
Joined May 2013
- Tweets 846
- Following 415
- Followers 28,591
- Likes 2,214
172 Photos and videos









Pinned Tweet

Apr 8
We hosted Prof. Alyosha Efros (UC Berkeley) at @SkildAI! He didn't believe that robots could actually cook eggs reliably. :)
Tested back-to-back 5times without fail! One batch of scrambled eggs every ~2.5mins nonstop. The same model assembles a GPU on a server rack too.
38
157
1,334
172,310
Deepak Pathak retweeted

Jun 11
Congratulations to @berkeley_ai alumnus @pathak2206 who has been awarded the PAMI Young Researcher in Computer Vision Award!
This top award for young researchers in computer vision is given to two recipients yearly.
thecvf.com/?page_id=413#YRA
2
6
79
10,993
Jun 11
Force is arguably the most overlooked ingredient in modern robot learning.
Introducing FACTR 2: it turns *any* commodity robot into a force-aware system with no force sensors required.
Train a tiny force network in <1min with <10mins of data and drop it into any existing teleop pipelines:
✅ Free force sensing for both the robot and the operator arm
✅ Makes demos higher-quality → fewer of them needed.
✅ A new force-aware learning algorithm (FIRST) uses those recovered forces to figure out which parts of a demo actually matter, making learning data-efficient.
✅ Strong performance on complex tasks with fewer demos and even no pretraining!
More details below.
Jun 11

💥Introducing FACTR 2, learning external force sensing on commodity robot arms without needing dedicated sensors.
We show that learned force signals enable force-feedback teleop on low-cost arms and improve BC policies.
FACTR 2 consists of:
1. Neural External Torque (NEXT): learns external forces without needing dedicated force sensors.
2. Force-Informed Re-Sampling Training (FIRST): uses the learned force signal to identify task-critical regions and upsample them during training.
w/ @StevenOh_ @_tonytao_
🧵(1/N)
6
52
393
36,530
Jun 10
I’m deeply grateful to receive the PAMI Young Researcher Award. This recognition is a reflection of the exceptional students, colleagues, collaborators, and mentors I’ve had the privilege to learn from and work alongside. 🙏😇
Thanks, TC PAMI and @CVPR, for this honor.

Exciting news! 🎉 Our CEO & Co-founder, Deepak Pathak (@pathak2206), received the PAMI Young Researcher Award at #CVPR2026 this week.
Among the highest honors in computer vision for early-career researchers, the award recognizes groundbreaking contributions that have a lasting impact on the field of AI.
Congratulations, Deepak!

30
6
365
44,409
Deepak Pathak retweeted

May 4
Update: This work has been accepted at ICML 🎉
We’ve also released our code, model weights, dataset and all resources here:
github.com/Sim2Reason/Sim2Re…
Apr 16

What if AI learned physics the way Newton did – by experiencing it?
We built Sim2Reason: train LLMs inside virtual worlds governed by real physics laws, zero human annotation.
Result: 5–10% improvement on International Physics Olympiad, zero-shot. 🧵
9
65
550
57,203
Deepak Pathak retweeted

Apr 17
🚀 Excited to share ViPRA: Video Prediction for Robot Actions
📍 Accepted to #ICLR2026 @iclr_conf
🏆 Best Paper — #NeurIPS2025 Embodied World Models Workshop
Robot learning today still needs millions of action labeled videos.
Yet videos are abundant — from humans and the web — but lack action labels. Meanwhile, pretrained video models already learn rich dynamics.
ViPRA is a recipe for turning pretrained video models into robot policies while enabling robot learning to scale with actionless videos.
🧵 Thread ↓
2
40
268
25,522
Deepak Pathak retweeted

Apr 22
What if one AI brain could run every robot on the planet—from a humanoid to a warehouse arm—all at once? 🧠
@pathak2206, CEO and Co-Founder, and Abhinav Gupta, President and Co-Founder of @SkildAI, explain how they are building "OmniBrain," a universal foundation model designed to generalize intelligence across any robot form factor and task.
📺 Watch the episode: nvda.ws/4mKYvVu
10
27
167
25,873
Deepak Pathak retweeted

