
Investor, wissenschafts- und innovationsfreundlich, bilde mir gerne eine eigene Meinung, mobil mit Tesla LT1 Stingray!
Joined December 2023
- Tweets 7,754
- Following 188
- Followers 312
- Likes 42,825
179 Photos and videos







…und die meisten Zulassungsbehörden in der EU schlafen weiter.
Das ist grob fahrlässig und gefährdet Menschenleben!
Jun 9

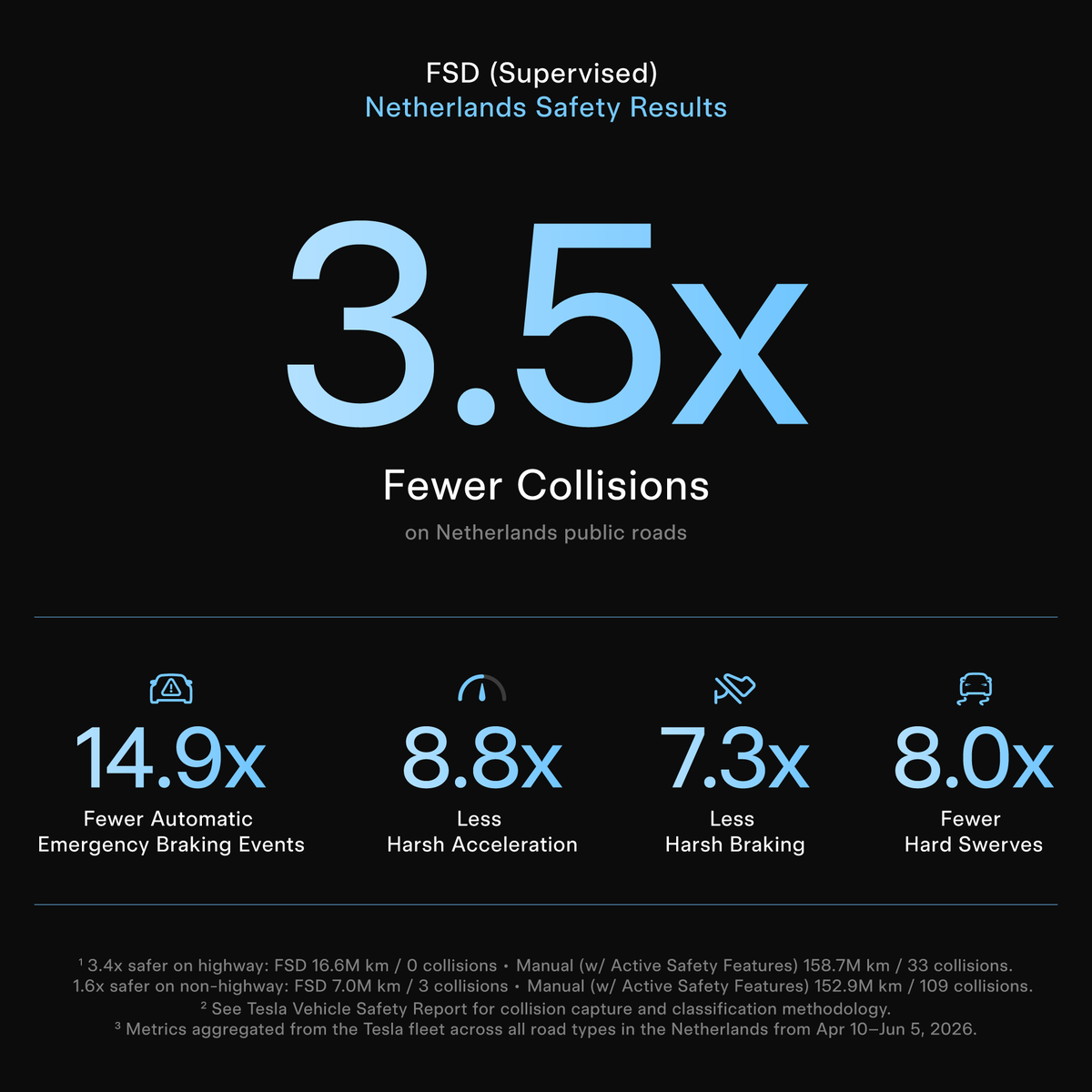
Tesla has released its first-ever FSD (Supervised) safety data from its Netherlands fleet.
• 3.5x fewer collisions
• 3.4x safer on highway: FSD 16.6M km/0 collisions
• 14.9x fewer automatic emergency braking events
• 8.8x less harsh acceleration
• 7.3x less harsh braking
• 8x fewer hard swerves
Tesla "Metrics aggregated from the Tesla fleet across all road types in the Netherlands from Apr 10-Jun 5, 2026."
2
14
208
Hahaha, wieder so ein Rohrkrepierer, der als Tesla Killer angekündigt wurde.
May 27

