
Joined March 2026
- Tweets 276
- Following 204
- Followers 63
- Likes 107
40 Photos and videos








Pinned Tweet

Apr 22
Building infrastructure for Physical AI means I spend my days talking to robotics CTOs about what’s breaking.
Everyone is obsessed with the AI models, but that's rarely what actually kills a robotics company. The real bottlenecks look like this: 🧵(1/8)
(@NVIDIARobotics has been super helpful with their showcase where I actually found people to talk too)
1
1
5
469
Ah this is so good! More frontier labs getting into robotics..the learning never stops!

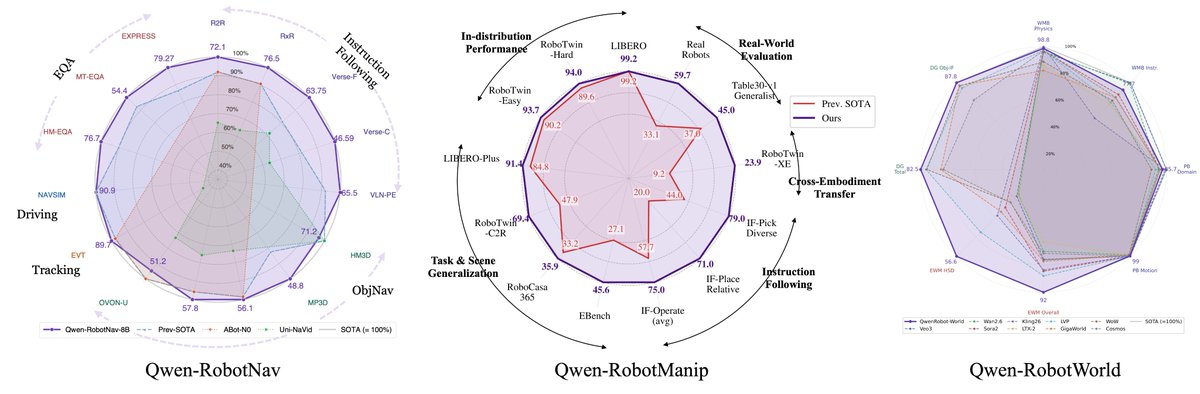
📣 Introducing the Qwen-Robot Suite — Qwen-RobotNav, Qwen-RobotManip, Qwen-RobotWorld, three foundation models, a full stack for embodied intelligence.
🧭 Qwen-RobotNav — the gateway to mobility.
• Unifies 5 navigation tasks in one model: instruction following, point-goal, object-goal, target tracking, autonomous driving
• Controllable observation protocol
• Tool interface for agentic systems
🤖 Qwen-RobotManip — the foundation of interaction.
• Unified state-action space across heterogeneous robots
• Camera-frame delta poses for coherent cross-embodiment training
• Pretrained on a 38,100 hour open-source corpus
🌍 Qwen-RobotWorld — infinite worlds for physical agents.
• Single world model, 20 embodiments
• Natural-language action interface
• Predicts physically grounded futures across manipulation, driving, and navigation
Each model is independently useful, and could be composed as physical-world tools.Together, they form the low-level toolkit for general-purpose agentic systems that don't just see the world, but act in it.
📷 Blog:
qwen.ai/blog?id=qwen-robotsu…
📖 Report:
Qwen-RobotNav: qianwen-res.oss-accelerate.a…
Qwen-RobotManip: qianwen-res.oss-accelerate.a…
Qwen-RobotWorld: qianwen-res.oss-accelerate.a…

11
Jun 13
This is a strong wakeup call. You need to invest in local AI, your own inference NOW
Not long before this becomes the norm
Jun 13

The US government, citing national security authorities, has issued an export control directive to suspend all access to Fable 5 and Mythos 5 by any foreign national, whether inside or outside the United States, including foreign national Anthropic employees.
The net effect of this order is that we must abruptly disable Fable 5 and Mythos 5 for all our customers to ensure compliance.
Access to all other Claude models is not affected.
We apologize for this disruption to our customers. We believe this is a misunderstanding and are working to restore access as soon as possible.
Read our full statement: anthropic.com/news/fable-myt…
1
12
Jun 12
Once you use it, it got me emotionally invested!
This is a fantastic demo @KuphDev As a fellow co-founder, really appreciate you and I can understand the pains you went to get here!

