
Joined June 2009
- Tweets 1,473
- Following 802
- Followers 979
- Likes 1,680
502 Photos and videos






28 Oct 2025
Webcam showing severe flooding already in Jamaica:
skylinewebcams.com/en/webcam…
(click through to see actual live feed)
3
474
23 Sep 2025
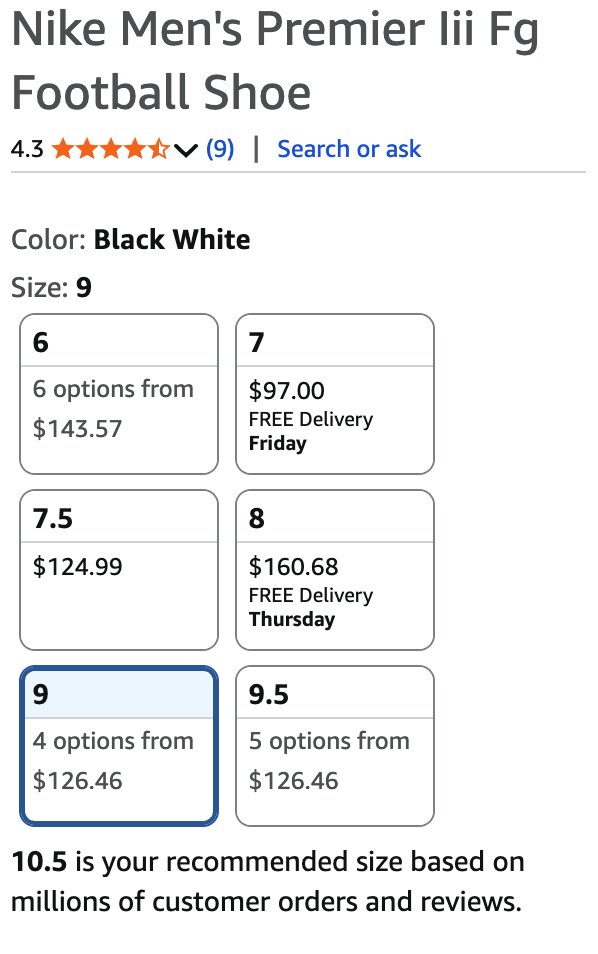
LOL, amazon recommending shoe size based on customer reviews...
1
3
137
15 Jul 2025
I'm excited to share that GWU is hosting a World Bank Symposium on AI & the Future of Human Capital.
For those not steeped in the development, Human Capital == people’s skills, knowledge, and health
worldbank.org/en/events/2025…
Some flexibility in the deadline may be possible.
1
4
293
Robert Pless retweeted

8 Jul 2025
This is what I’ve been up to the last year! Building the largest remote observatory in the world
(By quantity of scopes)

442
905
12,466
7,980,143
7 Jul 2025
I'm an Area Chair for NeurIPS this year. I spent most of today reviewing all the reviews for my 13 assigned papers to highlight insufficient reviews. A few reviews were incredibly shallow and some had hallmarks of GPT, and this was a chance to reject those. (1/4)
1
5
943
7 Jul 2025
In the past, as an area chair I would end up with a collection of reviews, some of which sucked, and would somewhat throw up my hands and say "these reviews aren't great and I have to decide based on them, but what can I do ... there are too many papers to do much else". (2/4)
2
280
7 Jul 2025
Finally, papers are routed to specific Area Chairs based on expertise. The research community isn't so big once you are in a specific area. I notice the community members that put extra effort into writing reviews, and those that don't. Thank you to those that do! (4/4)
1
106
7 Jul 2025
This step, where the executive decision maker is obliged to object to or approve of them, aligns the authority to make the decisions with the responsibility to get good reviews. Additionally, the Area Chairs see the name of the reviewer (I'm looking at you, reviewer #2). (3/4)
242
20 Jun 2025
Question: Does anyone have a pre-computed FAISS indices for large datasets (e.g. LAION 2B, 5B) that have been used to train CLIP-like models, and would be willing to share the index or access for queries?
The one below doesn't seem to work anymore: knn5.laion.ai/knn-service
1
169
29 Jan 2025
I'm lucky to get to work on important problems with really great researchers. @abby621 is talking about our research on image search tools to support sex trafficking investigations tomorrow (wednesday) at noon eastern time, link in the following post: bsky.app/profile/astylianou.…
1
171
29 Sep 2024
Thank you for everything you did this year. The Program Chairs for the next couple of conferences are lucky to have you!
28 Sep 2024

