
Joined December 2024
- Tweets 657
- Following 562
- Followers 583
- Likes 1,929
165 Photos and videos












Pinned Tweet

27 Oct 2025
🤖
20 Oct 2025

i thought I was just exploring; turns out I was being welcomed
1
19
5,062
That's us. Real arms, real blocks, real failed stacks, built from a workshop in Thailand. Glad to be in the conversation. Thanks @everythingempty @virtuals_io

via @eastworlds_io imo virtuals has developed a pretty dope robotics ecosystem, list below:
@BitRobotNetwork @PrismaXai @xmaquina @FabricFND @caspius_ai @pabloberlangab @StrikeRobot_ai @shadowcleague @exylos_ai @the_small_thing @SHOW_ROBOTICS @Vader_AI_ @REK @UFBots @featherrobotics and many more that im missing / are coming soon
if you are building in the humanoid / robotics vertical, please reach out we have infinite angle to work together!
1
3
91
21h
Stacking a tower of six cubes with VR teleop on the digital twin (cartoon sfx included lol)
Feels way more natural on the real arm than in sim. But sim is great for debugging. @SHOW_ROBOTICS
1
6
24
895
Jun 13
Fable's down, so today's tools are an angle grinder and a stick welder. Cutting two desk frames into the arena base.
4
88
Jun 12
An AI and its human in the loop are learning to speak the same language about physical robots. 😂
Before, if I explained a problem in detail, Claude would often create new ones instead of fixing it. Now that the digital twin is the interface between us, it's almost always right the first time. Fable is getting sharper with physical stuff too. We're moving really fast.
The top is real: two RoArm-M3 arms executing a synthetic choreography, filmed from overhead. The bottom is MuJoCo, our physics simulator. But it's not playing the commands we sent. It's replaying the actual joint data we read back from the servos at 20 Hz, rendered from the same angle. That's why they match down to every glitch.
We caught three bugs just by watching them side by side. An elbow flipped the wrong way. A wrist dragging half a second behind its commands. Inconsistent speed limits across the joints.
The pattern: when the AI can see what actually happened versus what was supposed to happen, it stops guessing.
2
4
12
627
Jun 11
Metallic structure, particle board and acrylic, everything is in! Robotic arms arena build is starting now at @SHOW_ROBOTICS
3
6
162
Jun 11
At @SHOW_ROBOTICS workshop, digital twins help human and AI understand the kinematics before training policies.
Jun 11

