
@jadp@mastodon.social for IoT Sensor Analytics Ecosystems (SensAE), Privacy, Ethics; DataArchon, Bayesian; BBBT; IoTPL; Clean & Green; Foodie
Joined June 2008
- Tweets 70,677
- Following 7,277
- Followers 6,699
- Likes 49,960
1,317 Photos and videos










Pinned Tweet

4 Dec 2021
My focus on #InternetOfThings started in 2000 when we added RFID and mobile barcode reader data to supply chain, logistics and asset management EDW/BI that we were creating for industry and government organizations #IoT #IIoT #IoTPL
1
7
27
Joseph A. di Paolantonio retweeted

23 Jun 2023
#USA consumes highest level of carbonated drinks!
(no doubt we consume more #sugar than needed)
@EvanKirstel @IrmaRaste @JAdP
23 Jun 2023

Consumption of carbonated soft drinks (litres per person per year):
🇺🇸 USA: 216
🇦🇷 Argentina: 155
🇨🇱 Chile: 141
🇲🇽 Mexico: 137
🇮🇪 Ireland: 126
🇨🇦 Canada: 119.8
🇳🇴 Norway: 119.8
🇺🇾 Uruguay: 113
🇧🇪 Belgium: 102.9
🇦🇺 Australia: 100.1
🇬🇧 UK: 96.5
🇳🇱 Netherlands: 96.1
🇸🇦 Saudi Arabia: 89
🇧🇴 Bolivia: 89
🇳🇿 New Zealand: 84.2
🇸🇪 Sweden: 82.4
🇨🇭 Switzerland: 81.4
🇩🇰 Denmark: 80
🇦🇹 Austria: 78.8
🇩🇪 Germany: 72
🇷🇺 Russia: 66.4
🇧🇷 Brazil: 59.5
🇫🇮 Finland: 52
🇮🇹 Italy: 50.2
🇪🇸 Spain: 39.2
🇫🇷 France: 37.2
🇮🇩 Indonesia: 23
🇯🇵 Japan: 21.6
🇮🇳 India: 4.2
2
3
338
Joseph A. di Paolantonio retweeted
20 Jun 2023
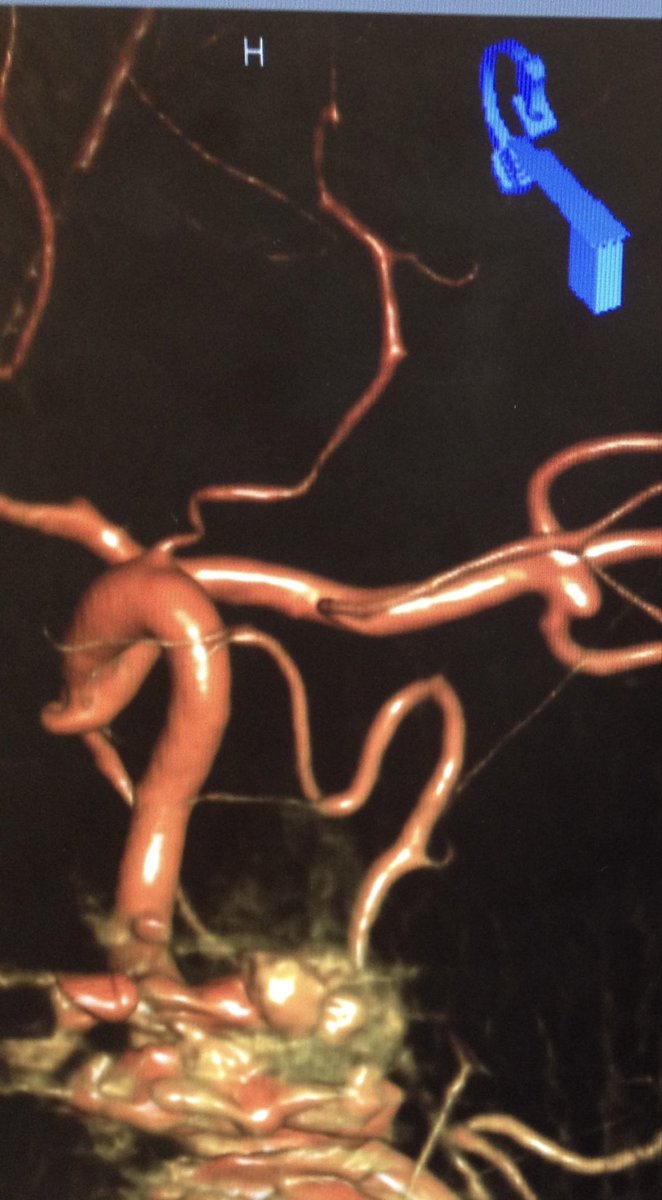
Apple Watch alerts 29-year-old Cincinnati woman to blood clot in lungs while sleeping - 9to5Mac 9to5mac.com/2023/06/19/apple… @IrmaRaste @JAdP
3
5
487
Joseph A. di Paolantonio retweeted