Control my robot LIVE 24/7 🔴🦾🐤
Quote or reply to this post with a command like:
“Put the green duck on the target”
(Green, pink, orange, or yellow)
It’s running now with a janky vibe-coded Python script
First one to break it wins bragging rights x.com/i/broadcasts/1mxPaaRvn…
1
1
179
Jun 3
Anyone with an alternative for @loom? Since Altassian acquisition, this service has become terrible. It cant even handle 2 min long videos
3
1
70
Jun 3
Trying to get my sim setup working similar to my physical setup using april tags using NVIDIA Isaac sim
Reason for doing this is to have a proper sim-eval. You just hear "use sim for eval or RL", but didnt find a good way to do scene matching which is important for VLA
1
4
149
Jun 2
Interesting choice of Android. Especially with Google moving towards a more closed android I wonder if we are going to see forks?
Jun 2

will be interesting to see where Microsoft goes with Project Solara. It has tried and failed to build platforms for many devices in the past - Band, Cortana devices, Windows Phone, the list goes on. This time it's using a version of Android, anticipating future AI agent hardware

1
28
Jun 1
This is what makes me more bullish on software engineering. Even after Opus 4.8, Mythos and what not, we are still in an era where debugging in production is required.
If a frontier lab has to undergo this, imagine what a tier 2/3 company has to face as challenges. And I am saying this with absolute respect for the scaling that Anthropic team has to do.
Jun 1

We've reset 5-hour and weekly rate limits for all users on Pro and Max plans.
We fixed an issue that caused some Claude Code sessions to spawn excessive parallel subagents, burning through usage faster than expected.
2
41
Jun 1
So they took the one thing DGX Spark was bad at which is poor bandwidth and made it into a laptop! Man @NVIDIARTXSpark is going to bankrupt me :)
Jun 1
Nvidia just officially announced its Windows on ARM chips. RTX Spark is “the most efficient PC chip ever built,” apparently. Nvidia has worked with Microsoft on RTX Spark laptops, with up to 128GB of unified memory for running large AI workloads locally theverge.com/tech/940589/nvi…
1
80
May 29
Looking forward to try this out!
@antirez curious to hear your thoughts on using this as a target model for DwarfStar4. Especially with the newly added support for distributed inference.
May 29