Gerade erst ausgeliefert - schon geht'smit dem neuen BMW iX3 Neue Klasse zurück in die Werkstatt wegen Stromschlaggefahr während dem Ladevorgang. An der Karosserie könnte Strom Anliegen. Und das bei BMW.
Viele regen sich auf, wenn bei Tesla über die Software ein "Rückruf" durchgeführt. Also per OTA Update ein Mangel behoben wird. Keine Werkstatt, keine Kosten. Das nenne ich PREMIUM.
Bei BMW muss man mit seinem Neuwagen gleich wieder in die Werkstatt. Und bereits produzierte Autos dürfen nicht ausgeliefert werden. Erst muss das neue Auto repariert werden.
Ganz ehlich: ich fahre lieber Tesla. Nach 20 Jahren BMW kenne ich KEINEN Grund, wieder einen BMW zu kaufen.
1
73
True!
Apr 24

While Legacy Auto is finding new ways to reinvent the steering wheel, Tesla is removing them.
Autonomy is here.

3
169


Das wird dann das weiterentwickelte Cockpit im VW ID 3 neo Facelift ab 2030. 😂


1
12
606
Das wird dann das weiterentwickelte Cockpit im VW ID 3 neo Facelift ab 2030. 😂
Apr 18

What if the passenger needs a specific function on a button. There is still room above the glove box.
I cannot believe they let this opportunity slide.
3
123
Dem ist absolut nichts hinzuzufügen!
Apr 10

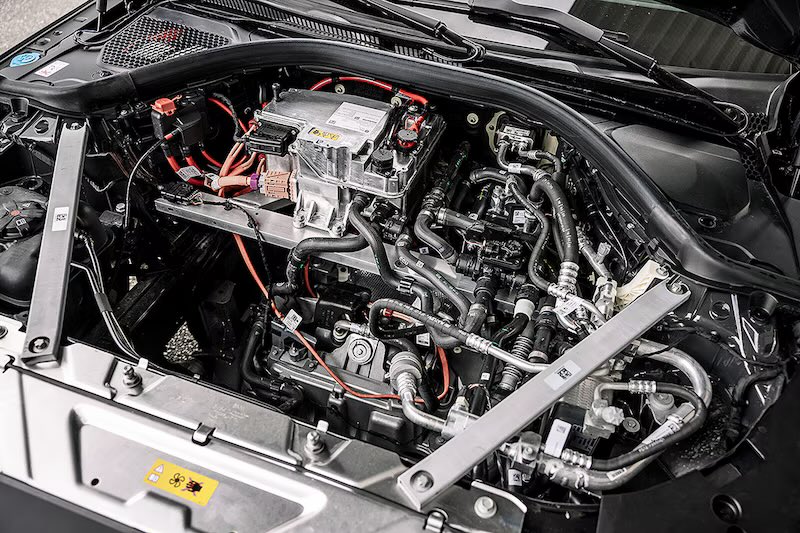
Es ähnelt einem Volkswagen, 1.5 TSI oder so.
2
103
Was sind das nur für Ingenieure bei BMW, haben die keine Ordnung im Kopf?
Apr 11
2024 Tesla Model 3 vs 2024 BMW I4
Tesla Engineering is something else.

2
1
13
1,058

So was würde bei Volkswagen NIEMALS passieren!
Mar 31

$RKLB: Rocket Lab CEO Sir Peter Beck Slashes Salary to $1 and cancels 392,155 Unvested restricted stock units (RSUs).
In an 8-K filed March 30, Rocket Lab CEO Peter Beck cut his annual salary to $1, waived all bonus rights, and cancelled 392,155 unvested RSUs, redirecting freed capital directly toward strategic R&D.
The move signals deep conviction in RKLB's long-term roadmap at an inflection point with Neutron development, hypersonic programs, and the brand new Mynaric laser comms integration.