19 Jun 2023
China's ByteDance Has Gobbled Up $1 Billion of Nvidia GPUs for AI This Year tomshardware.com/news/chinas…
1
2
243
Joseph A. di Paolantonio retweeted
19 Jun 2023
The Evolution of Human Digital Twins: From Concept to Reality - CityLife - goo.gl/alerts/6rs8Ne #DigitalTwins @JAdP @IrmaRaste
1
1
3
234
Joseph A. di Paolantonio retweeted

17 Jun 2023
AlphaDev discovers faster sorting algorithms
New algorithms will transform the foundations of computing
deepmind.com/blog/alphadev-d…
#AI @mvollmer1 @anijov @CatherineAdenle @ahier
@gvalan @avrohomg @Shi4Tech @Damien_CABADI
@enilev @FmFrancois @BIScorecard @data_nerd @YvesMulkers
1
24
25
3,505
Joseph A. di Paolantonio retweeted
18 Jun 2023
16 Jun 2023

Impact Day showed that when our people come together and volunteer at more than 1,200 sites across the US, we have the power to make an #ImpactThatMatters. And together, we make an #ImpactEveryDay. deloi.tt/3MW59GT
2
2
1,360
Joseph A. di Paolantonio retweeted
13 Jun 2023
Very happy to share the Pleasanton, CA - #College Readiness workshop that I lead, for High/Middle Schoolers and their Parents.
[photo shows only @Deloitte volunteers and no minor/teenage participants] #K12
@RobTiffany @EvanKirstel @JAdP @davebart #ImpactThatMatters

13 Jun 2023
Every day, Deloitte’s people work to make an #ImpactThatMatters. Check out our Impact Day highlights from 1,200 volunteer sites across the US and see how we contribute to our communities year-round. deloi.tt/3CkhIHi
2
8
2,114
Joseph A. di Paolantonio retweeted

8 Jun 2023
Navigating the complexities of #ThirdPartyRiskManagement 🧭 is just the beginning. The next frontier is managing #FourthPartyRisk and even beyond. 🌐
Just like an intricate web, fourth parties are subcontractors to your direct vendors. 🕸️ They're a step…lnkd.in/dSXjwuey
1
1
265
Joseph A. di Paolantonio retweeted
4 Jun 2023
1
2
174
Joseph A. di Paolantonio retweeted
3 Jun 2023
How to make your home more green?
Starting point: Switch to LED light bulbs.
Use water judiciously
Consider #solar / #EV etc. @JAdP
#Sustainability

2
2
154
Joseph A. di Paolantonio retweeted

31 May 2023
Thrilled and honored to see my #digital #strategy company, "Digital Insights" named in the top "50 Thought Leading Companies on Cloud Computing" by Thinkers360. I was fortunate enough to participate in the building of the #Azure during my time at Microsoft which gave me deep insight into the workings of #cloudcomputing.
See all the other leading companies here:
thinkers360.com/50-thought-l…

6
22
23
1,788
Joseph A. di Paolantonio retweeted
29 May 2023
Jahangir Mohammed sold his IoT startup for US$1.4B. Now he wants us all to have a digital twin - goo.gl/alerts/9bf6gj #human #Digitaltwins @JAdP
1
4
124
Joseph A. di Paolantonio retweeted