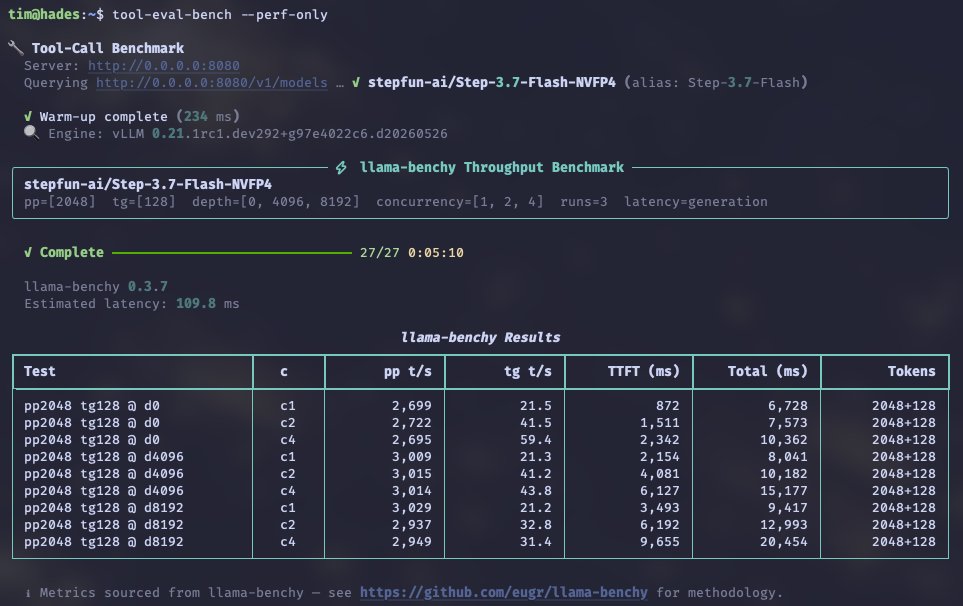
🔬 It's always fun to take new open models for a spin — StepFun's Step 3.7 Flash (MoE) dropped today, so I ran the NVFP4 variant on my 2x DGX Spark setup.
First impressions:
→ Prefill throughput is solid (~2.7-3K t/s)
→ Decode is on the slower side (~21-42 t/s depending on concurrency)
→ The NVFP4 variant doesn't ship MTP-layer weights — that's a miss
→ KV cache is hungry
Tool-calling quality scored a perfect 100/100 on tool-eval-bench — all 15 scenarios passed. But responsiveness landed at 30/100 with a 5.3s median turn time.
The pattern is interesting: high quality output, but the latency cost is real. Usable for daily experiments, but this quant doesn't quite compete with faster options for interactive use.
Release: static.stepfun.com/blog/step…
NVFP4 variant: huggingface.co/stepfun-ai/St…

1
61
May 29
Some progress on my continous improvement loop for improving and managing robots!
Was able to connect my SO-101 and my mujoco simulated SO-101 to my console and start generating the data.
Data visualization, train & deploy coming up next!
3
2
13
951
May 28
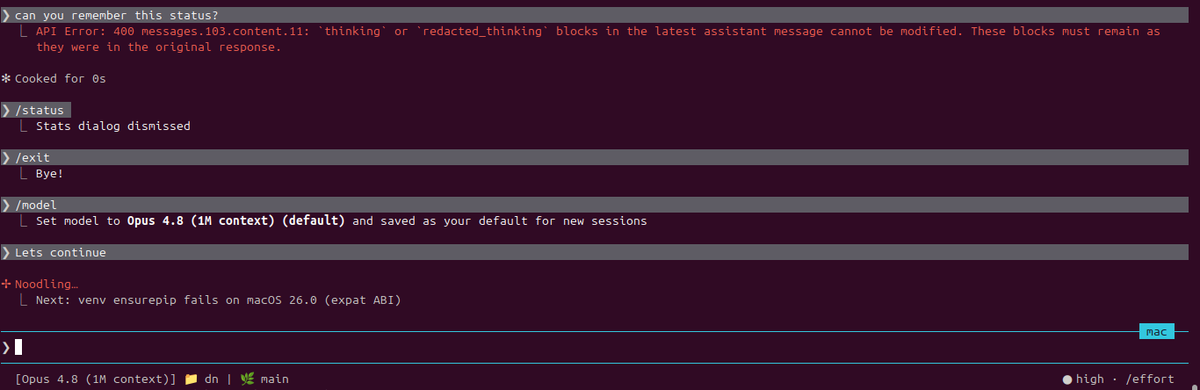
Opus 4.8 is here, and what a weird way for me to find it out.
(Also showcases the state of AI model deployment today & the challenges of it)

1
60
May 28
This is good, but @googlegemma what is your planned developer support and long term commitment? Speaking as a first gen Coral TPU user who also worked on Jetson nano at the same time frame.
The TPU, especially USB stick was a great form factor, too sad it never received love from Google.
May 27