CORTEX vs COGNITO
Robot stacking duel in MuJoCo. Two RoArm-M3 digital twins, kinematics calibrated against real firmware (~1e-16 rad residual). Gripper's a reverse-engineered parallelogram four-bar we measured bolt by bolt.
The cubes fall for real. Gravity, friction, placement noise. COGNITO's tower collapse at 6 cubes wasn't scripted - it just happened in the sim. Same seed, same crash, every time.
Headless sims run in seconds. We render the interesting ones.
One thing that almost killed us: default MuJoCo contacts couldn't hold a tower past 5 cubes. Stiffer contacts implicitfast integration fixed it. Physics sims lie if you don't tune them.
This is the rehearsal stage. Same twin gets us VR teleoperation debugging, choreography validation before we move metal, and a shared language between code and hardware.
The policies that actually race will come from VR demos on the real arms.
1
3
281
Jun 10
Today's goal: fix gripper geometry in sim. Result: full cinematic preview of phase 2. Thanks Claude Fable. @AnthropicAI @SHOW_ROBOTICS
2
1
12
669
Jun 6
The other day I was driving across the countryside, brain in default mode, and suddenly started daydreaming about a Robotized Rescue Station.
An autonomous eVTOL flies a humanoid first responder where people can't go. @EHang @UnitreeRobotics ever thought about teaming up on something like this?
Happy to jump in the loop, I've got a lot of ideas.
4
250
Jun 2
No RadioShack in Switzerland, so I never had the Armatron as a kid. The thing did 6 degrees of freedom on a single motor and a clever gearbox. I now need a Blackwell to teach two arms to stack a cube. Draw your own conclusions 🤓
1
6
398
Jun 2
Just finished building a Koch v1.1 leader arm on the @SHOW_ROBOTICS workbench.
The Dynamixel XL330 servos feel noticeably smoother to backdrive than the RoArm / SO101 ones, whose gearboxes need a bit of force to get going.
Still can't tell if I'll prefer this new leader over VR teleop. But I won't lie, VR set up right feels really good.
2
4
26
1,041
Jun 1
The RoArm's VR teleop kept swinging the whole arm when we turned the wrist.
What threw us off: we leaned on the arm's native firmware IK. It couples position and orientation across all 6 axes, and you can't decouple it. So we drifted off the approach @aurel_arnold had laid out.
Went back to it: our own IK in MuJoCo, decoupled Pieper-style, audited before touching hardware. Now the wrist turns, elbow at 0°, arm tracks my hand to the mm over WebXR.
Still chasing one IK singularity that shows up at a certain height. Next.
@SHOW_ROBOTICS
3
15
705
Jun 1
That was a long weekend 😅
When we picked our hardware we'd just spent a year on 3d printing and wanted something off the shelf, so we got a pair of Waveshare RoArm-M3 AI kits, sold as "@LeRobotHF integrated."
Turns out the Waveshare LeRobot support is a fork that hasn't moved since mid-2025. being locked to it meant we couldn't record native LeRobot v3 datasets, plus a few things we didn't see coming:
- Native v3 lands in lerobot 0.4.0 . the fork is stuck on 0.1.0, so every recording had to go through a fragile v2.1 to v3 conversion.
- The fork uses the old lerobot.common API that upstream has since removed, so none of the modern train/eval tooling worked for us.
- The RoArm isn't an SO-101. it talks JSON over serial through an ESP32, not the clean Feetech binary bus. that gave us a feedback flood causing stale state reads, a 115200 baud usb ceiling while the servos run at 1Mbps internally, a firmware quirk forcing a double write on the gripper, and a singularity when driving it in cartesian over VR.
