
building robots - one at a time. incoming assistant prof @nyuniversity
Joined September 2014
- Tweets 92
- Following 296
- Followers 204
- Likes 691
5 Photos and videos


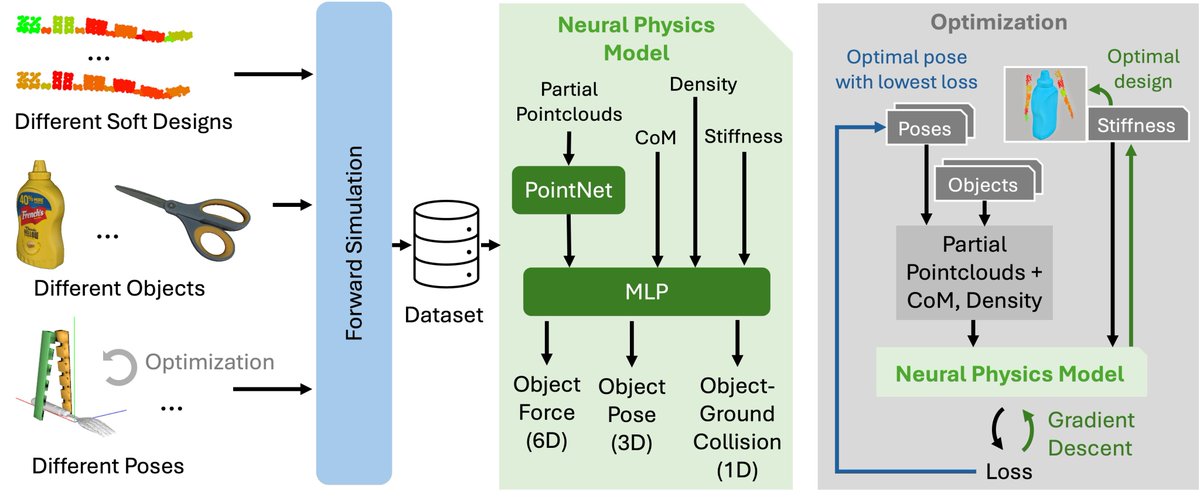


For years, I’ve been tuning parameters for robot designs and controllers on specific tasks. Now we can automate this on dataset-scale.
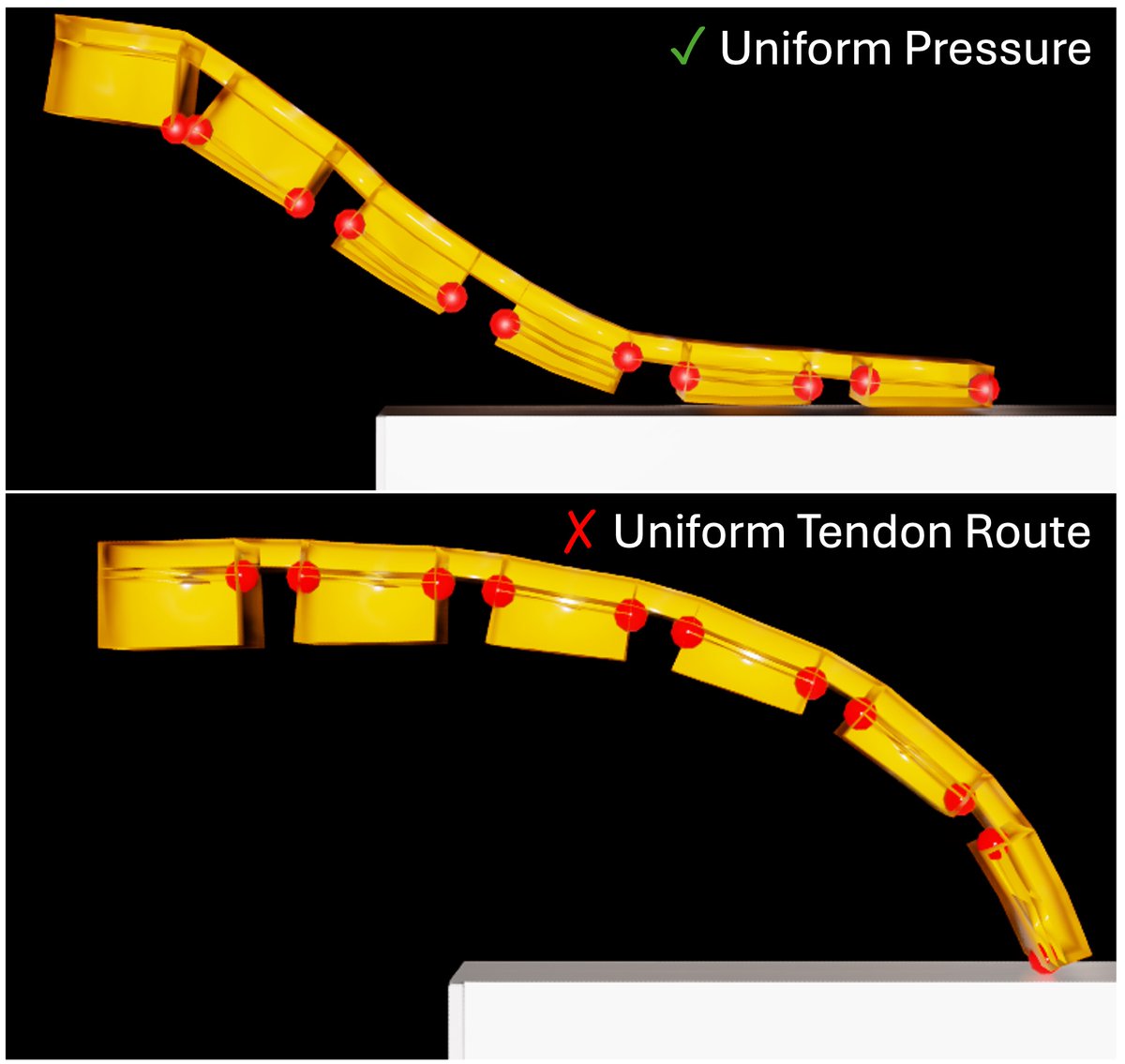
Introducing Co-Design of Soft Gripper with Neural Physics - a soft gripper trained in simulation to deform while handling load.
7
38
126
34,798
yisha retweeted