Introducing the newest Coral board, for efficient, on-device AI!
Check out the demos in the video:
- On-board speech translation
- Natural language controlling hardware
- Vision & sound generating music
1
51
May 21
The Jetson Thor is an underrated device, I would say all of Jetson's are still underrated.
The MIG (multi instance GPU aka slicing the single GPU into multiple parts to pin workloads, avoids thrashing /contention) support is not so well known, when that itself is a killer feature if you are shipping mission critical Edge AI/robotics workload.
Super happy with my Jetson family setup!
May 21

🎉 NVIDIA Jetson Thor won the COMPUTEX Best Choice Golden Award as the most powerful edge AI compute platform for physical AI and autonomous machines.
Built to bring generative AI to smart robots, industrial systems, and medical devices, it delivers breakthrough performance and efficiency at the edge.
Learn more ➡️ nvda.ws/4fxwRtk
#COMPUTEX2026
2
3
128
May 21
Yes! Waiting for the qspf cable to show up. That will allow me to connect both together and run larger models ( total 256 GB unified after connecting)
May 21

I believe both are same hardware with different branding , should go nicely together .
1
1
75
May 21
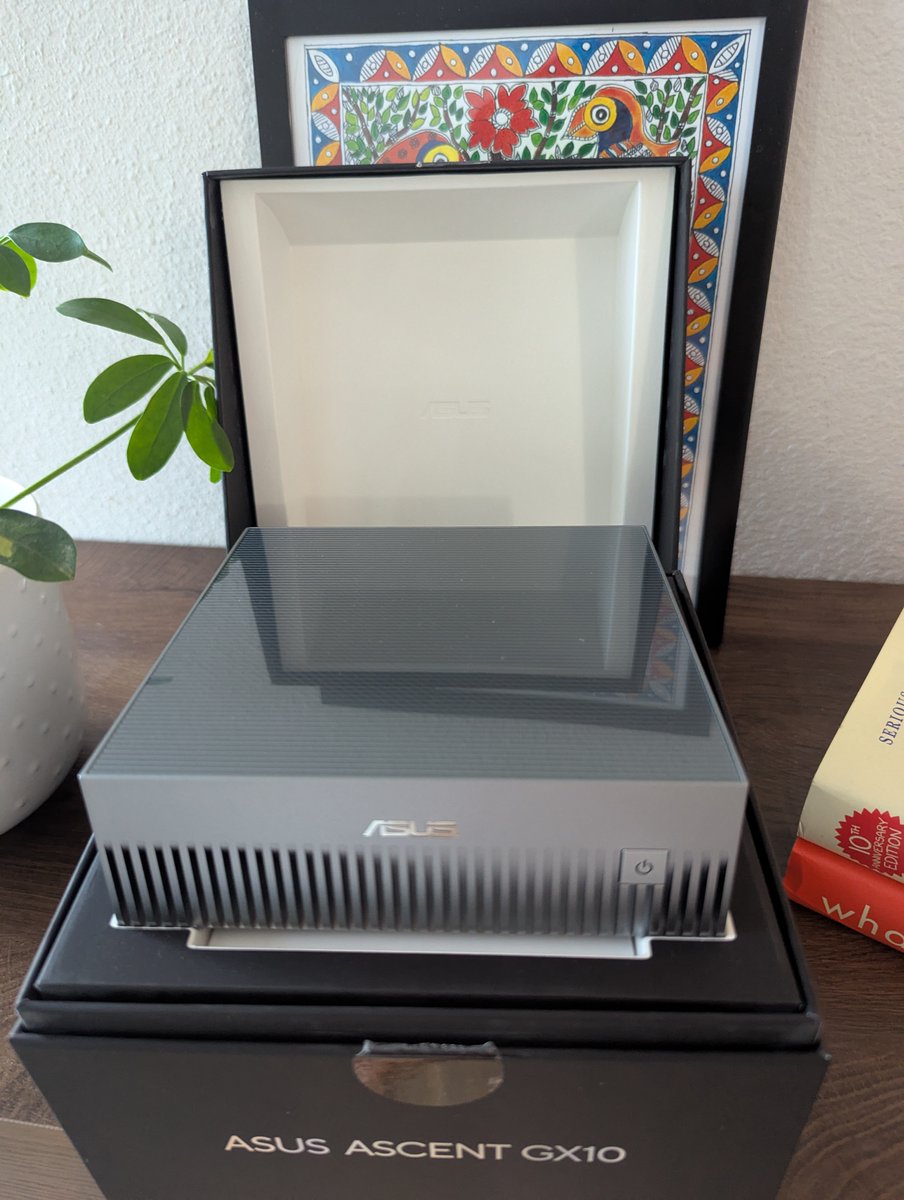
The first thing I am noticing about Asus GX10 is, it has got a power button up front!
Much better compared that to DGX Spark it was always hard to tell if it was running or not. Now atleast it has a company!
May 21
Just bumped by local AI setup!
Welcoming Asus GX10, should go nicely with my DGX Spark! Now waiting for the QSFP cable to show up 😀

