
Joined November 2010
- Tweets 14,327
- Following 469
- Followers 1,806
- Likes 4,273
Photos and videos


13 Jul 2025
Amusing podcast where @ezraklein plays Larry Gopnik to Mark Epstein's Nachtner
open.spotify.com/episode/1YW…
106
7 Oct 2024
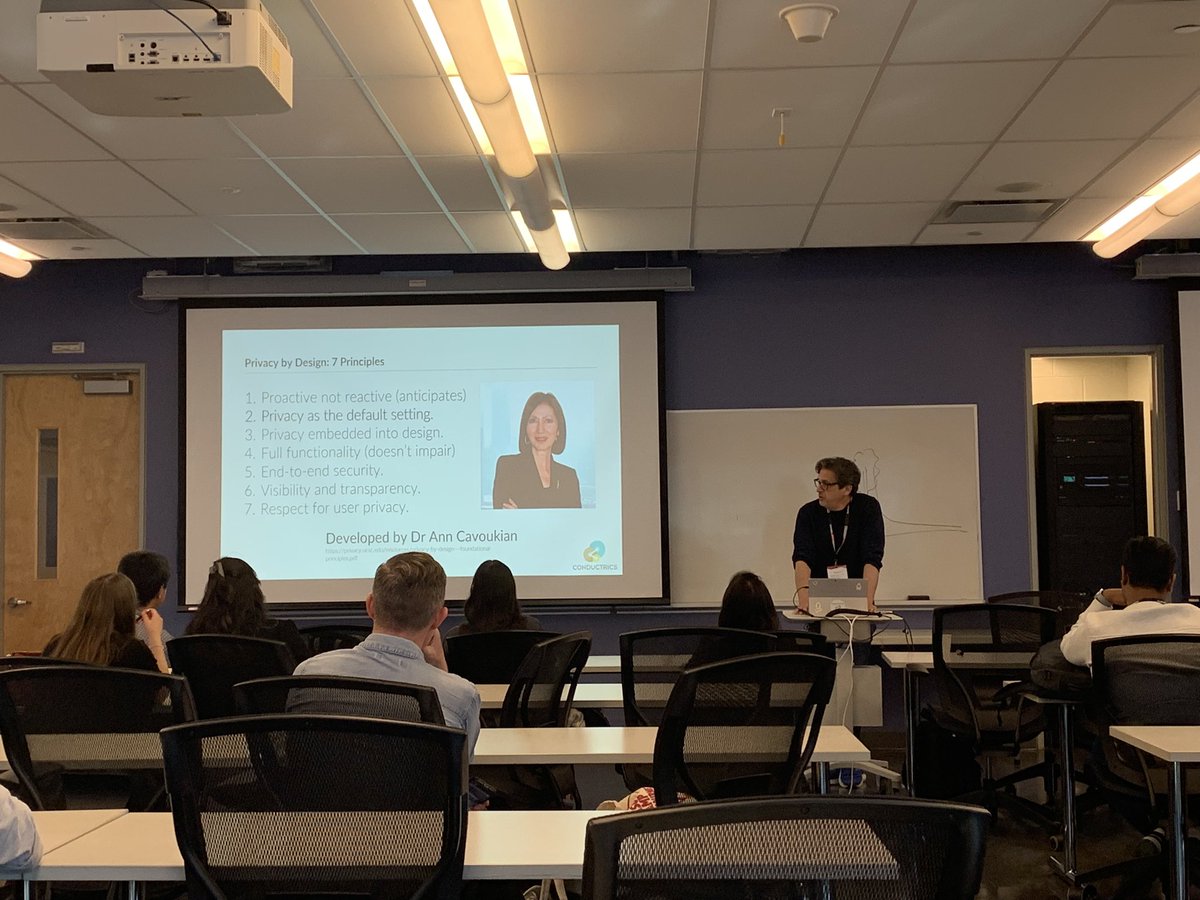
Good fun at #measurecamptoronto talking about Privacy by design and how applying data minimization gets you both K-anonymization AND ability to efficiently construct Gramian matrices for OLS.
5 Oct 2024