Given how everyone are refining their research ideas with LLMs, I definitely think training LLMs with simulated and real world videos and data would go a long way in research iterations. Probably OAI and Anthropic should use such pipelines with the growing robotic data!!
Apr 16

Excited to share Sim2Reason -- training LLMs in simulation to learn Olympiad-level physics (mechanics)!
Today, LLMs learn science by reading what humans have already written, absorbing distilled knowledge from textbooks and the internet. But human-annotated physics data is fundamentally scarce, and that bottleneck isn't going away.
Analogy to robotics: Sim2Real transformed robotics, where we train in simulation and deploy zero-shot in the real world. We do not try to teach robots by describing physics to them, but they have to experience it.
Approach: Our Sim2Reason makes the same bet we made in robotics -- skip the descriptions, go straight to the source. Let models learn directly from simulated worlds, observing how objects move, collide, and interact, much like scientists build intuition through experiment.
Result: Models trained purely on simulated experience develop transferable physical reasoning skills, improving even on problems that were never simulated. Zero-shot gains on IPhO, IIT JEE Advanced, OlympiadBench — problems the model never saw during training.
2
2
9
3,583

Let models learn directly from simulated worlds, observing how objects move, collide, and interact, much like scientists build intuition through experiment.
모델이 물리적 상호작용에 대한 예측을 할 수 있다면, 곧 내부적으로 월드모델을 가지게 될것이다. 마치 사람처럼.
Apr 16
Excited to share Sim2Reason -- training LLMs in simulation to learn Olympiad-level physics (mechanics)!
Today, LLMs learn science by reading what humans have already written, absorbing distilled knowledge from textbooks and the internet. But human-annotated physics data is fundamentally scarce, and that bottleneck isn't going away.
Analogy to robotics: Sim2Real transformed robotics, where we train in simulation and deploy zero-shot in the real world. We do not try to teach robots by describing physics to them, but they have to experience it.
Approach: Our Sim2Reason makes the same bet we made in robotics -- skip the descriptions, go straight to the source. Let models learn directly from simulated worlds, observing how objects move, collide, and interact, much like scientists build intuition through experiment.
Result: Models trained purely on simulated experience develop transferable physical reasoning skills, improving even on problems that were never simulated. Zero-shot gains on IPhO, IIT JEE Advanced, OlympiadBench — problems the model never saw during training.
1
1
12
2,975
Apr 16
Excited to share Sim2Reason -- training LLMs in simulation to learn Olympiad-level physics (mechanics)!
Today, LLMs learn science by reading what humans have already written, absorbing distilled knowledge from textbooks and the internet. But human-annotated physics data is fundamentally scarce, and that bottleneck isn't going away.
Analogy to robotics: Sim2Real transformed robotics, where we train in simulation and deploy zero-shot in the real world. We do not try to teach robots by describing physics to them, but they have to experience it.
Approach: Our Sim2Reason makes the same bet we made in robotics -- skip the descriptions, go straight to the source. Let models learn directly from simulated worlds, observing how objects move, collide, and interact, much like scientists build intuition through experiment.
Result: Models trained purely on simulated experience develop transferable physical reasoning skills, improving even on problems that were never simulated. Zero-shot gains on IPhO, IIT JEE Advanced, OlympiadBench — problems the model never saw during training.
Apr 16
What if AI learned physics the way Newton did – by experiencing it?
We built Sim2Reason: train LLMs inside virtual worlds governed by real physics laws, zero human annotation.
Result: 5–10% improvement on International Physics Olympiad, zero-shot. 🧵
6
35
290
36,476
Deepak Pathak retweeted