4
104
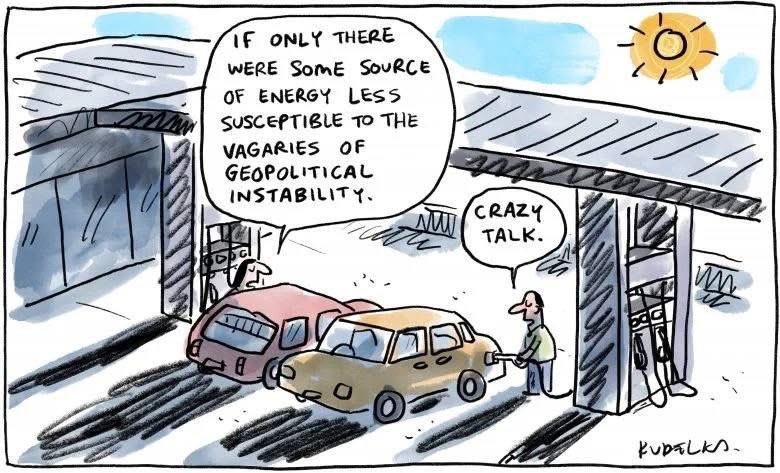
Dyskalkulie ist, wenn man wg. der laufendes Kosten seines Benziners das Rechnen anfängt und auf einen archaisch-ineffizienten, alten Mercedes Diesel Stinker als Lösung kommt! 🤡
Psssst! Spoiler:
Die richtige Lösung lautet effizientes u. günstiges BEV, z.B. Tesla M3 Standard. 😀
Mar 30

Ehrliche Rechnung:
Mein Audi RS6 kostet mich durch die 1%-Regelung 1.256 € brutto monatlich – über 15.000 € im Jahr.
Hinzu kommen noch ca. 20.000 € laufende Kosten.Deshalb habe ich mir extra einen alten Mercedes E220 Diesel gekauft und melde den RS6 jetzt ab.
Manchmal ist weniger einfach mehr. Man muss halt Prioritäten setzen.
Wie seht ihr das?


3
142


Holger Segerer retweeted

Mar 15
The Self-Driving Car Problem isn’t a Sensor Problem, it's a Brain Problem.

174
286
3,059
427,361
Autonomes Fahren mit Lidar/Radar gegenüber FSD:
„Multi-sensor approaches deliver quick early wins by patching vision weaknesses, … they mask the need for true mastery of computer vision …. Companies end up over-investing … instead of solving the hard problem.“

1
1
5
176
Jensen Huang erkennt die Marktführerschaft von Tesla FSD
NVIDIA CEO Jensen Huang on Tesla FSD at CES:
“Tesla’s FSD stack is completely world-class. They’ve been working on it for quite some time. It’s world-class. Not only in the number of miles it has, but it’s world-class in the way that it’s designed, the way they do training to data collection and curation, synthetic data generation, all of their simulation technologies.
Of course, the latest generation is end-to-end full self-driving, meaning it’s just one large model that is end-to-end trained. Elon’s AV system is, in every way, 100% state-of-the-art. And so I’m really quite impressed by the technology. I have it and I drive it in our house and it works incredibly well.”
1
5
215

28 Dec 2025
Tesla schafft ein autonomes Environment für autonome Taxis:
App für Bestellung und Abrechnung, autonomes Cybercab, kontaktloses Laden, Roboter Reinigung und jetzt auch noch automatische Erkennung des Verschmutzungsgrades und adaptive Festlegung der Reinigungsprozedur!
Episch!
28 Dec 2025