Pure bias reinforcing dopamine right there. @mgershoff summarizes #PrivacybyDesign at #measurecampto
2
207
19 Sep 2024
Off to London for @MeasureCampLDN
We have a new batch of Conductrics INC Select whiskey from @MilamandGreene over here from Texas and alfajores direct from Buenos Aires as prizes and give aways.
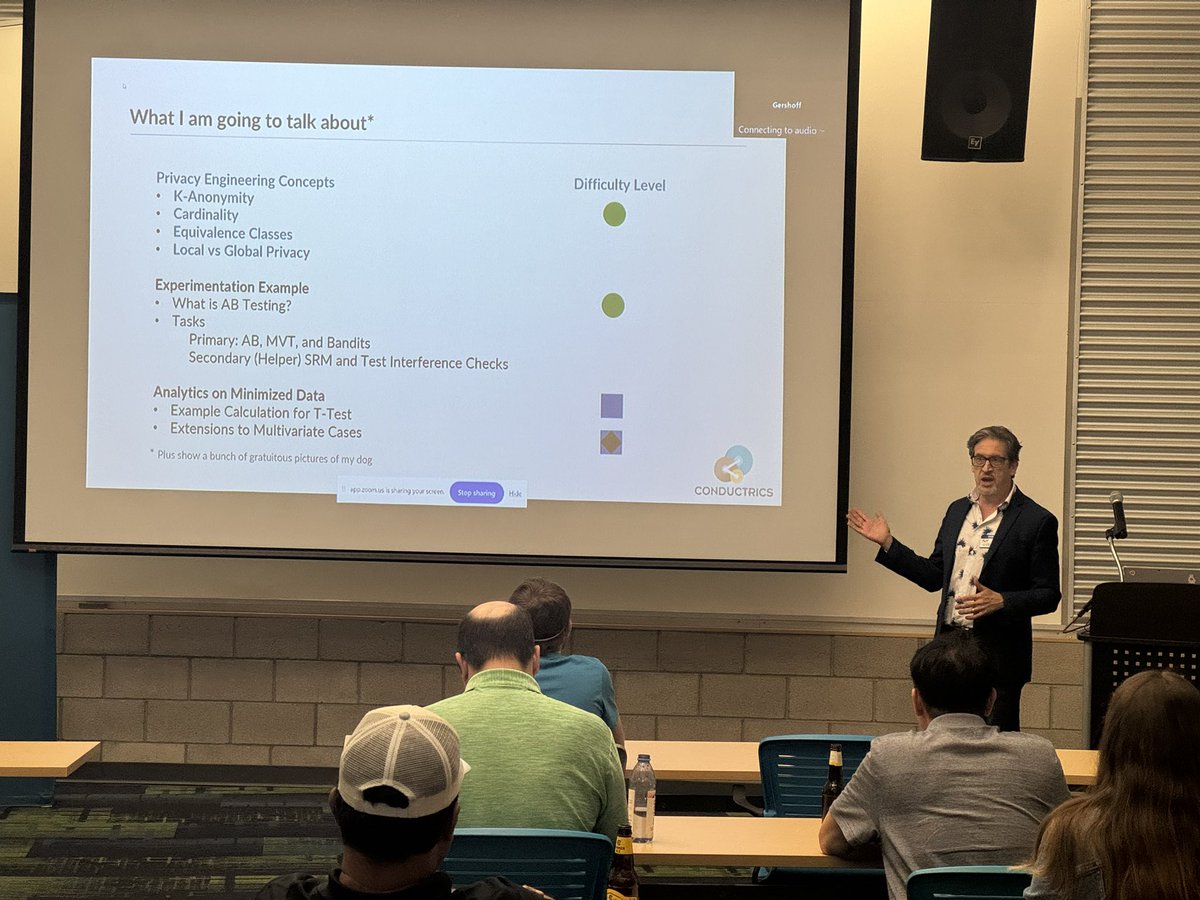
For talks I will do something on Privacy Engineering and AB Testing.
1
1
9
382
3 Sep 2024
tl;dl Privacy by design & customer first philosophy, if not two sides of the same coin, are consistent with each other.
Collecting customer data is akin to asking for something. Customer first means asking from customers only when its a GOOD FAITH attempt to enrich THEIR lives.
3 Sep 2024

