
24 Photos and videos










🤯
Mar 18

Additional to a team of people who can deploy world model based manipulation model on humanoids (Please read dit4dit.github.io), Mondo also has a team of people who can build the best consumer robot in the world. You will get this robot at a low price soon.
1
1
81

Fahim retweeted

May 12
🚀 After a year of quiet building, I’m excited to officially announce @champ_hq out of stealth. We're also announcing our $8.5M Seed round led by @Redpoint with participation from @defyvc , @Max , @svangel, and a great group of angels. Watch the quick launch video below
16
18
50
8,071
Fahim retweeted

May 3
software engineers before vs after agents

469
1,306
19,901
5,060,796

Announcing the companies Sponsoring the Situation.
@meetgranola
@kong
@macroscope
@blitzyai
@merge_api
@adquick

8
14
208
24,149
Excited to try this out.
Apr 30

Editframe is an agent-native format, HTML/CSS to MP4, built for agents
We built Editframe on modern web standards and browser APIs so agents can finally edit videos build full interactive GUIs.
• Framework agnostic (HTML CSS, works with React)
• True browser rendering (DOM Canvas)
• Cloud streaming previews API rendering
• Lego-style bricks for custom editors or form-based workflows
This is what agent video should look like. The entire stack was built to work together.
RT Comment "Editframe" to get the launch video source code.
What will you build?
editframe.com/
2
3
82
🔥 🔥 🔥
Apr 30
Today, @editframe emerges from stealth. Agents need video.
Editframe Agent Skills:
npm create @editframe@latest
Just prompt Claude Code, Cursor, or Codex and get a working video or a full interactive GUI.
This video was created just by prompting 👇
2
182
Fahim retweeted

Apr 23
Full-circle moment: @AdQuick was @tbpn's second-ever sponsor. Now we're running their @TheEmmys FYC campaign across Sunset, Hollywood, Mid-Wilshire, Santa Monica & Vine starting May 4.
"The most influential show you've never heard of." — @thefp
Let's get that that Emmy @johncoogan @jordihays @DylanAbruscato. 🏆
variety.com/2026/tv/news/tbp…
1
4
17
579
Fahim retweeted

Apr 10
“If I have your money, I’m fucked.”
Jimmy Iovine on why entrepreneurs don’t thrive in large companies—and why he had to leave Apple:
“I couldn't do me there.
I couldn't have that compulsion, obsessiveness, and insanity [that entrepreneurs have] and not have the wheel completely.
I needed the ability to make any mistake I wanted.
I needed the ability to experiment.
I needed the ability to just GO!”
Feb 1

My conversation with Jimmy Iovine (@jimmyiovine_), co-founder of @Interscope Records & @BeatsbyDre.
0:00 The Corny World of Fame
0:54 The Impact of Social Media on Fame
1:27 Chasing Greatness: Personal Reflections
2:10 Technological Shifts in the Music Industry
3:24 The Streaming Service Dilemma
5:34 The Artist's Perspective on Streaming
6:39 Early Career and Influences
9:40 The Importance of Humility
11:19 Working with the Best: A Career Retrospective
13:07 The Role of Brutal Honesty
15:00 Navigating the Music Industry
33:50 The Birth of Beats by Dre
46:14 The Music Industry's Customer Problem
46:44 Vertically Integrating Culture and Fashion
47:13 Building Beats: From Music Videos to Headphones
48:03 Marketing is Empathy
50:28 The Journey of Beats Music
59:09 The Future of the Music Industry with AI
1:14:40 The Bend in the Pipe: Harnessing Fear and Obsession
1:29:12 Comparing Work Approaches with Dr. Dre
1:30:50 The Tortured Path to Success
1:32:41 Balancing Happiness and Ambition
1:35:22 The Importance of Peace and Therapy
1:49:30 Learning from Legends
1:55:57 The Influence of Bono and Dre
2:00:15 California Dreams and Career Milestones
2:07:20 Final Thoughts and Reflections
Includes paid partnerships.
7
39
386
117,003
Wow forgot about how I was obsessed with this game as a child and it's back wesnoth.org/
1
1
95
Fahim retweeted

Apr 5
You can now arrange your tabs in a vertical sidebar in Chrome!
1) chrome://flags and enable Vertical Tabs
2) Settings -> Appearance -> set "Tab strip position" to Side
Uses the real estate of an external monitor better, and easier tab switching for those of us with a few too many tabs open.
48
33
884
150,083
Our AdQuick CEO will be on TBPN today discussing our strategic round @tbpn @dappermarketer

Happy Wednesday. On today's show:
- @matthuang (Paradigm)
- @gakonst (Paradigm)
- @andyfang (DoorDash)
- @dappermarketer (AdQuick)
- @chrishlad (Hanover Park)
- @mattjayson (Multiply)
- @DrCamRx (Maximus)
See you on the stream.
1
147
Fahim retweeted

Mar 12
Spotted in Dogpatch 👀
First YC ad/billboard?

