
Jun 14
Een krachtigere computerchip zal de visuele en handmatige problemen van humanoïde robots niet op zichzelf oplossen.
Hoewel rekenkracht helpt bij het sneller verwerken van data, liggen de grootste knelpunten in de fysieke beperkingen van de hardware en de complexiteit van de echte wereld.
De uitdagingen zijn opgesplitst in de fysieke en softwarematige realiteit:
1. Visuele problemen (Zien en begrijpen)
- Sensoren versus rekenkracht:
Een snellere chip kan algoritmes sneller laten draaien, maar kan geen data verzinnen die de sensor niet opvangt.
Huidige camera's hebben moeite met fel zonlicht, reflecties, en dieptewaarneming in complexe omgevingen [The Robot Report].
- Onvoorspelbaarheid:
De fysieke wereld is chaotisch.
Het interpreteren van overlappende objecten, schaduwen en onbekende vormen vereist enorme 'intelligentie' in plaats van alleen brute rekenkracht [MIT News].
2. Handmatige problemen (Aanraken en manipuleren)
- Fijne motoriek:
Het oppakken van een breekbaar ei of het omdraaien van een sleutel vereist extreem nauwkeurige motoren en tactiele sensoren in de 'huid' van de robot [IEEE Spectrum].
- Zwaartekracht en wrijving:
Het berekenen van de juiste hoeveelheid kracht om een object vast te pakken zonder het te pletten (tactiele feedback) is een probleem van natuurkunde en materiaalkunde, niet alleen van software.
De echte doorbraak
Vooruitgang zit momenteel vooral in AI-modellen (zoals End-to-End neurale netwerken) en simulaties [MIT News].
Robots leren taken nu beter uitvoeren door ze miljoenen keren in een gesimuleerde omgeving te oefenen, waarna de geleerde vaardigheden worden overgedragen op de fysieke robot
1
32

Jun 13
So Quatsch: aus Sand wird ein Computerchip. Erheblicher Mehrwert. Menschliche Arbeitszeit ist nur ein untergeordneter Aspekt. Und am Ende profitieren davon viele. Keiner verliert.
3
25

May 4
Tesla ist diversification.
Energy
->Solargeschäfft Tesla Solar Roof( Energiegewinnung)
->Batterie Tesla Powerwall & Megapack (Energie Speicher)
->Supercharger Network & Power Wall App (Energie handel)
Transport
-> Auto Manufaktur
-> Taxi Service
Software
-> FSD
-> In Car App Plattform
-> Auto Manufaktur
-> Optimus
-> Colossus Super Computer I & II
Robotik
-> Auto Manufaktur
-> Optimus
ComputerChip
-> Interne Hardware Design
-> Fab( in the making)
Fonds machen nix anderes als Firmen auszuwählen die einen "guten Mix" ergeben.
Das ist keine Finanzberatung!
Selbst denken und recherchieren!
3
81

Apr 26
#Wissenschaft.Die #Befreiung des Geistes , der während Jahrhunderten durch #dogmatisch-#religiöse Vorherrschaft geknechtet , worden war , führte in verhältnismäßig kurzer Zeit zu einer fulminanten Entwicklung in in verschiedenen Bereichen des Lebens. Dies führte zu Wissen , das zum Wohl und zur Freude des Menschen wird , sofern #verantwortungsbewusst damit #umgegangen wird. Bild: Computerchip.