Apr 16
🚨 BREAKING:
Skild AI acquires Zebra Technologies robotics division! 🤯
@SkildAI acquired the robotics division of @ZebraTechnology (formerly Fetch Robotics) to deploy their omni-bodied brain across warehouses, unlocking massive productivity gains and accelerating their data flywheel.
Most warehouse robotics solutions use classical approaches for navigation and routing, but many parts remain human-bottlenecked like moving objects between receptacles.
Zebra Technologies brings one of the most battle-tested warehouse robotics platforms in the industry.
Their Symmetry Fulfillment orchestration platform already coordinates tasks between robots and frontline workers using real-time data from Zebra wearable devices, proven in logistics environments where reliability is mandatory.
The Skild Brain is an omni-bodied foundation model that generalizes across embodiments without retraining from zero. Quadrupeds, humanoids, tabletop arms, mobile manipulators—the same underlying model operates all of them.
Adding the Skild Brain to Zebra's Symmetry platform means robots don't just follow instructions, actually they make informed decisions. The Symmetry platform will expand beyond its current footprint into new verticals, new use cases, and a wider range of robot form factors.
This accelerates Skild's data flywheel, bringing in more diverse data to train the omni-bodied brain.
@pathak2206 🔥
~~
♻️ Join the weekly robotics newsletter, and never miss any news → ziegler.substack.com
1
12
49
5,815
Apr 15
Excited to announce that @SkildAI has completed the acquisition of Zebra Technologies’ robotics arm (formerly Fetch Robotics).
By combining Zebra's human-robot orchestration platform with omnibodied Skild Brain, we plan to turn warehouses everywhere into hubs of hyper-efficiency.
Imagine a single platform, single brain optimizing every movement of robots as well as human workers in warehouses.
Many of us in the robotics community have used Fetch Robots in the past and have rooted for them over the years, so this acquisition is special for us in many ways.
13
27
344
78,966
Apr 15
Bloomberg article
x.com/business/status/204449…

Skild AI, a fast-rising startup that makes "brains" for robots, has bought the robotics automation division of Zebra Technologies bloomberg.com/news/articles/…
1
13
2,903
Apr 15
More details
x.com/SkildAI/status/2044554…
We have acquired Zebra Technologies’ robotics arm (formerly Fetch Robotics).
This is what happens when orchestration meets intelligence -- a major step toward fully autonomous warehouses.
More robots. More environments. One unified brain.
15
2,470
Deepak Pathak retweeted

Apr 15
Skild Brain preparing an omelet with everyday human tools.
The robot drops an eggshell into the bowl at one point but recovers and continues the task.
The ability to self-correct during edge cases is what will make robots dependable for complex, long-horizon missions.
Mar 19