18
10
298
29,399
Fahim retweeted

Mar 5
Built a live NYC building permit map on top of @_coenen’s awesome isometric pixel-art
color-coded by permit type — demolitions, new buildings, plumbing, mechanical, solar. Click any dot for full details.
~1,000 fresh permits every day
35
100
1,099
148,751
Fahim retweeted

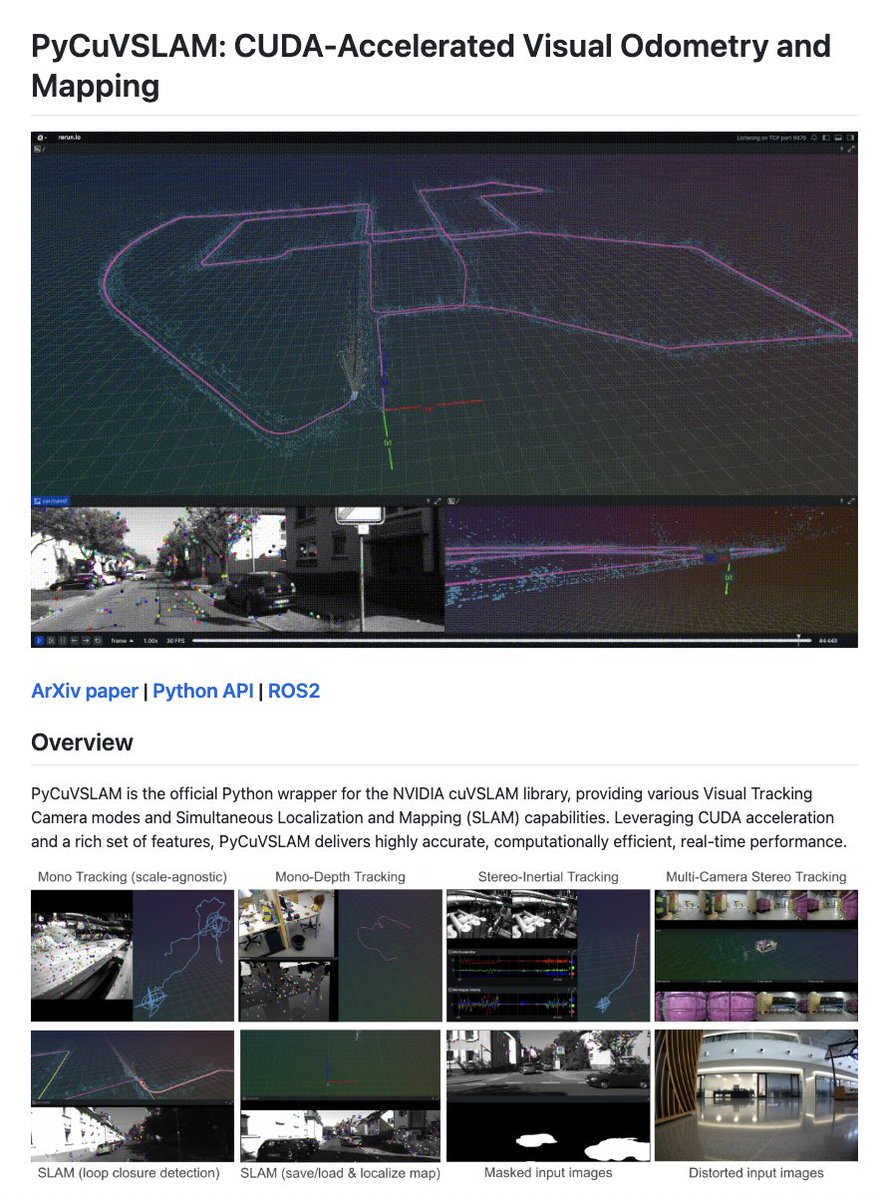
Python SLAM library with CUDA acceleration! 🧭
[📍save it to build a robot that needs to navigate autonomously]
NVIDIA's NVlabs recently released PyCuVSLAM on GitHub, a Python wrapper for their CUDA-accelerated cuVSLAM library.
Almost 900 ⭐️ on the repo! 😮💨
This brings state-of-the-art SLAM to Python workflows with real-time performance and visual-inertial precision.
It runs on both desktop GPUs and Jetson platforms.
What's inside? Python API for NVIDIA cuVSLAM, real-time SLAM with CUDA acceleration, support for standard datasets like KITTI and EuRoC plus hardware like OAK-D and RealSense cameras, multi-platform compatibility on Ubuntu 22.04/24.04 and Jetson (JetPack 6.1/6.2), and integration with ROS 2 via Isaac ROS.
SLAM is fundamental for any mobile robot that needs to navigate unknown environments. The robot needs to simultaneously build a map of its surroundings while figuring out where it is on that map.
This is computationally expensive, especially when processing camera and IMU data in real time.
CUDA acceleration is what makes this practical. By offloading the heavy computation to the GPU, PyCuVSLAM can process visual-inertial data fast enough for real-time operation on platforms like Jetson.
Having a Python interface to a high-performance SLAM library means you can integrate it into existing pipelines without rewriting everything in C .
Whether you're building SLAM pipelines for drones, ground robots, or autonomous vehicles, this is a solid foundation.
Check it out on GitHub: github.com/NVlabs/PyCuVSLAM
~~
♻️ Join the weekly robotics newsletter, and never miss any news → ziegler.substack.com
7
95
539
25,333
Fahim retweeted

Jan 27
our insane cost of housing is the problem of problems. almost every social ill is exacerbated by a general sense of anxiety rooted in housing insecurity. every politician should have a plan to address it, and if they don't they should to be fired.
193
191
2,146
344,900