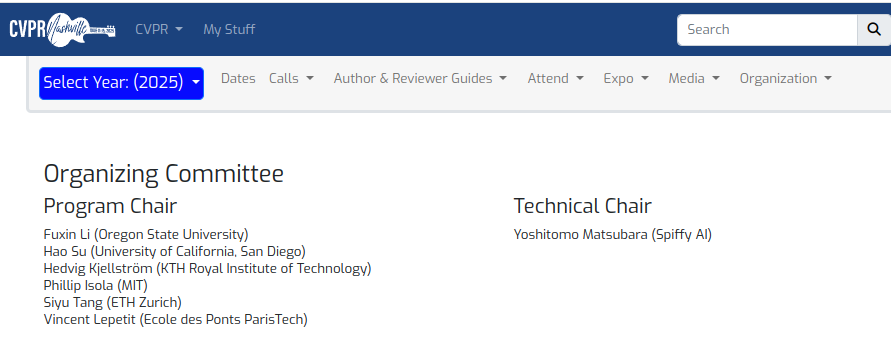
Having served as Technical Chair for CVPR 2024, I was appointed to serve as Technical Chair for
- CVPR 2025 - 2027
- ICCV 2025, 2027, and 2029
I am so excited to work for @CVPR & @ICCVConference and keep improving the review systems! 🔥🔥
1
9
994
Robert Pless retweeted

17 Jun 2024
The @CVPR AI Art Gallery is now live 🤖🎨
Featuring 115 artworks using or about computer vision😎
View them here: thecvf-art.com
#AIart #CVPR2024
3
30
97
48,033
13 Jun 2024
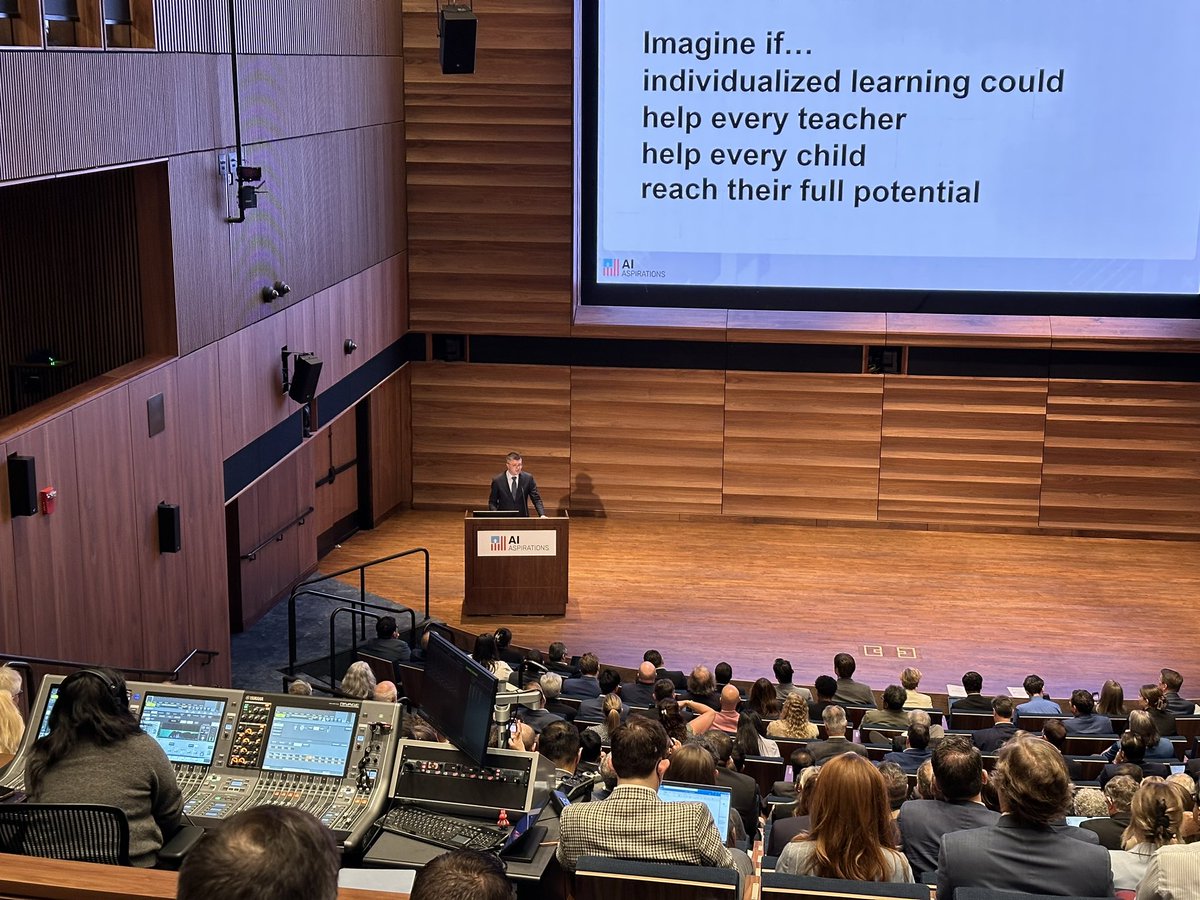
At the AI Aspirations event in the old Newseum building. I love being in DC @GWtweets and finding ways to understand what AI research is most important.
3
298
Robert Pless retweeted