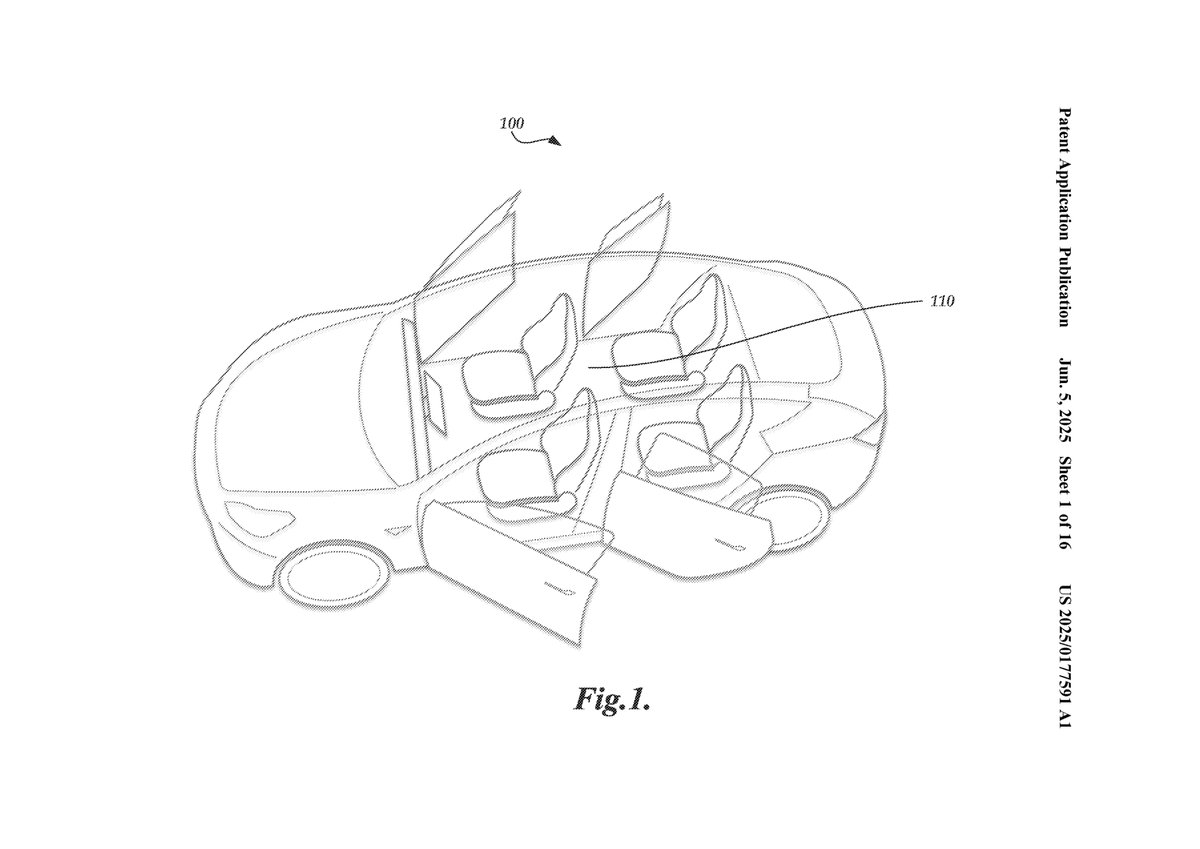
CONTROLLING ENVIRONMENTAL CONDITIONS IN ENCLOSED SPACES
@Tesla's US20250177591A1 presents an automated sanitation system for shared vehicle cabins that detects environmental conditions, generates adaptive cleaning routines, and executes multi-modal disinfection without human intervention. The patent addresses a fundamental challenge in autonomous mobility: maintaining hygiene standards when no driver or cleaning staff is present between passengers. As Tesla prepares to deploy its Cybercab robotaxi fleet, this technology becomes essential infrastructure for commercial operation.
The imminent launch of Tesla's Cybercab brings autonomous ride-sharing from concept to commercial reality. Industry analysts project millions of robotaxi trips daily within the next decade, making cabin hygiene a critical operational requirement. When vehicles operate continuously without human oversight, traditional sanitation methods become impractical. Manual cleaning requires time, labor, and physical access to each vehicle. The specification notes that "current means for sanitizing shared spaces, for example manually wiping touch surfaces using disinfectant wipes, can be time-consuming, laborious and lead to unsatisfactory sanitation conditions" ([0003]). Furthermore, manual approaches "may not be easily verifiable" ([0003]), leaving passengers uncertain about cleanliness. The COVID-19 pandemic intensified these concerns, demonstrating how shared spaces facilitate "indirect transmission of communicable diseases through contaminated air or surfaces" ([0003]). For a fleet of thousands of robotaxis operating around the clock, the gap between sanitation requirements and available solutions demands an entirely new approach.
Tesla's patent bridges this gap through a comprehensive system that monitors, decides, and acts autonomously. Multiple sensor types detect both environmental conditions and occupant presence. A processor generates sanitation routines tailored to detected conditions and time constraints. Various vehicle components then execute these routines through coordinated action, from HVAC systems to UV lighting to autonomous repositioning.
Key Breakthroughs:
◽Detecting environmental conditions and sensitive entity absence through multi-sensor fusion
◽Generating adaptive sanitation routines based on pathogen characteristics and schedule constraints
◽Coordinating HVAC, lighting, mechatronics, and autonomous driving for comprehensive disinfection
[FIG. 1: Vehicle 100 with enclosed space 110 where sanitation system operates]
[FIG. 11: Rideshare cycle 1100 showing sanitation integration between passenger trips from blocks 1102 through 1112]