4
1
16
1,308
May 21
Just bumped by local AI setup!
Welcoming Asus GX10, should go nicely with my DGX Spark! Now waiting for the QSFP cable to show up 😀
4
1
22
3,832
May 17
Looks like @AnthropicAI @claudeai is always finding new ways of rate limiting even after paying for the max 20x plan. This was today.
Totally can understand what pro and max 5x users go through regularly
31
May 14
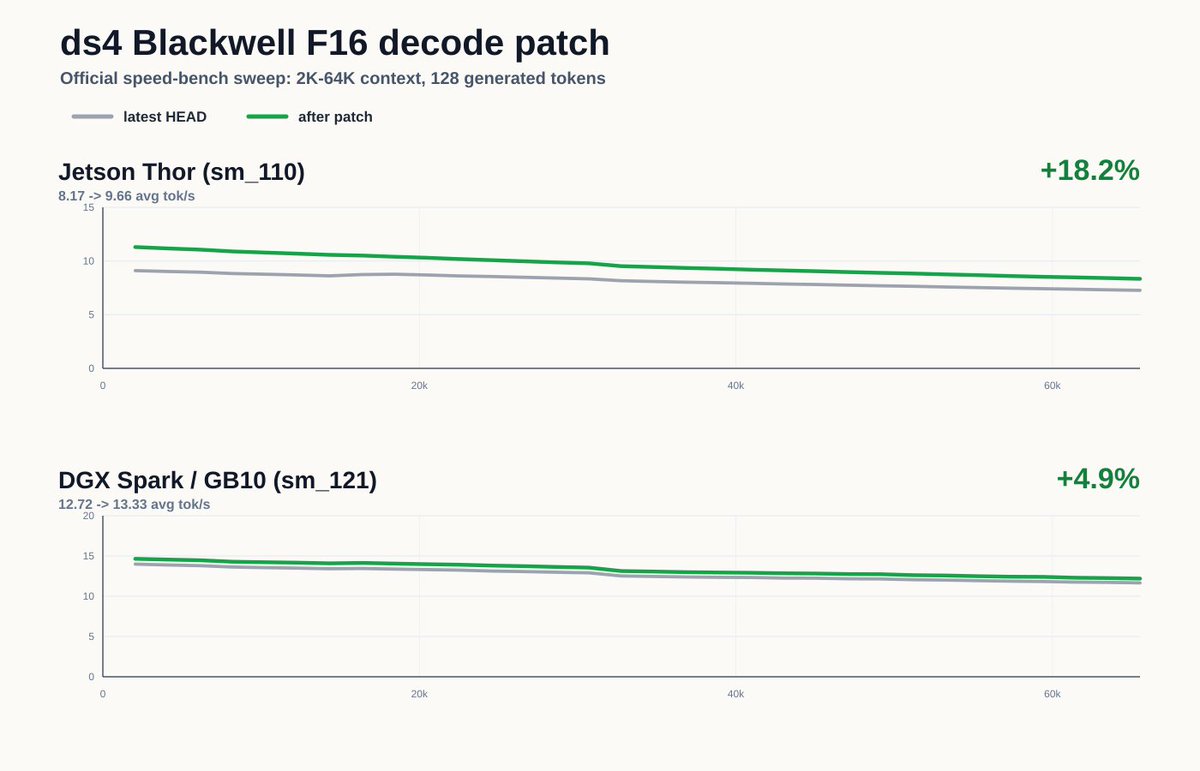
Wow..who all thinks this needs a DS4 treatment?
May 14