29 May 2024
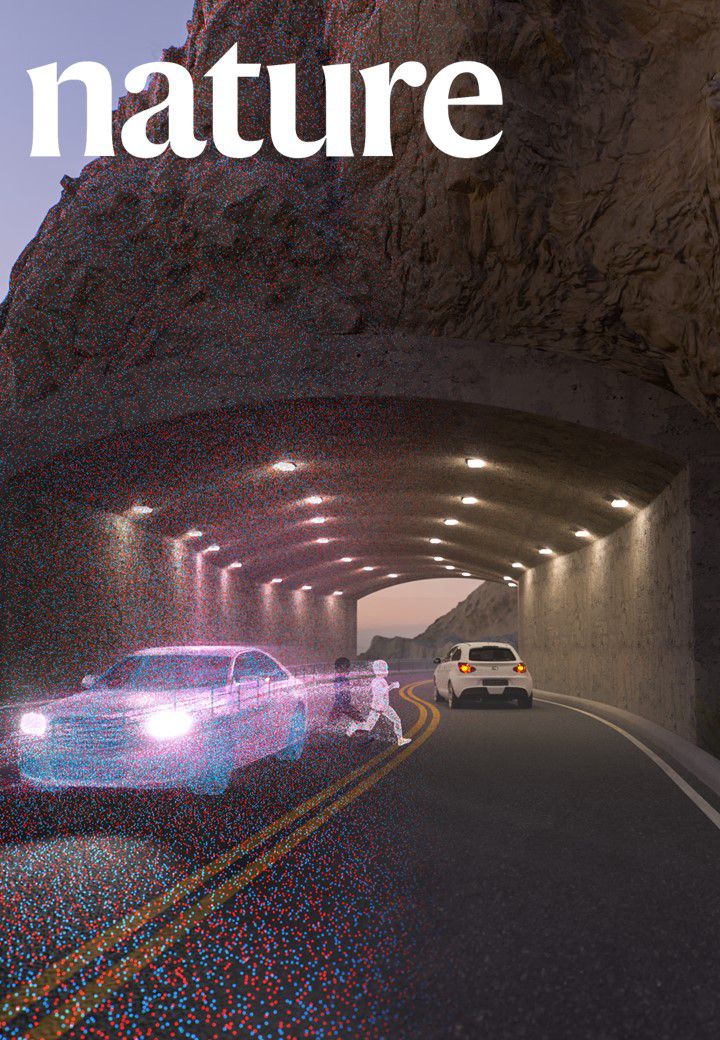
We are thrilled to share our groundbreaking paper published today in @Nature: "Low Latency Automotive Vision with Event Cameras."
Paper: nature.com/articles/s41586-0…
Video: youtu.be/dwzGhMQCc4Y
Code & Dataset: github.com/uzh-rpg/dagr
Frame-based sensors such as the RGB cameras used in the automotive industry face a bandwidth–latency trade-off: higher frame rates reduce perceptual latency but increase bandwidth demands, whereas lower frame rates save bandwidth at the cost of missing vital scene dynamics due to increased perceptual latency (see Fig. 1a of the paper). Event cameras have emerged as alternative vision sensors to address this trade-off. Event cameras measure the changes in intensity asynchronously, offering high temporal resolution and sparsity, markedly reducing bandwidth and latency requirements. Despite these advantages, event-camera-based algorithms are either highly efficient but lag behind image-based ones in accuracy or sacrifice the sparsity and efficiency of events to achieve comparable results. To overcome this, we propose a hybrid event- and frame-based object detector based on Deep Asynchronous GNNs, which preserves the advantages of each modality and thus does not suffer from this trade-off. Our method exploits the high temporal resolution and sparsity of events and the rich but low temporal resolution information in standard images to generate efficient, high-rate object detections, reducing perceptual and computational latency. In doing so, it emulates the slow-fast pathways in biological neural networks and uses them to its advantage. We show that using a 20-Hz RGB camera plus an event camera achieves the same latency as a 5,000-Hz camera with the bandwidth of a 50-Hz camera, i.e., an over 100-fold bandwidth reduction, without compromising accuracy. Our approach paves the way for efficient and robust perception in edge-case scenarios by uncovering the potential of event cameras. We release the code and the dataset (DSEC-Detection) to the public.
Kudos to @DanielGehrig6, who, with this work, also received the UZH Annual Award for the Best PhD thesis!
**Reference**
Daniel Gehrig, Davide Scaramuzza
Low Latency Automotive Vision with Event Cameras
Nature, May 29, 2024.
DOI: 10.1038/s41586-024-07409-w
PDF (Open Access): nature.com/articles/s41586-0…
Video (Narrated): youtu.be/dwzGhMQCc4Y
Code & Datasets: github.com/uzh-rpg/dagr
@UZH_en @UZH_Science @UZHspacehub @ERC_Research @nccrrobotics
13
71
466
35,218


Robert Pless retweeted

24 Apr 2024
The GIF compression kind of eats it up in the full crop, but there was a brief green flash captured just above the Moon's limb
2
4
32
5,161