3
142


Holger Segerer retweeted

22 Dec 2025
First cat in the world to ride a human-less Tesla Robotaxis ride
104
105
1,113
60,443
21 Dec 2025
Stimmt!
21 Dec 2025

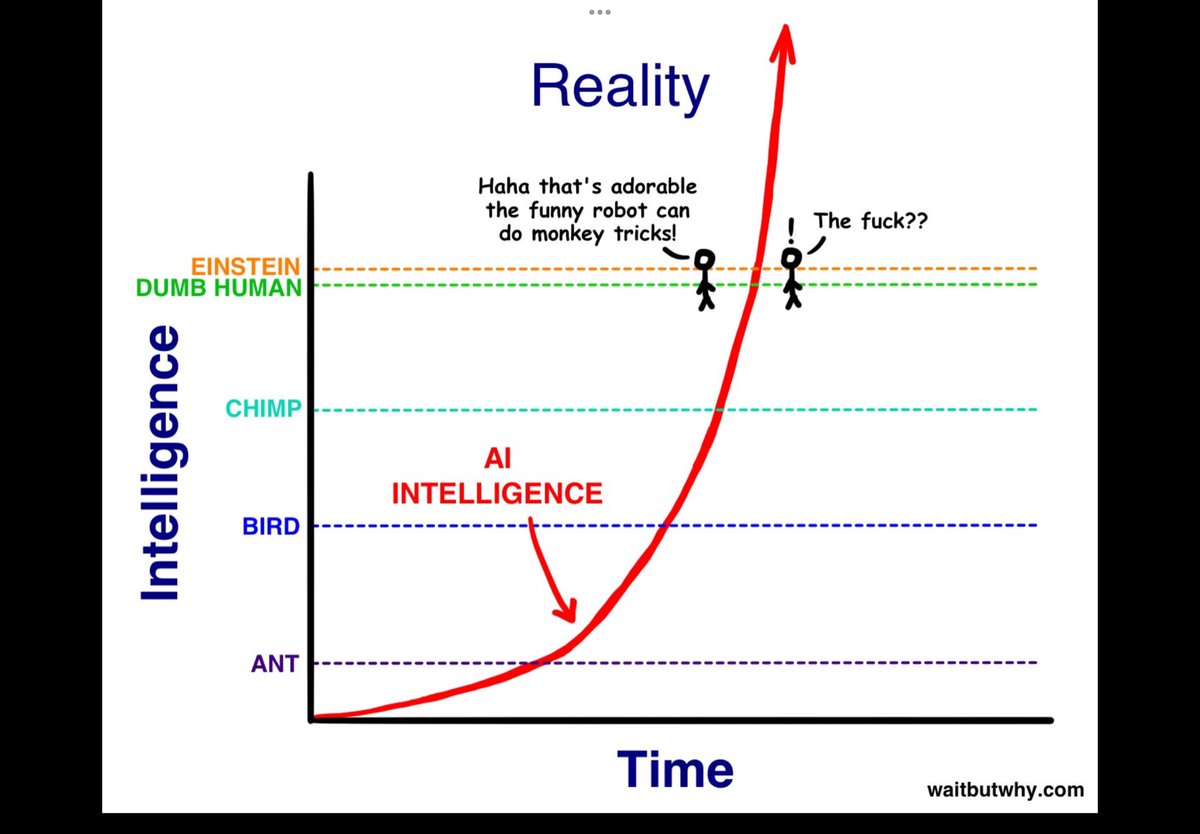
"Die Technologien entwickeln sich weiter, der Mensch aber nicht."
Harold James hat leider recht...
1
46
12 Dec 2025
💯🎯

3
201