"Collect everything" is easy to say. It can even be rationalized. Think a little deeper, though, and the dangers of this mindset are pretty easy to surface. That's the topic of our latest episode with @mgershoff! analyticshour.io/2024/09/03/…
1
6
296

14 Aug 2024
I know people and I still haven't been able to get a bottle from the Wildlife collection. Gotta up my click submit game.
@MilamandGreene
prweb.com/releases/beep-beep…
1
1
122
13 Aug 2024
Ride Sharing product idea.
User Setting Toggle for accept/decline "air freshener'.
4
115
8 Aug 2024
Great. As an extension to her note about effects heterogeneity. I think it is more that contextual bandits/Targeting is unlikely to be valuable unless there is a theory why there should be heterogeneity. If you don't then just run a simple RCT or Epsilon-First bandit.
7 Aug 2024

These recent slides from Susan Athey and Guido Imbens at NBER are a great recent review of the most valuable data science methods I'm aware of. They cover tons of ground with lots of pointers.
conference.nber.org/confer/2…

1
217

3 Jul 2024
Do you mind if I DM you here on X @thegautamkamath ? If not no worries. Was looking for some links/follow up around a quick question on the dual view of the Diff Privacy and Pearson-Neyman Hypth Testing.
1
2
138
2 Jul 2024
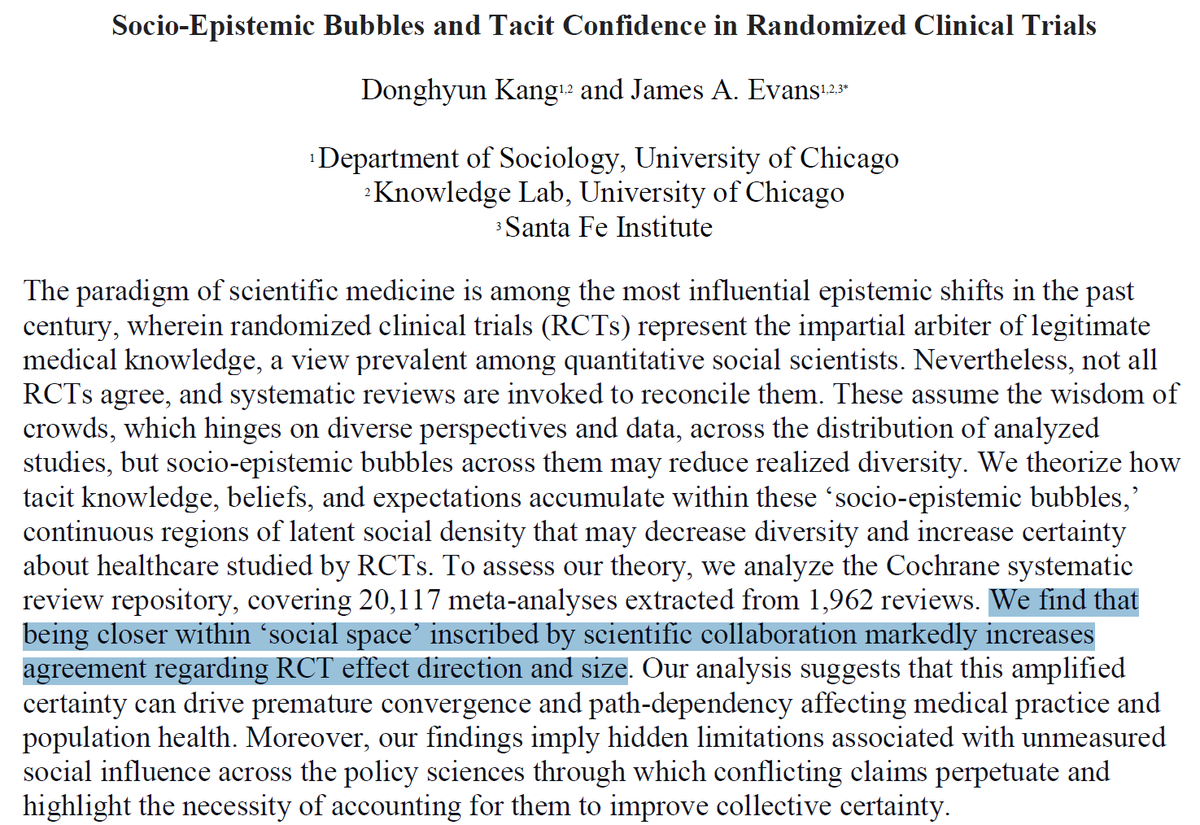
Oh! I have to read. I have been thinking informally about this for Tech/Data Science - that methodological preferences etc. are drawn from individuals who are clustered (in part by being socially connected in the valley via a small set of interconnected VCs)