4
49
315


Mar 15
Oh to be a girl from east Germany working in a Computerchip factory of the Robotron combine ca 1983
1
15
582

Feb 11
Doch.
>psi.ch
> /de/news/medienmitteilungen/neuer-roentgenweltrekord-blick-in-einen-computerchip-auf-4-nanometer-genau
Hier noch die zerlegte url
1
2
8

🆘Gedanken unter Strom🔌 Patent zur Gehirnmanipulation mittels Stromleitungen in Gebäuden
Das US-Patent 8579793 B1 zeigt eine Methode und ein Gerät, um die Gehirnwellen über die Stromkabel eines Hauses zu beeinflussen. Es nutzt einen speziellen Computerchip, um bestimmte Signale zu erzeugen, die dann die Gehirnwellen verändern können. Diese Signale werden über die normalen Stromleitungen im Haus verteilt und können helfen, je nach Tageszeit, das Gehirn zu beruhigen oder zu aktivieren.
Diese Technologie könnte dazu verwendet werden, die Stimmung, das Verhalten und sogar die Gedanken von Menschen zu beeinflussen.
Mögliche Anwendungsgebiete:
Medizin: Behandlung von Depressionen, Angstzuständen und anderen psychischen Erkrankungen
Militär: Beeinflussung feindlicher Soldaten oder Befragung von Gefangenen
Werbung: Beeinflussung von Kaufentscheidungen durch subliminale Botschaften
Propaganda: Beeinflussung aller Bewohner von Wohnhäusern
Quelle:
patents.google.com/patent/US…
Geteilt aus Telegram: Rabit reasearch
t.me/rabbitresearch

11
17
531


27 Nov 2025
es ist eine Katastrophe, weil Wacker in Burghausen unter anderem Polysilizium für Halbleiter herstellt und in rund jedem zweiten Computerchip weltweit extrem reines Silizium von Wacker steckt.
2
37

26 Nov 2025
Americans invented the ComputerChip,the computer,programmable logic,all different types of memory,the family of analog chips and digital chips,flash chips and flash devices.We invented the software that runs the computer.Young Americans are just as smart.We don't need foreigners.
9
219

26 Oct 2025
Google claims its Willow quantum computerchip performed a calculation out of reach for traditional, computers, one with a result that can be confirmed. sciencenews.org/article/quan…
12
10
43
18,602

19 Oct 2025
ಭಾರತದ ಮೊದಲ 7 ನ್ಯಾನೋಮೀಟರ್ ಕಂಪ್ಯೂಟರ್ ಚಿಪ್ 2028ರ ವೇಳೆಗೆ ಸಿದ್ಧ: ಅಶ್ವಿನಿ ವೈಷ್ಣವ್
#India #ComputerChip #AshwiniVaishnaw #Technology
prajavani.net/technology/gad…
1
191

15 Oct 2025
The genealogy ginger
Freaky algodoo
Computerchip
Hi chat
Severe asthma
Folder of shame
JUMP.
Kaleb and Travis
Butchfemme bcg
I've always been green!
Explosive snails
#1 Bendy fan
CEO of that one frame
Hey vro
Baby Tilly exterminator
I'm their unc
The ghost of Maçãy
Sarah Lynny
8 Oct 2025

let’s play game, list all the mutuals you can remember without saying their names
9
13
647

Heel simpel: Taiwan is de plek waar al jouw computeronderdelen gemaakt worden.
Bijna iedere computerchip komt daar vandaan, telefoon, computer, laptop, maar ook TV en auto.
China wil het al jaren in handen krijgen om zo een monopolie positie te pakken op de wereldeconomie.
1
2
71
20 Sep 2025
3 YEARS 🥹🥹🥹🙏🙏🙏 I'M SO HAPPY FOR U, may computerchip live on !!!
1
2
70