At GTC 2026 Skild booth, @shikharbahl & @kmarinou_ demo Skild Brain operating autonomously from pixels to robot actions, doing busbar assembly for NVIDIA GB300 compute tray.
Skild uses the same omni-bodied base model for humanoids, quadrupeds, and variety of industrial robots.
3
17
81
14,846
Apr 8
We hosted Prof. Alyosha Efros (UC Berkeley) at @SkildAI! He didn't believe that robots could actually cook eggs reliably. :)
Tested back-to-back 5times without fail! One batch of scrambled eggs every ~2.5mins nonstop. The same model assembles a GPU on a server rack too.
38
157
1,334
172,310
Apr 8
Interestingly, it did drop eggshells once in the bowl, but recovered in an eggcellent way!
Same base end-to-end model (Skild Brain) across tasks, no stage-wise programming. Finetuned with a few hrs of data.
5
7
83
6,606
Apr 14
More details on Blackwell GPU assembly:
Mar 26
Robots assembling robot brain -- imagine this kind of robustness on every precision manufacturing line!
Live demo of GPU rack assembly at #NVIDIAGTC:
- end-to-end neural network (Skild Brain) finetuned with little data
- memory to perform long horizon task (placing jigs, 16 screwes, removing jigs)
- robust to disturbances and fast to set up
- no fancy sensors, just off-the-shelf arms and cameras
3
998
Apr 11
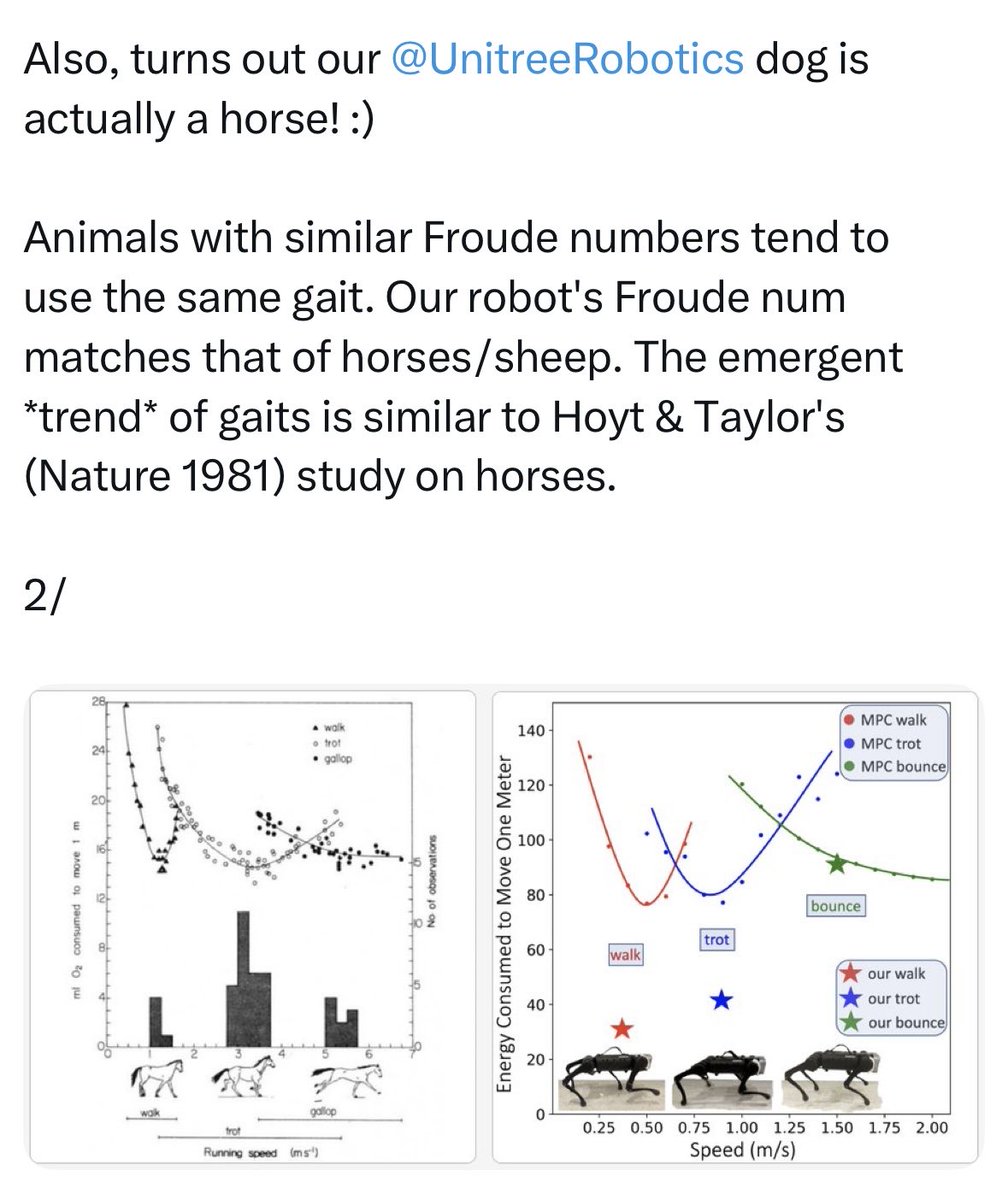
AFAIK this 2021 paper was sort of first “proof” (analysis by synthesis) of Hoyt and Taylor’s (Nature 1981) hypothesis from Biomechanics:
x.com/pathak2206/status/1518…
Apr 11

What are you referring to here when you say “science” oriented?
3
31
5,022
Deepak Pathak retweeted

Apr 11
Can't remember things from 5 years ago apparently
Apr 11
Oh no Chris — 5yrs ago, CoRL’21: emergent gait at high speed. This is probably one of our most “science” oriented papers in locomotion.
4
17
4,299