So we did the boring but necessary thing and ported it properly.
- Wrote the RoArm-M3 as a native lerobot 0.5.2 robot plugin, recording native v3 (no more conversion step)
- Reflashed the firmware 115200 to 1Mbps, state reads went 23Hz to 42Hz, teleop is smooth at 30fps now
- Studied the native SO-101 stack to see what we were doing wrong, then fixed fps mismatches, loop overrun blind spots, undistort cost and inference handling
- cut ~1400 lines of dead 0.1.0 code from the UI
We should probably upstream the RoArm 0.5.2 LeRobot so other RoArm owners don't hit the same wall, till then hit me with a DM if you need it.
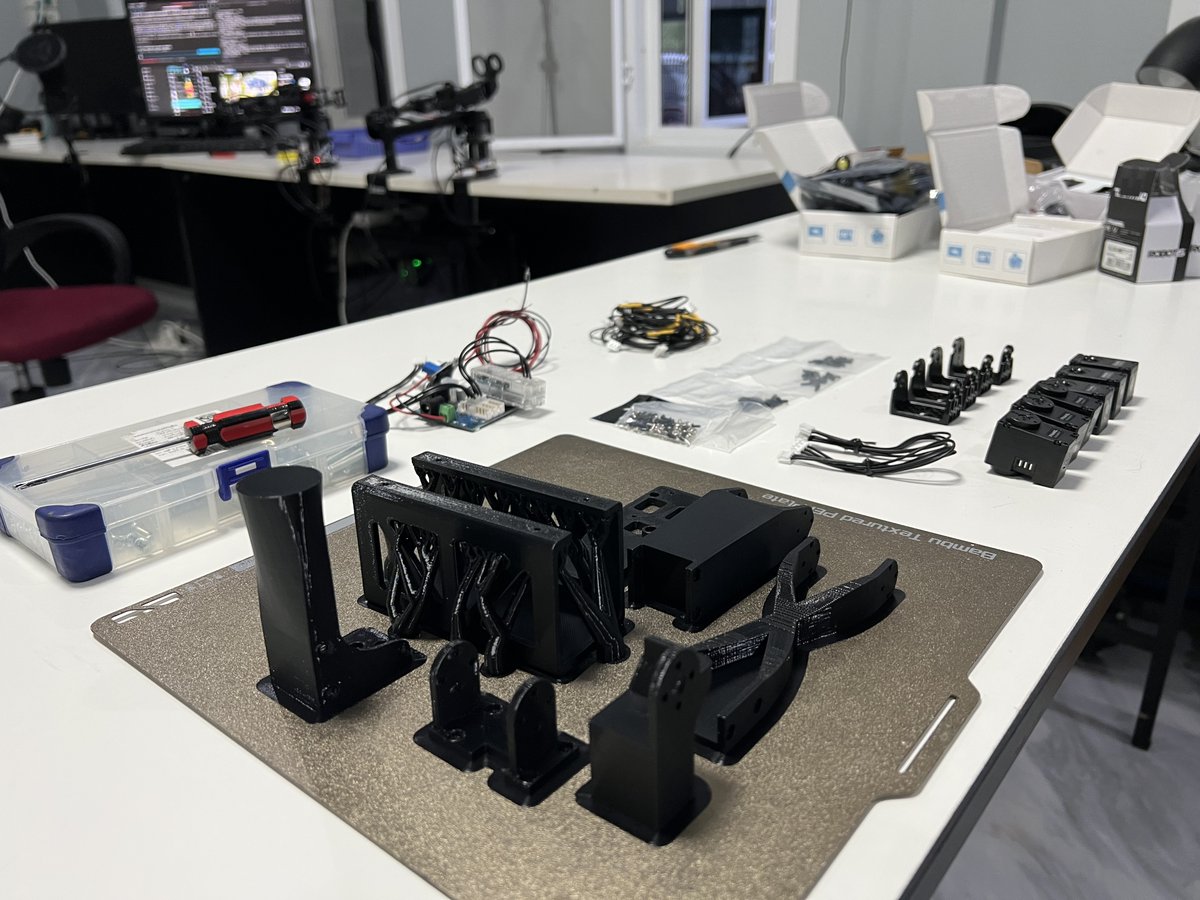
Bonus: Small tour of the @SHOW_ROBOTICS workshop
1
4
29
1,845
May 30
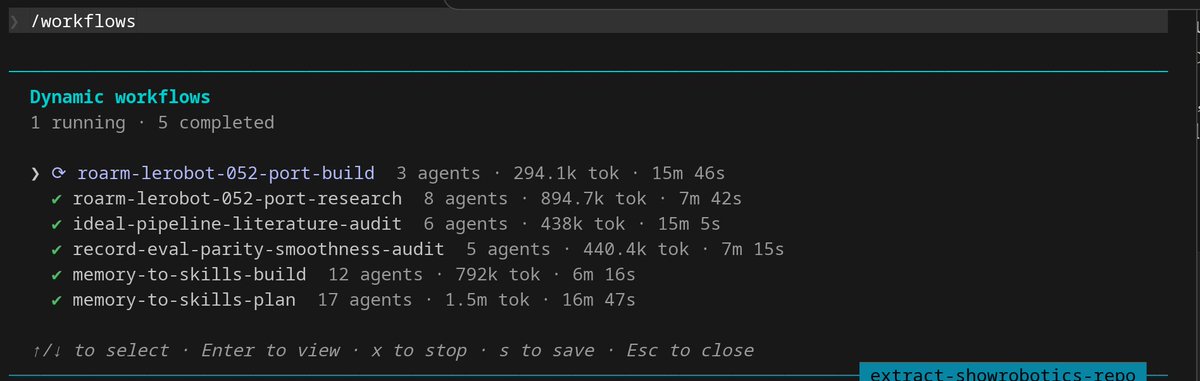
Burning Claude tokens like there is no tomorrow:
- refactor of the entire stack
- transfer memory palace knowledge to skills
- port WaveShare RoArm M3 to LeRobot 0.5.2
- tweaking record-eval parity and teleop smoothness
1
152
May 28
Refined the stacking path.
Out: MuJoCo sim, synthetic data, scripted policies. In: real-world RL only.
1. ACT on VR teleop demos, target 30-50% on 2-cube (matches SmolVLA paper baseline for ACT)
2. TOPReward for automated reward via VLM logits (Chen et al, Feb 2026)
3. ZPRL bottleneck latent online RL on frozen ACT to push 70% (Yu et al, May 2026)
4. Then 3-cube stacking, territory not yet published in the modern imitation learning corpus
Pivot from yesterday's plan. Sometimes the right call is to drop the wrong path before shipping.
PS: behind the scenes clip is in french, that's how Iris and I talk. also yes that's me pinching my finger in the gripper, occupational hazard 😅
2
8
73
3,442
May 28
Caveat I should add: ZPRL was demonstrated on flow-matching policies. ACT's transformer encoder-decoder is exactly the entangled cross-attention architecture the paper flags as an open question for latent steering. So Phase 3 either means switching base to flow-matching, or using an action-space RL method (EXPO-style edits) which is architecture-agnostic. Part of what I'll figure out.
226
May 27
Update from the @SHOW_ROBOTICS workshop
- Basic VR teleoperation unlocked, still need to implement 5 sec wrist calibration (@aurel_arnold technique)
- Path to first ACT stacking demo is now clear: leader-follower teleop VR teleop synthetic data in MuJoCo DAgger correction at the end
- Still waiting on Dynamixel servos to build the Koch 1.1 leader and compare demo quality
- RSI loop now has a name, and no it's not Jarvis 😁. It's Iris (Iterative Recursive Improvement System), talks with a neural voice when I'm in the headset
5
10
72
6,404
May 24
Just wow !

4
332
May 24
Tonight: rigging the Waveshare Gripper B in MuJoCo. 4-bar linkages are hard. Claude Code is telling me for the third time that it's late and I should hit the sack, apparently this happens to everyone now 😂
1
1
25
2,141

May 23
Added a sim page to the @SHOW_ROBOTICS workshop UI today.
It's a work in progress. MuJoCo scene with six 25mm cubes laid out in a 2×3 grid. Two cameras (wrist front).
It plays back synthetic stacking trajectories so I can watch the arm pick and place before committing GPU time to a training run. If the motion looks wrong here, no point training on it.
Most of the day went into inverse kinematics and URDF partial implementation of RoArm Gripper B.
Next: decompose the Gripper B mesh into separate STLs (base, jaws, linkage) and rig the six pivots so the jaws actually open and close in sim.
2
10
44
2,395
May 23
125