Jun 3
Human demos contain rich hand-object skills. The challenge is the embodiment gap. Human and robot hands differ in shape, joints, and contacts.
Introducing ConTrack, our latest work that turns contact-rich human hand-object demos into robot motions.
6
33
306
23,126
My first time going to CVPR! Looking forward to sharing our work and meeting everyone 🦉
Jun 2

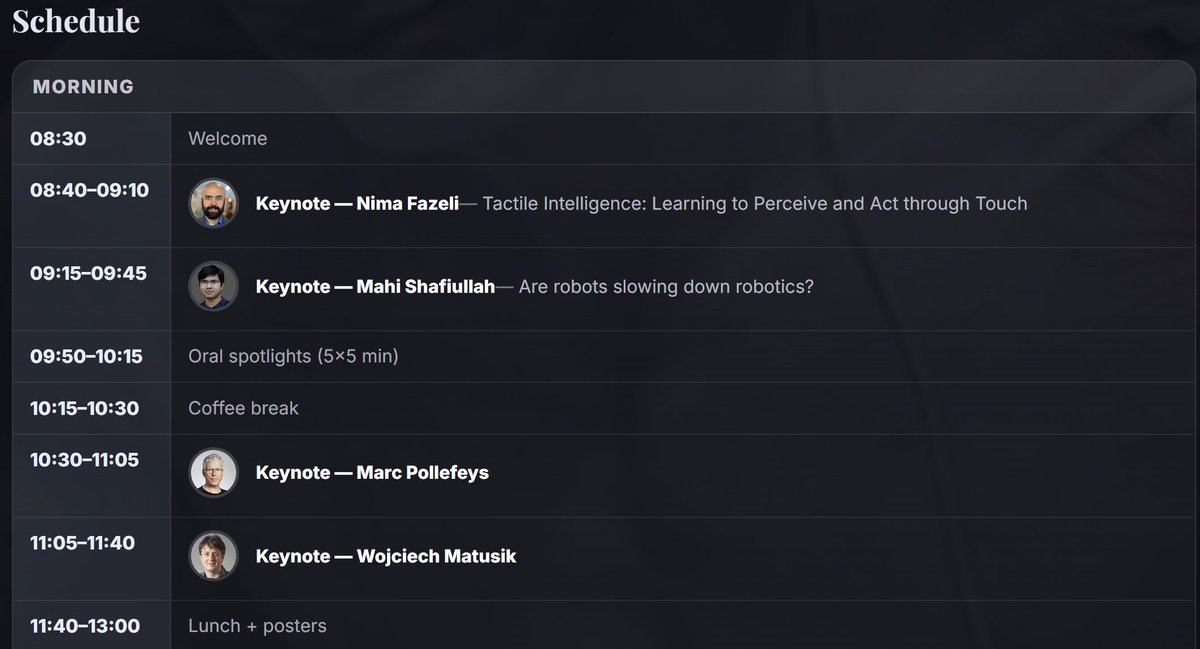
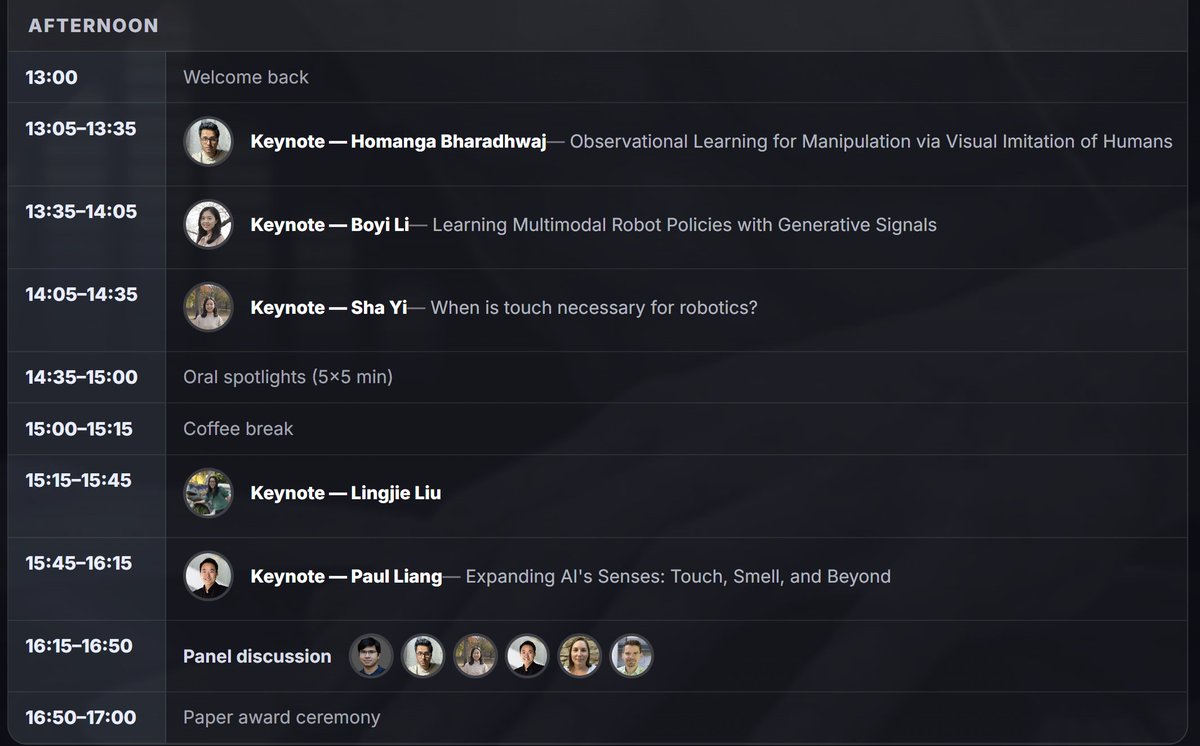
What senses does embodied AI need beyond vision?
Join us at Sense of Space Workshop @CVPR — a full-day workshop on multi-sensory modeling for embodied intelligence.
📅 June 3rd
📍 Mile High 2C, Denver
🖼 Posters: Hall A #275–282
Featuring invited talks from leading researchers across robotics, vision, sensing, and embodied AI. @NimaFazeli7 @notmahi @mapo1 @wojmatusik Christian Theobalt @mangahomanga @Boyiliee @yswhynot @LingjieLiu1 @pliang279 @Ismini_L
Website: sense-of-space.github.io/
#CVPR2026 #EmbodiedAI #Robotics #MultimodalAI #TactileSensing #SpatialIntelligence
Powered by the amazing team!
@RaoFu79761158 @LiGuankfd2 @alex_kai2020
Kun He @tomhodan Ergys Ristani Jessica Yin @AntheaYLi @yining_hong Devin Murphy Ray Song
@xyz2maureen @ericyi0124 Qi Ye @YunzhuLiYZ
@haoshu_fang @ruoshi_liu Vatsal Mehta @LuoYiyue
@MengyuLearner

