
#Postdoc at @UofMaryland, focusing on #MachineLearning and #robotics. Grad of @UVI_edu, @Norfolkstate, @USouthFlorida. Pilot. #VINice 🇻🇮
Joined September 2016
- Tweets 810
- Following 486
- Followers 224
- Likes 1,135
111 Photos and videos












19 May 2025
Excited to share our paper on the SET Perceptual Factors Framework was accepted to #PTAS! 🚗🤖
SET helps autonomous systems identify and model how weather, glare, sensor limits, and other factors impact perception-making safety risks more transparent and building public trust.
1
1
47
27 Nov 2024
Thank you Dr. Morehouse and #FEF for this opportunity, especially Taylor Rodman, Ph.D. (@itsDrRodman) for the invitation! See everyone again next year! 🤞🏾
#McKnightDoctoralFellowship #McKnightFellow #McKnightGrad #FloridaEducationFund #USF #USFgrad #GoBulls
53
13 Nov 2024
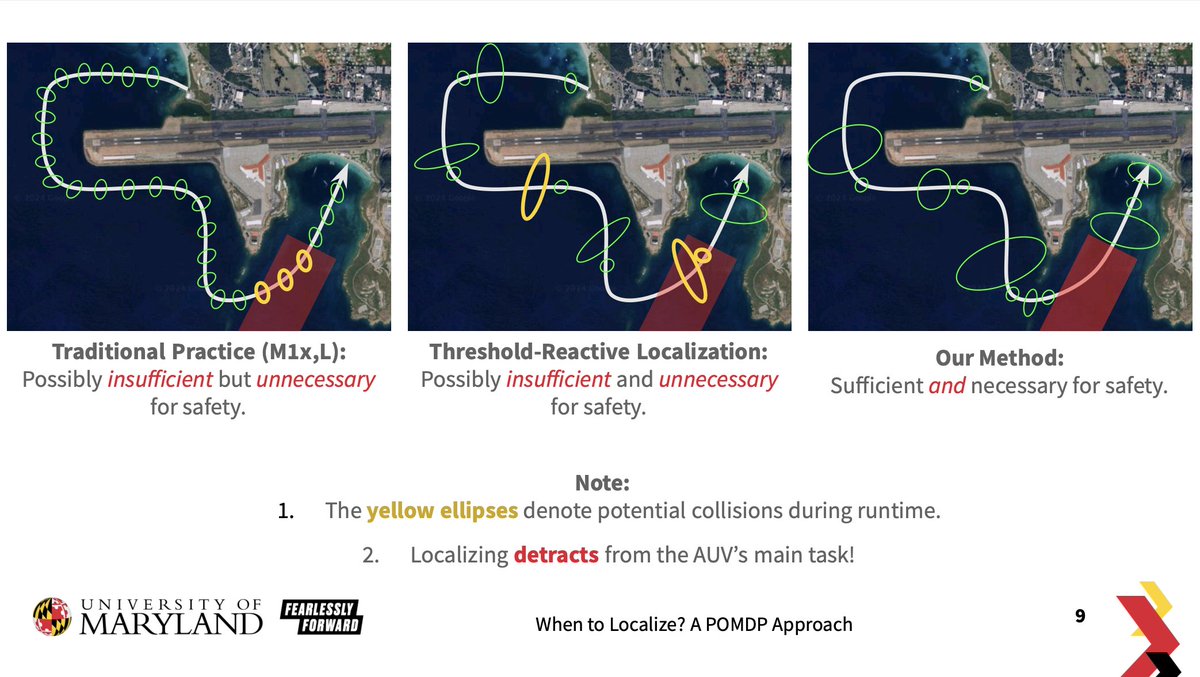
“To #localize? Or not to localize?”
I will address this question at the 2024 #IEEE #SSRR conference today in Session 2! 🤖
This starts a line of research challenging our traditional “sense => localize => plan => act” paradigm & proposes that we localize only when necessary. 🤷🏾♂️