29 May 2023
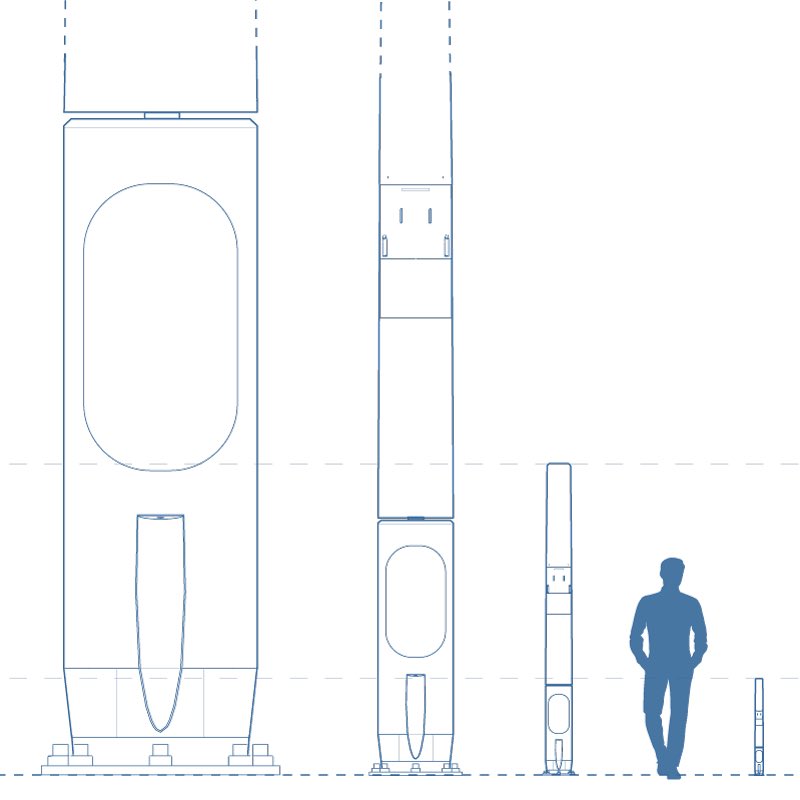
Wind energy has a massive waste problem. New technologies may be a step closer to solving it | CNN cnn.com/2023/05/28/world/win…
2
4
1,522
Joseph A. di Paolantonio retweeted
29 May 2023
As the first generation #Windturbines come to an end of life, new methods are being developed to dispose / recycle the turbine blades in an environment friendly ways. @RobTiffany @JAdP
29 May 2023

Wind energy has a massive waste problem. New technologies may be a step closer to solving it | CNN cnn.com/2023/05/28/world/win…
1
2
140
Joseph A. di Paolantonio retweeted
27 May 2023
Good to see smoking is on decline. Not sure it accounts for growth in caping which is a big teenage problem in the USA. @jadp @IrmaRaste
27 May 2023

Decline in % of adults who smoke (from 2000 to 2020):
🇳🇵 Nepal: -34.1%
🇸🇱 Sierra Leone: -30.2%
🇰🇮 Kiribati: -27.9%
🇳🇴 Norway: -27.8%
🇮🇳 India: -27.3%
🇦🇹 Austria: -25.9%
🇵🇪 Peru: -24.8%
🇨🇺 Cuba: -22.9%
🇧🇩 Bangladesh: -22.9%
🇲🇲 Myanmar: -22.8%
🇬🇧 UK: -22.5%
🇬🇷 Greece: -21.4%
.
🇸🇪 Sweden: -19.8%
🇩🇰 Denmark: -19.8%
🇵🇰 Pakistan: -17.3%
🇨🇦 Canada: -15.4%
🇩🇪 Germany: -14.4%
🇰🇷 South Korea: -14.2%
🇯🇵 Japan: -13.2%
🇳🇱 Netherlands: -12.1%
🇵🇭 Philippines: -12%
🇧🇷 Brazil: -11%
🇲🇽 Mexico: -10.9%
🇺🇸 United States: -10.8%
🇦🇺 Australia: -10.8%
🇦🇷 Argentina: -9.5%
🇪🇸 Spain: -9.1%
🇮🇷 Iran: -7.9%
🇷🇺 Russia: -6.5%
🇳🇬 Nigeria: -5.6%
🇻🇳 Vietnam: -5%
🇿🇦 South Africa: -3.2%
🇮🇹 Italy: -3.1%
🇹🇷 Turkey: -2.2%
🇪🇹 Ethiopia: -1.7%
🇨🇳 China: -1.1%
🇫🇷 France: -0.8%
🇪🇬 Egypt: 0%
🇸🇦 Saudi Arabia: 0.1%
🇮🇩 Indonesia: 2.2%
🇭🇷 Croatia: 2.5%
🇲🇩 Moldova: 3.7%
🇯🇴 Jordan: 4.1%
🌍 World: -11.19%
2
5
304
Joseph A. di Paolantonio retweeted
26 May 2023
A physical thing like an industrial robot is represented as a digital twin.
Sometimes this thing contains one or more subsystems that are complicated enough to warrant their own digital twins. There’s a parent/child relationship between the subsystem digital twins and the digital twin of the the overall physical thing.
Sometimes the the physical thing belongs to a group of other physical things. For instance, a collection of industrial robots working together forms an assembly line. That group could also be described as a digital twin. There would be a parent/child relationship between the member digital twins (industrial robots) and the digital twin of the overall group (assembly lines).
As you might imagine, a collection of groups could also be represented as a digital twin. For instance, a collection of assembly lines forms a factory. Another example would be how a collection of conference rooms, offices, and floors would form a commercial office building.
The properties of child digital twins map to the properties of the parent digital twin to express causal relationships.