5
846
I’ll be at CVPR for one day tomorrow presenting some of our tactile projects in the Sense of Space workshop! Happy to catch up with old and new friends 🙌
Feb 4

Can we bridge the Sim-to-Real gap in complex manipulation without explicit system ID? 🤖
Presenting Contact-Aware Neural Dynamics — a diffusion-based framework that grounds simulation with real-world touch.
Implicit Alignment: No tedious parameter tuning.
Tactile-Driven: Captures non-smooth contact events.
Consistent: Stable predictions in contact-rich tasks.
2
2
33
6,629
yisha retweeted

May 29
Excited to share FreeForm☁️: Reduced-Order Deformable Simulation from Particle-Based Skinning Eigenmodes at #CVPR2026
FreeForm enables fast elastodynamic simulation for robotics and beyond, directly on messy data (no mesh needed)!

1
14
69
10,487
yisha retweeted

Apr 24
VLA/VAs are doing well on short skills like pick-and-place. But real tasks rarely stop after one action, they require 1) many interdependent steps, 2) progress tracking, and 3) recovery from mistakes.
In our paper LoHo-Manip, we address long-horizon manipulation with trace-conditioned VLA planning: a task manager tracks what’s done, plans what remains, and guides execution with visual traces.
1
45
237
25,861
yisha retweeted

Apr 20
𝘏𝘰𝘶𝘴𝘦 𝘰𝘧 𝘋𝘦𝘹𝘵𝘳𝘢 - a generative robot hand and learned control co-design framework is out now!
Code and modular robot hand build guide are on our website.
We built four generated robot hands with learned control sim-to-real. End to end design and control < 24 hours
2
4
41
2,283
yisha retweeted
Apr 20
I am attending ICLR 2026 in Brazil tomorrow! DM if you want to meetup.
📅ICLR Poster presentation in Rio at Pavilion 4 on Sat, Apr 25, 3:15–5:45 PM. Hope to see you there!
🤖Project Website w/ Github: an-axolotl.github.io/Houseof…
🦾Build Guide: an-axolotl.github.io/Houseof…

1
7
353
yisha retweeted

Ever want to have a single policy to control diverse robots as well as different dexterous hands, or to observe the emergent behavior under cross embodiment training?
Introducing our #CVPR2026 paper XL-VLA, Cross-Hand Latent Representation for Vision-Language-Action Models.
11
44
271
87,581
Why is one robot headless 😨
Feb 5

"Cross-embodiment" is a sign of generalization. We’ve seen huge progress in manipulation and navigation — but what about humanoid whole-body control? Can ONE policy control multiple different humanoids?
Meet our #ICRA2026 work 🦅EAGLE: Embodiment-Aware Generalist Specialist Distillation for Unified Humanoid Whole-Body Control.
Instead of brute-force URDF / morphology domain randomization, we iteratively distill specialists into one generalist. We also find that embodiment-aware representations matter for policy learning.
🔗 website: eagle-wbc.github.io/
📜 arXiv: arxiv.org/abs/2602.02960
1
3
339
yisha retweeted

Feb 5
Learning world models from touch instead of pixels. Led by @cwj99770123 and @yswhynot
Feb 4
Can we bridge the Sim-to-Real gap in complex manipulation without explicit system ID? 🤖
Presenting Contact-Aware Neural Dynamics — a diffusion-based framework that grounds simulation with real-world touch.
Implicit Alignment: No tedious parameter tuning.
Tactile-Driven: Captures non-smooth contact events.
Consistent: Stable predictions in contact-rich tasks.
1
7
72
11,965
yisha retweeted

Feb 4
For years, researchers have believed that simulation could help scale up data, but physics remains the main bottleneck for sim-to-real deployment. Aligning simulation with real-world physics using visual 👁️ and contact 🤝 observations through a network could be a promising step. Check out our recent paper to learn more!
Feb 4
Can we bridge the Sim-to-Real gap in complex manipulation without explicit system ID? 🤖
Presenting Contact-Aware Neural Dynamics — a diffusion-based framework that grounds simulation with real-world touch.
Implicit Alignment: No tedious parameter tuning.
Tactile-Driven: Captures non-smooth contact events.
Consistent: Stable predictions in contact-rich tasks.
3
52
4,859
yisha retweeted