20 Sep 2025
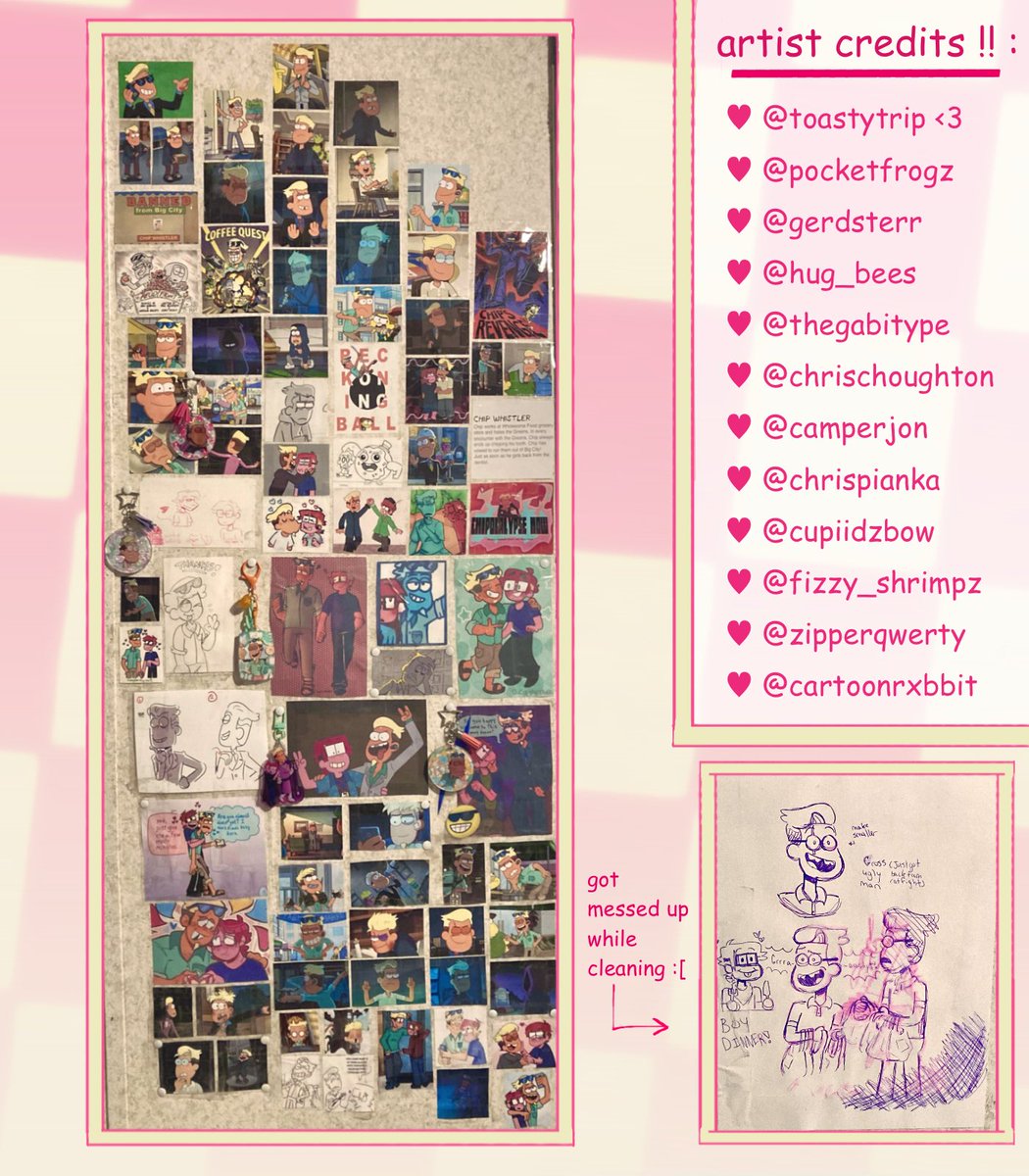
YAAAY okay computerchip 3 year anniversary WOW
first thing id like to show is a look at my updated shrine !!
added a whole lot of new goodies to my collection this year :]
(pretend these came out good)
[2/4]


1
1
6
251
13 Sep 2025
computerchip 3 year anniversary just a week away!!
3
3
17
675
3 Sep 2025
dude this is so 🥹🥹🥹you make them look so adorable 🥹🥹💜💜💜 team computerchip for life
1
2
55

3 Sep 2025
Stockfoto: Computerchip mit AI, künstliche Intelligenz
stock.adobe.com/stock-photo/…
1
33