
GOOD NEWS EVERYONE! Educator•Scientist•Artist•Thinker•Nerd *A Trusted Friend in Science*
Joined November 2012
- Tweets 92,227
- Following 5,739
- Followers 1,706
- Likes 137,584
7,190 Photos and videos













Build Something Awesome: The WPI XRP Medal Challenge Is Here👇
digikey.com/en/maker/blogs/2…
#Raspberrypi #Sparkfun #3DprintingNerd #XRP

1
5
13
577
Gotham_Knowledge retweeted

In 2023, researchers in a deep-sea submersible west of Australia came across several whale skeletons 2400 meters deeper than had ever been described.
As the expedition continued, the scientists found an unprecedented abundance of skeletons—the biggest, deepest, and oldest collection ever seen on the sea floor.
Learn more: scim.ag/3QIckIz @NewsfromScience
9
52
409
64,316

RFKjr is one of the most dangerous persons in the US government. He will weaponize the merger of this Dept of Ed data with his own perversions of vaccine denialism and quack science to ruin both education, medicine, public trust. Mark My Words.
5
Gotham_Knowledge retweeted

#Ocean
"Supreme stupidity" is no exaggeration:
Destroying the Ocean Observatories Initiative would be a momentous act of harm to US interests.
Senators are now fighting back, and have written to the NSF to reverse course on its plan.
In their letter, the senators cited the approaching El Niño – a periodic Pacific warming that disrupts weather patterns and supercharges marine heat waves – as evidence the cuts are particularly ill-timed.
“The loss of this deep-water observation system would threaten our ability to prepare for and monitor future El Niño events,” they wrote, warning coastal communities, fishermen and emergency responders would be left without crucial information.
“In a time of strained resources, the NSF is wasting time and money to destroy its own scientific infrastructure.”
My team of marine scientists use data from the OOI regularly and it is complete nonsense to suggest that there is any other system in place which can match its capabilities.

15
297
442
4,083
More deeply , inconceivable levels of corruption

Breaking News: The Justice Dept. is seeking to throw out a lawsuit against Elon Musk’s company, xAI, over the data center's air pollution, saying it has the right to run polluting gas-burning turbines in Mississippi despite not having permits for them. nyti.ms/4vf29dw
34

Explore JPL is returning October 10-11, 2026!
This free, immersive event invites the public for a rare behind-the-scenes look at the groundbreaking science and engineering driving NASA’s missions across our solar system and beyond.
Tickets are free, but limited. Registration opens August 29. jpl.nasa.gov/explore-jpl/

ALT A color photograph shows a group of visitors looking into the high bay clean room at JPL, where spacecraft are built. A large logo in the center of the image reads in bold text, “Explore JPL 2026”.
6
48
166
15,567
Gotham_Knowledge retweeted

Breaking News: The Trump administration took its most aggressive steps to dismantle the Education Department by breaking away key programs for disabled students and the enforcement of civil rights laws in schools. nyti.ms/4uQ7TK0
134
748
1,170
152,995
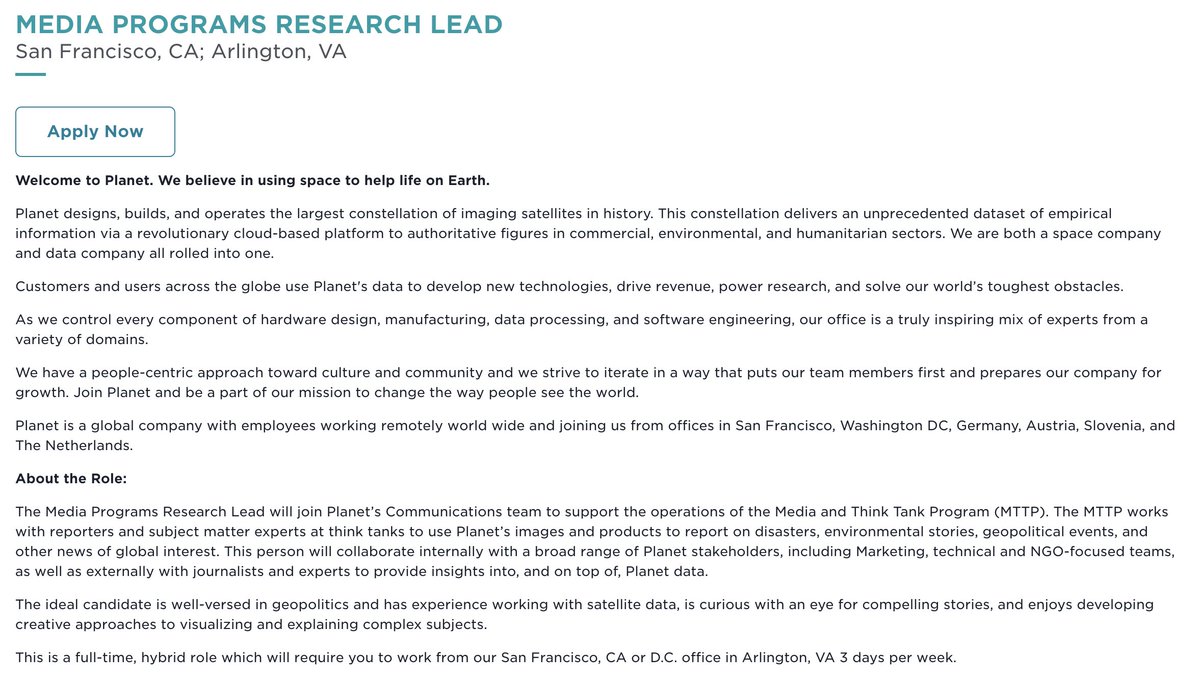
Gotham_Knowledge retweeted

