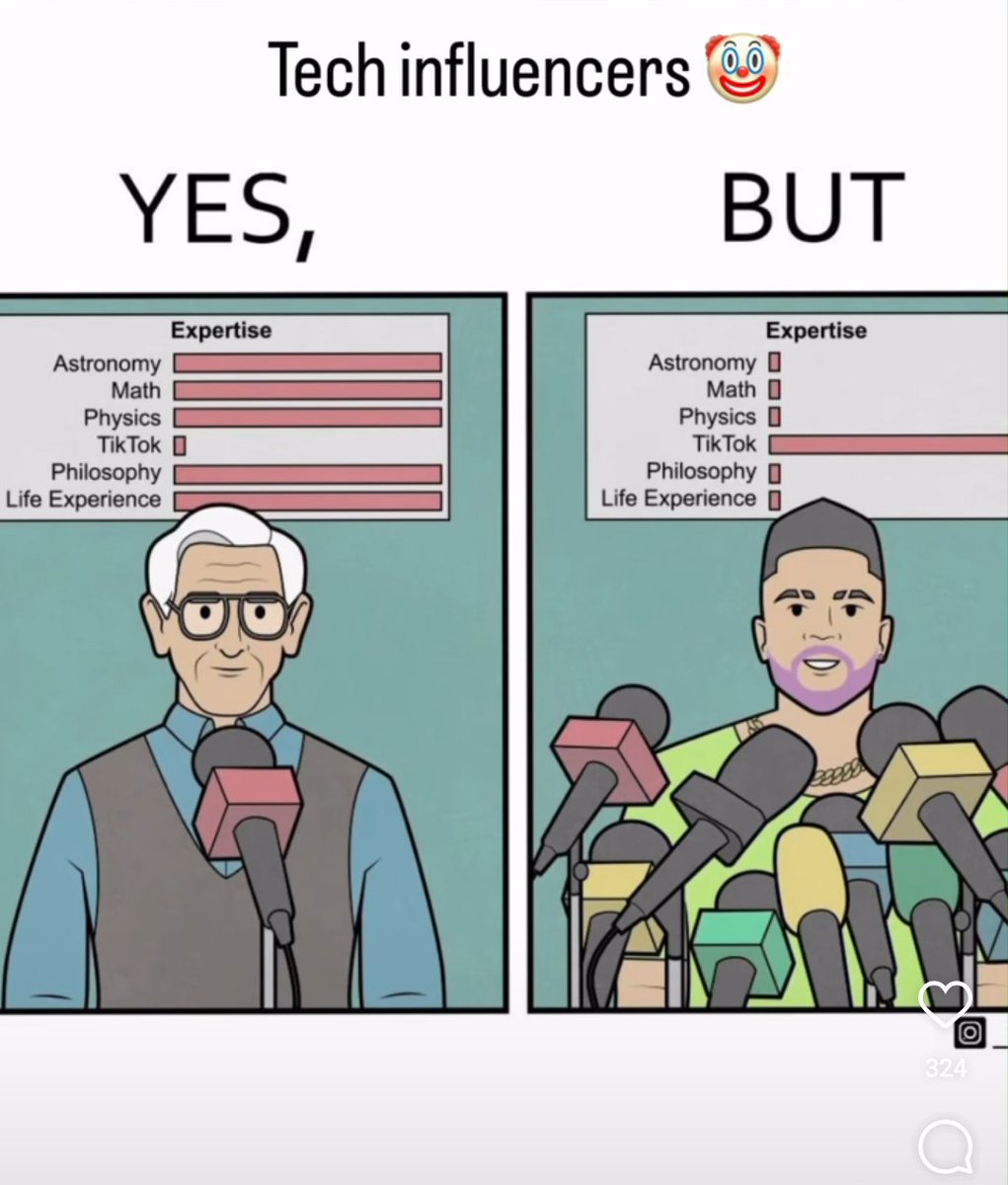
Two Anthropic engineers, who built Claude just explained why you use less than 10% of actual Claude abilities.
This 24-minute talk will change how you use Claude Code forever.
Watch it, then read the breakdown below👇

29
401
2,738
574,262
Sai Kishor Kothakota retweeted

Apr 28
This is how you navigate the Asimov v1 repo.
Apr 27

We're open-sourcing Asimov v1, a humanoid robot.
With Asimov v1, you can build, train on, and make it your own humanoid robot. It's the first step of building a humanoid labor force for the rest of us.
Asimov v1 is 1.2 m tall, 35 kg, with 25 actuated degrees of freedom. Structural parts machined in 7075 aluminium and 3D-printed in MJF PA12 nylon.
We're releasing the mechanical design and simulation files. Ready for locomotion policy training out of the box.
The BOM is open too. Source everything yourself, or order the DIY Kit. All components, ready to assemble. $499 deposit, $15,000 target price. Ships end of summer 2026.
GitHub: github.com/asimovinc/asimov-…
Manual: manual.asimov.inc
DIY Kit: asimov.inc/diy-kit
Most humanoid robots are controlled by the companies that build them. Asimov v1 is built for the rest of us. Build it, test it, and share your feedback with the community.
6
20
95
8,488
Sai Kishor Kothakota retweeted

Apr 29
I trained a grasping policy on objects of various shapes and sizes using the new mjlab feature and this really cool pivot grasp strategy emerges for large flat objects that are larger than the gripper aperture. So cool and beautiful to see!
7
17
204
20,336
Sai Kishor Kothakota retweeted