🚀 Ring-2.6-1T is now open source.
A trillion-scale flagship thinking model built for real-world complex tasks: Agent workflows, coding & engineering, long-horizon tasks, complex reasoning, research, and enterprise automation.
It is designed to move beyond “answering” toward execution: understanding context, planning steps, calling tools, and staying stable across long task chains.
Highlights:
- Advanced agentic workflow support.
- Reasoning effort levels: high for agentic tasks, xhigh for complex reasoning.
- Scalable asynchronous RL via the IcePop algorithm, enabling stable, trillion-scale training for long-horizon agentic RL.
68
May 14
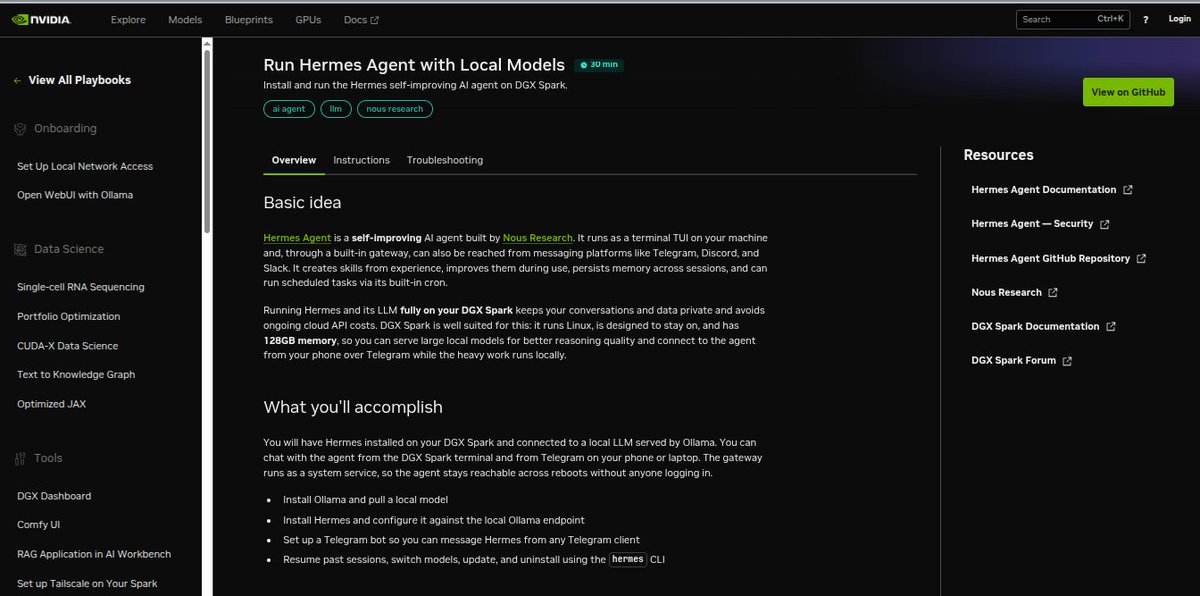
Looks like @NVIDIAAI has released official getting started guide for hermes on DGX Spark!
Great way for new folks to get started and believe in local agentic AI
7
6
75
12,916