Feb 4
Can we bridge the Sim-to-Real gap in complex manipulation without explicit system ID? 🤖
Presenting Contact-Aware Neural Dynamics — a diffusion-based framework that grounds simulation with real-world touch.
Implicit Alignment: No tedious parameter tuning.
Tactile-Driven: Captures non-smooth contact events.
Consistent: Stable predictions in contact-rich tasks.
6
50
313
49,538
We align sim-real with contacts!
Feb 4
Can we bridge the Sim-to-Real gap in complex manipulation without explicit system ID? 🤖
Presenting Contact-Aware Neural Dynamics — a diffusion-based framework that grounds simulation with real-world touch.
Implicit Alignment: No tedious parameter tuning.
Tactile-Driven: Captures non-smooth contact events.
Consistent: Stable predictions in contact-rich tasks.
1
5
282
yisha retweeted
Feb 1
Pleased to announce our work - Cross Embodied Co-Design for Dexterous Hands - was accepted for ICLR 2026!
Our work fully generates novel robot hands and complementary control policies, zero-shot sim-to-real.
See you in Rio! #ICLR2026

2
5
19
1,411
Struggling with in-hand manipulation? Maybe because human-like hands are not the best hands 😉
We show that with co-design we can discover better hand morphologies for your tasks 🌟
31 Dec 2025

What makes robot hands dexterous? 🤖🖐️
We generate robot hands control, sim-to-real, in under 24 hours.
Paper: Cross-Embodied Co-Design for Dexterous Hands
🔥 Rapid evaluation w/ cross-embodied policies
🦾 Open-source modular hand platform
💡 Automated full-hand generation
1
201
yisha retweeted

2 Dec 2025
I am at #NeurIPS! I will be around theAgentCompany poster on Wednesday and giving a talk on towards creating future-proof CUA benchmarks at the SEA workshop on Sunday.
Happy to chat about multi-agent, environments, human-ai collaboration, PhD recruitment and more! DM or shuyanzhxxx@gmail.com 🏖️
3
9
103
6,565
Xueyan is amazing! Catch her at Neurips before it’s too late🥹
1 Dec 2025

I will join Tsinghua University, College of AI, as an Assistant Professor in the coming month. I am actively looking for 2026 spring interns and future PhDs (ping me if you are in #NeurIPS).
It has been an incredible journey of 10 years since I attended an activity organized by Tsinghua University and decided to change my undergraduate major from Economics to Computer Science, inspired by one of the teammates. During the 10 years, I met with appreciation of many wonderful researchers/professors who led me to continued growth. 🐿️
My research focus will continue to be AI & Robotics, with a specific emphasis on Interactive Embodied Intelligence. You can check my homepage to learn more: maureenzou.github.io/lab.htm….
I am currently local to San Diego and will be attending #NeurIPS. Please ping me over WeChat or Email if any old or new friends are interested in having a coffee chat! (Really looking forward to meeting as many friends as possible at #NeurIPS)
[The photo is one of the places that I will miss a lot in the US]

1
2
511
yisha retweeted
17 Nov 2025
How do we make dexterous hands handle both power and precision tasks with ease? 🫳👌🫰
We introduce Power to Precision (💪➡️🎯), our new paper that optimizes both control and fingertip geometry to unlock robust manipulation from power grasp to fine-grained manipulations.
With simplified finger motions and augmented fingertips, the hand can perform diverse motions from pinching a nut🔩 to handling a pan🍳. Check the demos below🎥.
13
77
394
109,687
yisha retweeted

14 Nov 2025
Excited to share that I’ve recently joined the Chinese University of Hong Kong (CUHK) as an Assistant Professor in Mechanical and Automation Engineering! My research will continue to focus on embodied AI & humanoid robotics — legged locomotion, whole-body and dexterous manipulation, robot foundation models, and more.
Hong Kong offers a unique environment: next to mainland China’s rapidly growing robotics ecosystem, while also being an international and globally connected city. A great place to build impactful robotics research.
🎓Multiple PhD openings (legged, manipulation, aerial, dex hand, and more)
🗓️Deadline: Dec 1, HKT (mae.cuhk.edu.hk/research-pos…)
🌍International applicants are encouraged to also apply for HKPFS (cerg1.ugc.edu.hk/hkpfs/index…)
10
16
116
17,954