Happening today: @troidre will present at the IEEE International Symposium on Safety, Security, and Rescue Robotics @ieeeSSRR
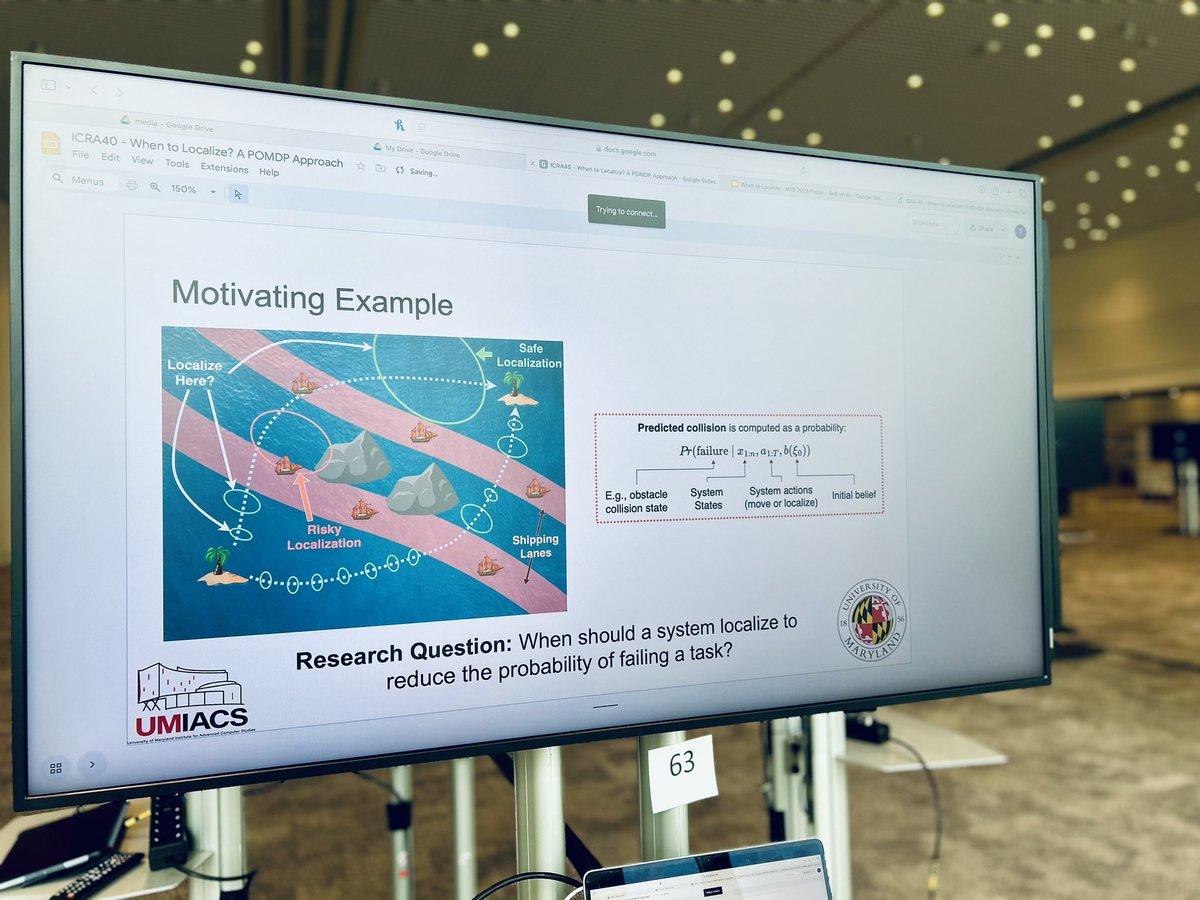
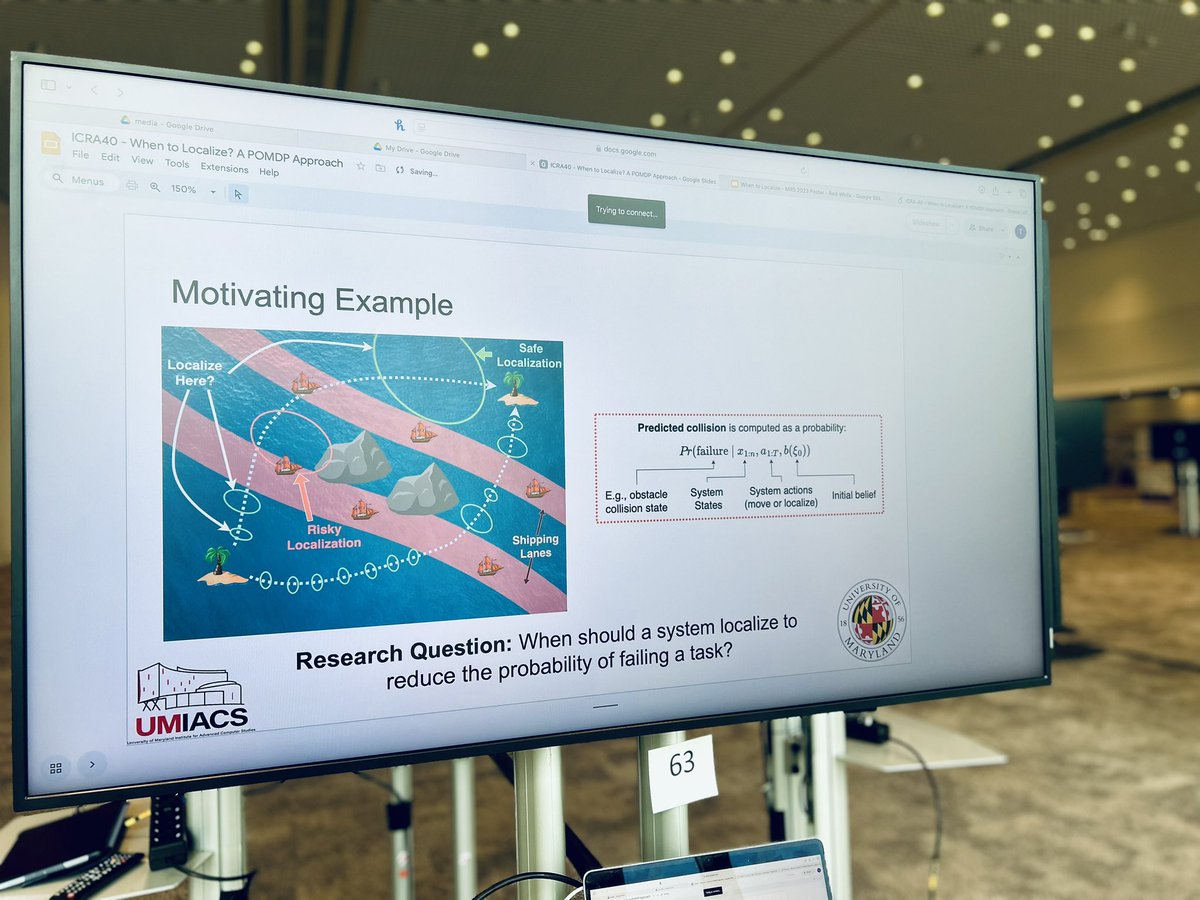
Paper: When to Localize? A POMDP Approach
with Kasra Torshizi and @ptokekar
Nov 13, Session 2, 9AM
1
1
126
13 Nov 2024
Thank you to:
- My collaborators at @umdcs: Kasra Torshizi and @ptokekar!
- My funders: @UofMaryland #Presidents #Postdoc Fellowship, @UMD_postdocs, & #RISEUPP (riseupp.org/).
- #YiannisAloimonos (from @prgumd) for the Shakespeare-inspired line!
1
1
153
Troi Williams retweeted