All of you satellite imagery nerds out there, @planet's media program is looking for a full-time research lead to join them. Really cool chance to work with a nice team and get some hands on amazing imagery! 🛰️
planet.com/company/careers/?…
8
30
2,016
Why do I have to pay taxes for losing a war? A vanity ballroom boondoggle? A pond scum reflecting pool of corruption? Pardons to actual criminals, robbing the NPS, and depriving this nation of science, and medicine?
21
Gotham_Knowledge retweeted

Robotics basics straight from Stanford! 😮💨
This free from @Stanford University is a great starting point to kinematics, dynamics, control, motion planning, trajectory generation, and design.
There is no better way to get into robotics than through a legend like Oussama Khatib from Stanford Robotics Center.
Oussama Khatib is one of robotics' founding legends. He was reseaching human-centered robotics when the field was still obsessed with industrial cages and safety barriers.
His work on haptic feedback and dynamic control made robots safe to work alongside humans.
16 lectures grounded in the actual mathematics robots need to move safely and work with people.
That's what you can find inside:
→ Spatial transformations
→ Forward & inverse kinematics
→ Jacobians, velocity propagation, and singularities
→ Trajectory generation
→ Motion planning
→ Newton-Euler and Lagrangian methods
→ Manipulation, and compliance,
→ Applications in vision-based robotics and whole-body control
Access it here for free and recommend to your robotics buddy: see.stanford.edu/Course/CS22…
~~
♻️ Join the weekly robotics newsletter, and never miss any news → ziegler.substack.com

1
53
410
15,508
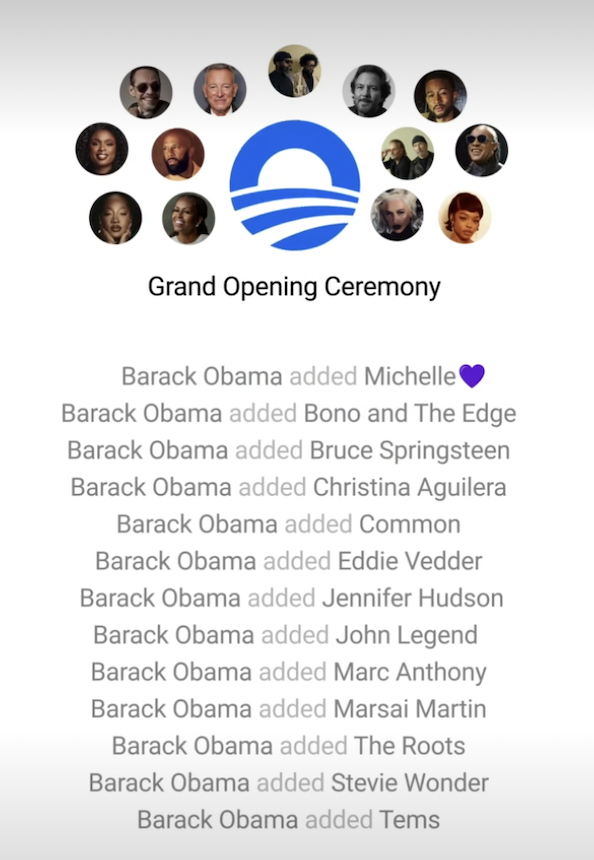
Now this is an America 250 concert

The performers for the Obama Presidential Library opening on June 18 have been announced:
Stevie Wonder
John Legend
Jennifer Hudson
The Roots
Bruce Springsteen
Christina Aguilera
Marsai Martin
Common
U2’s Bono and The Edge
Eddie Vedder
Marc Anthony
Tems
1
44
Gotham_Knowledge retweeted

BREAKING: The Trump administration is moving Education Department oversight of special education and civil rights to other agencies. apnews.com/article/trump-civ…
123
684
1,071
286,152
Once PE sinks it's claws into something, it's done for

