
Joined June 2024
- Tweets 452
- Following 235
- Followers 938
- Likes 270
347 Photos and videos








Pinned Tweet
Our blueprint for the "Optimal Universal Robot":
❌ Legs: Too complex, too expensive. ✅ Wheels: Fast, stable, 10x cheaper.
❌ Rotary Joints: Massive torque stress, custom gears. ✅ Of the shelf parts & linear actuators: High payload, extrem simplicity, off-the-shelf parts.
41
98
675
61,539
We are pleased to inform that we are attending @LDNTechWeek and @GITEXEUROPE
Please DM to meet.
#LondonTechWeek #Gitex #robotics #AI
47
A humanoid robot just beat a human in a 10-hour pick-and-place stream. No breaks, no fatigue, pure efficiency. But at $100k , the price tag is holding back a massive corporate shift.
The real question: Do we actually need humanoids for this?
#Robotics #Automation
61
45
233
35,407
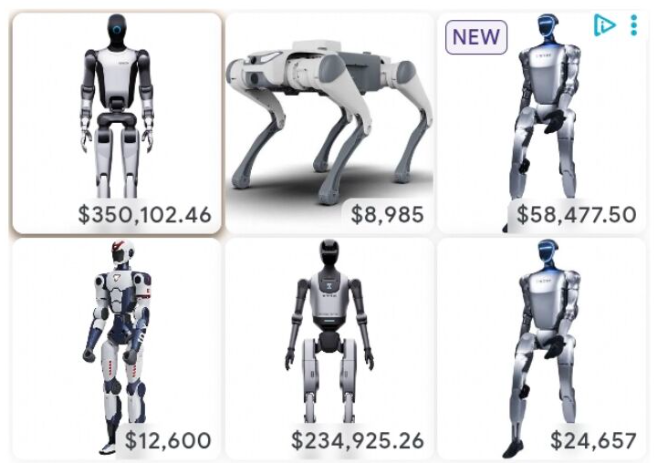
The actual cost of humanoid robots (a few kilograms of payload). Would you buy one, or would you prefer to try our universal mobile manipulator design? :)
212
Working on connecting Nav2, and MoveIt in ROS for the most efficient and convenient "pick and place" solution in universal robotics. What do you think?
#robotics #physicalAI
1
1
11
1,067
Fast and simple pick and place example using @OpenRoboticsOrg ROS and default MoveIt.
Check out our repo to play with that.
#openrobotics #ROS #MoveIt #OpenSource
2
6
901
Exciting news! 🚀 We’ve released the first Motion Planning & ROS package for our open-source mobile manipulator.
Select an object & a shelf—the system calculates the optimal base, arm, and hand trajectories for seamless pick-and-place. 🤖🦾
Code: github.com/obotx/open-source…
1
11
84
5,083
We are proud to announce that we are a finalist in a prestigious robotics contest. It's an honour to be in such a great group of innovative companies.
#robotics #ai #humanoids
2
5
30
2,793
Think humanoids are the only way to conquer stairs? Think again. 🤖🚀
New universal mobile manipulators are proving that wheels can climb too
#Robotics #Innovation #FutureTech #Automation
3
2
16
692
BIG NEWS: ObotX raised $120M! 🚀
Forget over-engineered jumping humanoids. We’re scaling universal mobile manipulators using engineering simplicity and off-the-shelf parts.
The goal: 10M robots, $1B MRR from monthly software subscription controlling the robot.
Details below👇
8
27
132
20,349
Progress on our universal mobile manipulator. We believe this is the optimal construction (cost-efficiency). How do you like it? :) Stay tuned for the next milestones.
1
3
10
627
Why are we still building monolithic robots? 🤖❌
In the 90s, we upgraded PCs part-by-part. We’re doing the same for robots.
✅ Exchangeable parts (hands, bases, sensors)
✅ Multiple simple robots cooperating on complex tasks
✅ Lower costs easier maintenance
1
6
520
Universal mobile manipulators have a much greater chance of becoming the future of mass robotics than humanoid robots: 99% of the needed use cases are flat floors and stairs, where wheels are much more efficient (energy, speed, stability, cost, etc.).
They also cost 10 x less
1
9
409

3 Dec 2025
We are thrilled to announce the release of our latest open-source Mobile Manipulator Github repository. This release marks a significant milestone in our mission to make advanced robotics accessible to everyone.
🔗 Explore the repo in comments link. Please add star on Github
1
2
6
416
26 Nov 2025
Progress on our super simple universal manipulator, solving 99% humanoid use cases with 10x higher load capacity and 10x lower costs.
Anyone interested in the source codes and construction repository? :)
Please comment and follow to get updates.
#robotics #humanoids
1
2
328
3 Nov 2025
Mobile manipulator use case: arranging products on shelves in the store. Physically accurate simulation made in Google DeepMind MuJoCo. Full autonomy achieved with MPC strategy and PID operation.
1
271