24 Sep 2024
🚀 @troidre will present at the landmark #ICRA40 @ieee_ras_icra 🇳🇱
📅 Sep 24 1st interactive session
🤖 Curious about robot localization? We use POMDPs to decide when robots should localize, especially when the traditional paradigm is slow!
w/ Kasra Torshizi & @ptokekar

2
5
597

🚀 @troidre will present at the landmark #ICRA40 @ieee_ras_icra 🇳🇱
📅 Sep 24 1st interactive session
🤖 Curious about robot localization? We use POMDPs to decide when robots should localize, especially when the traditional paradigm is slow!
w/ Kasra Torshizi & @ptokekar
1
5
838
24 Sep 2024
🤖 Curious about novel work in robot localization and decision-making?
Our research challenges the traditional paradigm of robot localization. In short, we used #POMDP to decide when robots should localize, especially when the traditional paradigm is not advantageous!
1
74
24 Sep 2024
🚀 Thrilled to announce: I'm presenting at the landmark 40th IEEE #ICRA in Rotterdam, Netherlands! 🇳🇱
📅 Mark your calendars for Sep 24th during the first interactive session!
1
38
Troi Williams retweeted

10 Jun 2024
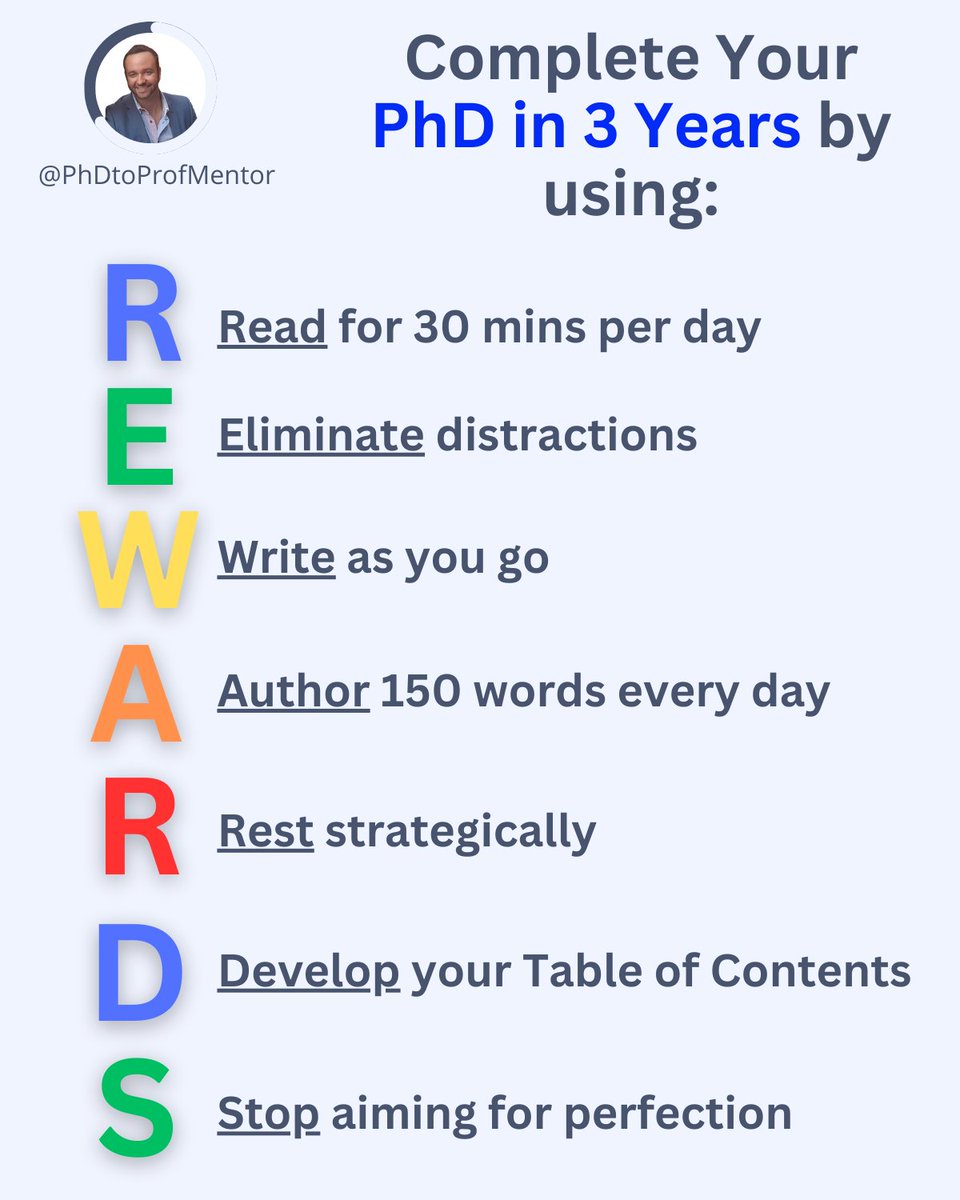
PhDs can be great fun, but don’t need to be a Marathon.
How to complete your PhD in 3 years:
22
392
1,597
300,767
Troi Williams retweeted

12 Apr 2024
Proud to host these amazing Science Terp alums today for an insightful panel discussion! @Namzo098, @kyeishalaurence, Willie May, Asha Willis and Sherita Hill Golden, we are so proud of all you have accomplished and can't wait to see what's next for you!

ALT Beyond the Lab panel with Science Terp alums
1
5
12
1,168
5 Dec 2023
Won best poster at @MultiRobotSys (#IEEE #MRS2023) for the work titled “When to Localize?”! Thanks to the amazing people who stopped by the poster to talk!
Thanks also to my mentor @ptokekar, my host institution @umiacs at #UMD, and @UMD_postdocs and @CRAtweets for funding!
1
2
21
1,461
Troi Williams retweeted
16 Oct 2023
A very cool profile of my student, Harnaik Dhami. Very proud of the work Naik’s been doing.
Naik is a rockstar “full-stack” roboticist working on planning and perception for aerial robots. He’ll be graduating next year, and is on the industry job market!
1
15
2,388
Troi Williams retweeted
2 Oct 2023
Excited to be at #IROS2023 with my team! We’ll be presenting four papers. Details in the thread below!


22 Jun 2023

1
5
38
5,272
26 Sep 2023
How can we find collision- and occlusion-free #robot (sensor) states that minimize a task's error (like #localization) AND consider the environment's effect on the sensor? 🤔
Check out our latest work, #DyFOS.
Paper: arxiv.org/abs/2211.16721
Join us at #MRS2023 to learn more!
1
4
7
1,702
26 Sep 2023
Collaborators:
Po-Lun Chen, Sparsh Bhogavilli, Vaibhav Sanjay, and @ptokekar
Thank you #NSF #CIFellows (funding), #RaasLab, and @umiacs.
1
110