1. osf.io/preprints/socarxiv/2a…
Meta-analyses combine trials that are presumably *independent*. But social relatedness between researchers --> more similar effect estimates, suggesting dependency via same "school of thought"
4
248
23 Jun 2024
I had the honor to chat with Debra J. Farber (@privacyguru) a few weeks ago on the Shifting Privacy Left podcast.
We talked about #ABtesting, Privacy by Design, and acting intentionally.
You can listen here
shiftingprivacyleft.buzzspro…
2
91
9 Apr 2024
I had assumed that @AmericanAir rewards work like other programs with a default option if you don't select before new year. But I just discovered for AA there is no default and you just lose the rewards. So they needlessly alienate their loyal customers (I'm 6 yr Ex Plat)🤣
1
1
239
2 Apr 2024
Thanks @NandoDF ! BTW this 2009 talk covers much of what @ilyasut discusses in a bit of detail but uses GZIP as the compressor as the example algo rather than a NN/LLM
wiki.santafe.edu/images/9/9a…
29 Mar 2024

Predicting the next word "only" is sufficient for language models to learn a large body of knowledge that enables then to code, answer questions, understand many topics, chat, and so on.
This is clear to many researchers now, and there are nice tutorials on why this works by @ilyasut resorting to compression ( youtube.com/watch?v=AKMuA_TV… ) and by @geoffreyhinton ( youtube.com/watch?v=iHCeAotH… ).
However, the emergence of types of understanding is not unique to language models. In arxiv.org/pdf/1804.06318.pdf by @notmisha and @brandondamos the authors trained models to predict the next few time stems of over a hundred robot hand sensors (Touch, Gyro, Accelerometer, Joint Info, Actuator Info, etc.). They ten found out that they could regress the shape of the thing the hand was touching from the activations of the neural networks using probes. That is, the model developed an internal representation of shapes even though it was simply used to predict "only" the next few senses. Awareness follows from simple predictions and interaction with the world.
1
213
28 Dec 2023
I think it might be helpful if the first few sections, or first few minutes of each section, was dedicated to the history/context. So a little narrative including folks like Hume, Popper, Laplace (Bayes), Neyman/Pearson, maybe Stein etc. just to provide context. @PhDemetri
28 Dec 2023

IMO, the only thing an intro stats student really must learn is that the goal of "statistics" (inference, really) is to quantify uncertainty. Too many students get so lost in the mechanics that they loose site of what they are trying to do.
3
552
19 Dec 2023
Post at @Conductrics discussing a some Privacy Engineering ideas in the context of AB Testing.
tl;dr
Many standard stats can be calculated on aggregated data without need to link to individuals. Useful when cardinality of feature set << Individuals.
blog.conductrics.com/privacy…
6
282
28 Nov 2023
Has the author flown intra-Europe lately (like in the past 5 yrs? Of course main thing is to get from place to place safely and so far so good. But there is next to ZERO added niceties in the Euro Econ cabin (At least on BA, Finnair, Norwegian)
nytimes.com/2023/11/22/trave…
119
9 Nov 2023
Why this might be so consider that SQL is a sublanguage based on the relational algebra. Both the relational algebra and the relational calculus (see: Codd' theorem) are implementations of First Order Logic on databases. So thinking in SQL makes you think like Spock - logical.
9 Nov 2023

This is so very, very true. SQL is one of the most valuable skills for anyone working with data. It’s more than just about how to run queries - it helps you understand the entities you are querying better, and it gives you stronger mental models to make sense of the world.
1
7
828