Yum! Brands says it is selling Pizza Hut in a $2.7 billion deal that will split ownership of the restaurant chain between a U.S. private equity firm and a Chinese restaurant company.
cbsn.ws/4elC1GI
1
32
*screaming*

Bombshell report from the post. Taxpayers funding half of the WH ballroom construction. washingtonpost.com/investiga…
21
Everything they make is beautiful
19h

Available now! With first-class cooling performance, superb quietness of operation and industry-leading reliability, our new NL-LC1 series brings classic Noctua virtues to the world of all-in-one liquid cooling: noctua.at/en/news/noctua-int…

26
Gotham_Knowledge retweeted

Fiscal responsibility
47
1,885
15,352
220,726
His mind is shot

TRUMP: PSYCHOLOGICALLY, WE WANT TO GET IRAN’S ENRICHED URANIUM
16
Gotham_Knowledge retweeted

Jun 15
Fox is buying Roku.
Ellison bought CBS and CNN.
Bezos owns WaPo.
ABC and NBC owners support Trump.
We need to grow independent, pro-democracy media. Support Democracy Docket now. bit.ly/4a7l1TR
992
3,225
9,732
189,540
Everything is corrupted
Jun 15

BREAKING WSJ:
The Trump Justice Department's senior leadership closed an investigation of Paramount's bid for Warner Bros. Discovery before career staffers who were concerned about the acquisition had an opportunity to object, according to people familiar with the matter.
wsj.com/business/media/justi…
76
Gotham_Knowledge retweeted

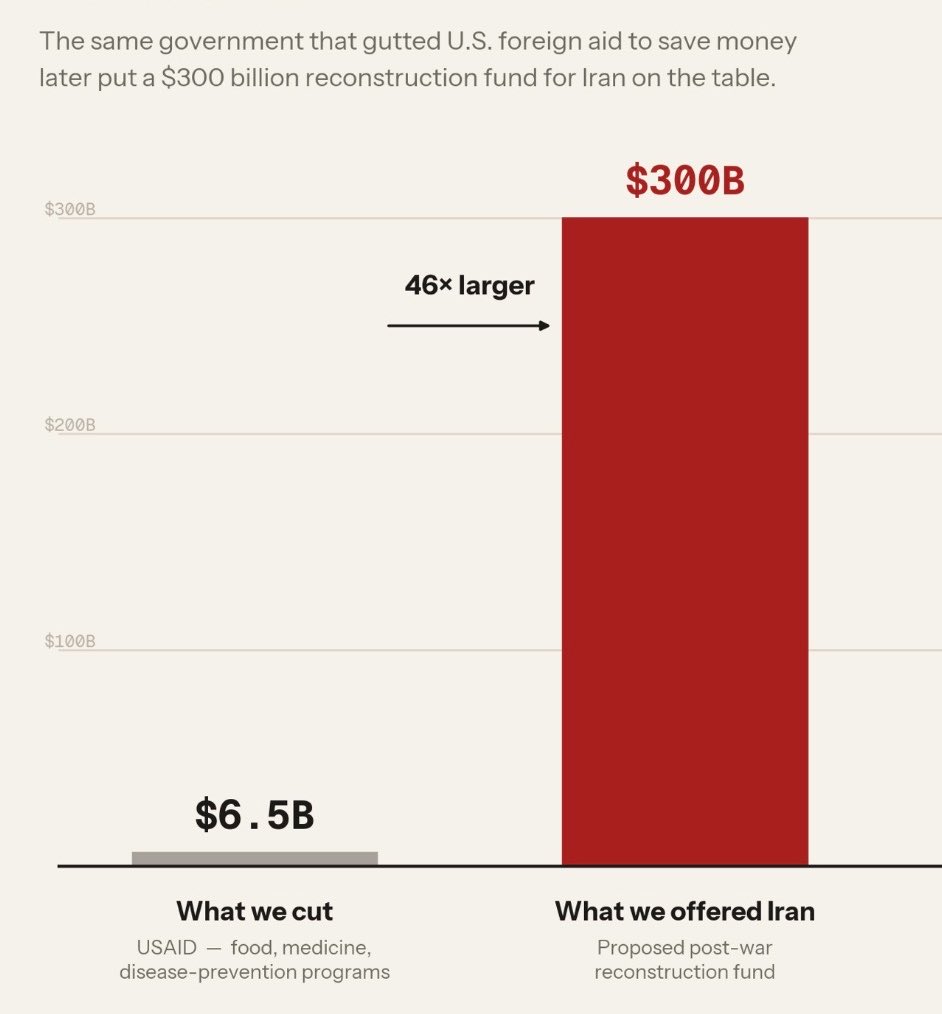
Jun 15
So, Trump is gonna give Iran $300 billion to open a strait that wasn’t closed, so long as they promise not build a nuke they didn’t have?
Do I have that just about right?
2,842
5,658
30,875
541,309