Apr 28
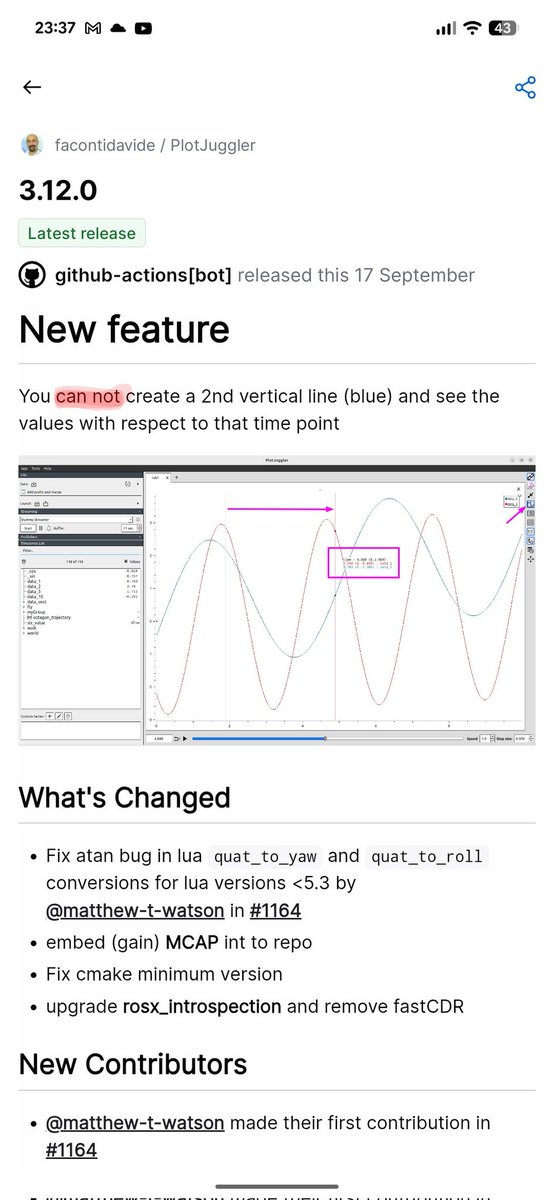
This is the most exciting #PlotJuggler release in a long time: 3.17.0!
There are so many things I am exited about, but the most important one, is the integration with Mosaico (link below).
Now PJ can download data directly from the cloud.
Thread 🧵👇
7
3
19
1,261
Sai Kishor Kothakota retweeted
Apr 24
We're open-sourcing Asimov v1's mechanical design on Monday 🧡
12
48
504
23,582

Claude can actually do CAD now in @Onshape
Here it worked for an hour and built a 4-part monitor arm, starting only from a sketch and description. The trick was to give it the tools to look at its own work.
Introducing: Jarvis Onshape MCP
57
206
2,258
283,748
Sai Kishor Kothakota retweeted

FlashSAC is out — when XQC meets SimbaV2 massively parallel simulation. Stable off-policy RL for high-dimensional robot control. 50 tasks, 10 simulators, sim-to-real humanoid walking in just minutes. Very proud to be a part. CrossQ-style batch norm keeps winning in deep RL 🚀
Apr 7

We scaled off-policy RL to sim-to-real.
To our knowledge, FlashSAC is the fastest and most performant RL algorithm across IsaacLab, MuJoCo Playground, and many more, all with a single set of hyperparameters.
Project page: holiday-robot.github.io/Flas…
Paper: arxiv.org/pdf/2604.04539
4
23
1,248
Sai Kishor Kothakota retweeted
Apr 16
Posted v1.4 roadmap for mjlab: linkage modeling, finding and crushing all NaNs, per-world meshes, and better RL-library support. If something on the list should move up, or I've missed something important, comment on the issue: github.com/mujocolab/mjlab/i…
3
43
1,716
Sai Kishor Kothakota retweeted

Apr 14
FlashSAC is a new RL method for robotics that fixes a core problem
PPO is stable but wastes data
Off-policy methods reuse data but are slow and unstable
FlashSAC combines both advantages
fast training stable learning even in high dimensional robots
3
23
135
8,715
Sai Kishor Kothakota retweeted

Apr 15
Headline new features from MuJoCo 3.7:
DC motor actuator, midpoint integrator for super stable free bodies, and improved equality constraints.
mujoco.readthedocs.io/en/sta…
4
9
126
8,609
We’re hiring a Reinforcement Learning Engineer 🤖
Join us to tackle real-world challenges with humanoid robots.
Apply or reach out!
linkedin.com/jobs/view/44015…
1
4
48
2,836

$5,900 — Unitree just put its next humanoid into global sale🤖
After G1 quietly became one of the most in-demand humanoid platforms, Unitree is now pushing R1 overseas via AliExpress, targeting North America, Europe, Japan, and Singapore.
Same company, different playbook: lower price, faster scale.
R1 comes in at $5,900, with a lighter AIR version at $4,900 — a sharp drop from G1’s 99,000 RMB (~$16K ) entry point.
It’s a 123 cm humanoid, weighing about 29 kg, with up to 26 DOF across legs and arms.
The lighter R1 AIR drops to 27 kg with 20 DOF, built for more agile, lightweight deployment.
This isn’t a concept rollout.
Unitree already went through the demand phase last year.
Globally, G1 has already secured strong demand across research, education, and commercial applications, with supply struggling to keep up at one point.
Now they’re catching up.
Unitree says its humanoid shipments crossed 5,500 units in 2025, with total production above 6,500 units. Orders were higher than deliveries — meaning backlog, not lack of interest.
That context changes how R1 lands.
This isn’t about “another robot launch.”
It’s the next unit in a pipeline that’s already selling, scaling, and shipping.
G1 proved people want humanoids.
R1 is what happens when you try to meet that demand — cheaper, broader, global.
15
43
169
9,020