1
10
15
1,810
Joseph A. di Paolantonio retweeted
26 May 2023
The [digital] Twin of [digital] Twins is a key concept.
A jet engine consists of many complex sub-assemblies and the similar twin or twin applies just like the #DigitalTwin of #aircraft would contain engine[s] twin as well as avionics and other key parts.
26 May 2023

A physical thing like an industrial robot is represented as a digital twin.
Sometimes this thing contains one or more subsystems that are complicated enough to warrant their own digital twins. There’s a parent/child relationship between the subsystem digital twins and the digital twin of the the overall physical thing.
Sometimes the the physical thing belongs to a group of other physical things. For instance, a collection of industrial robots working together forms an assembly line. That group could also be described as a digital twin. There would be a parent/child relationship between the member digital twins (industrial robots) and the digital twin of the overall group (assembly lines).
As you might imagine, a collection of groups could also be represented as a digital twin. For instance, a collection of assembly lines forms a factory. Another example would be how a collection of conference rooms, offices, and floors would form a commercial office building.
The properties of child digital twins map to the properties of the parent digital twin to express causal relationships.
1
4
114
Joseph A. di Paolantonio retweeted
26 May 2023
#Quantum computing is on the rise! What happens when High Performance Computing shifts gradually to #Quantumcomputing platforms? What will happen to the traditional #CPU and #GPU consumption? @RobTiffany @rwang0 @EvanKirstel @JAdP
25 May 2023

Nvidia $NVDA CEO Jensen Huang said last week
“We have reinvented computing for the first time since the IBM system 360 60 years ago"
6
5
1,692
Joseph A. di Paolantonio retweeted

26 May 2023
The @IoTCommunity is thrilled to announce @RothfussDiana, Strategy Director, for Fraud and Financial Crimes @SASsoftware, joins the SPTIoTCoE.
Diana has been Appointed as a Pillar of Excellence Leader in the SPTIoTCoE.
iotpractitioner.com/diana-ro…
#IoTCommunity #SPTIoTCoE
ALT Diana Rothfuss joins the following members of the SPTIoTCoE: Cory Latschkowski- Senior Specialist Solutions Architect, OpenShift, Red Hat Evelyn de Souza – Trust and Privacy Leader, Oracle CloudTrust and Privacy Leader, Oracle Cloud David Maher- EVP and CTO at Intertrust Ted DellaVecchia- Founder, CEO and Managing Partner of Symbotix George Young- Chief Information Security Officer and Chief Technologist, for CBT
1
2
232
Joseph A. di Paolantonio retweeted
26 May 2023
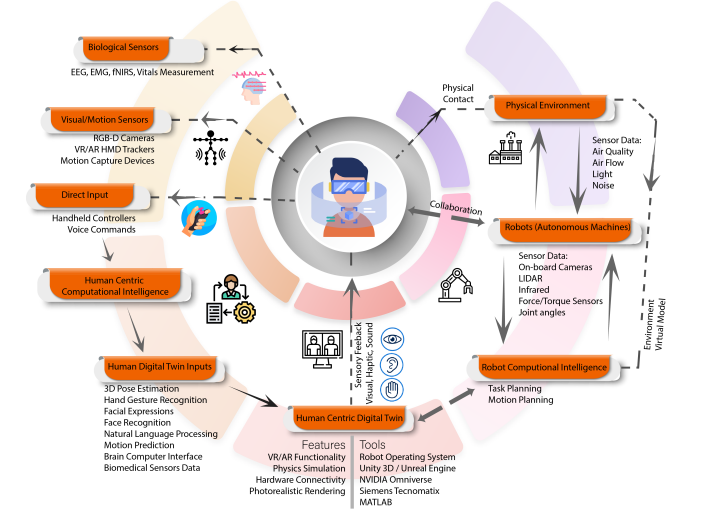
Digital twin of humans is a virtual model of a person that can be used to track their health, fitness, and performance. It can also be used to predict future health risks and to develop personalized treatment plans. #digitaltwins @RobTiffany

4
8
245