
17 Sep 2025
《 机器人Robotics 赛道第二篇总结 》 By MMG
2025 年可以说是机器人赛道快速发展的一年。
国内有宇数科技带起的机器人赛道,国外有马斯克等人形机器人Optimus概念。前爆火的人工智能大多还是在互联网、语言模型上竞争,宇树科技和马斯克是直接将人工智能大步引入到工业品。
机器人对于现在的我们来说,还是新物种 新型生产力。机器人赛道继续火热下去有望复刻 2024 的 AI 叙事。
--
接下来 会继续探索/介绍 目前整理的多个机器人(Robotics)项目
--
个人观点前置:
未发币看好的项目有: openmind \ psdnai \ PrismaXai
已发币看好的项目有:peaq \ RICE \ CODEC \ RBR \ SLC
主要维度是参考其 团队、背景、融资、项目进度 和用户数据等。
--
总结 相关 机器人项目/WEB3 相关,大概可以分为
网络/系统、 物理数据收集、远程操控平台、AIAGENT 几个分类
--
openmind
@openmind_agi
未发币
OpenMind 融资2000万美元,希望通过开源的系统提升机器人的理解和学习能力,其主要产品包括:
OM1:AI原生操作系统,号称“机器人的安卓系统”,硬件无关且开源。它能够赋予机器感知、记忆、规划和控制的能力,帮助机器人理解世界,并根据情境采取相关的行动。 此前在黑客松中就有选手用OM1在48小时内构建了阿尔茨海默症护理机器人。
FABRIC:去中心化协调层。通过区块链的方式,允许机器人共享数据、快速学习(如语言),并支持共识、执行和结算。
--
peaq
@peaq
120M
peaq融资2100万美金,是一个专注于DePIN和机器经济的Layer 1。
peaq支持机器人、无人机、传感器等机器设备在区块链上获得自主身份(self-sovereign IDs)、进行点对点支付、数据存储和自动化操作,能够完成诸如机器人出租、无人机交付和自主机器协作等用例,构建完整的“机器经济”,让机器人等设备也能像AI Agent一样独立赚钱和互动。
项目基于Substrate框架构建,兼容Polkadot,已连接90多个区块链。目前有peaq链上已50多个DePIN项目,包括Silencio(噪声监测)、MapMetrics(驾驶赚钱)、Farmsent(农业供应链)和Natix(智能驾驶)等。网络连接了超过450万台设备和机器,为能源、移动、交通、农业、环境等20多个行业提供去中心化网络服务。
--
GEOD
@geodnet
60M
GEODNET 融资1500万,专注于定位服务——通过去中心化的方式构建全球最大的实时动态(RTK)定位网络,提供厘米级精度的全球导航卫星系统(GNSS)服务。
项目最初构建在Polygon上,目前已拓展到Solana上。
网络允许任何人购买并安装GEODNET 的硬件矿工设备(“卫星矿工”),收集并上传 RTK 校正数据到网络,赚取 $GEOD 代币奖励,并最终赋能网络为机器人、自动驾驶车辆、无人机和元宇宙等应用提供高精度定位支持。
目前网络已覆盖 145 个国家,超过 19,000 个站点,并已交付超过 207,178 GB 的 RTK 数据。
--
psdnai
@PrismaXai
未发币
PrismaX由a16z CSX领投 ,总融资1100万美元。想要通过人工的介入,帮助机器人最终实现高度自主的能力。
目前推出远程操控(tele-op)平台,允许用户在浏览器上远程操作机械臂,并将这些操作数据转化为高质量的训练数据,对模型进行优化。这个过程中,操作员将获得平台代币奖励。
平台预计未来将远程接入宇树、优必选等多款知名机器人中。
短期内专注于远程操控与视觉数据,用于模型训练;
中期将通过远程人力指挥的方式,使机器人有能力完成实际任务;
长期看,最终实现机器人的完全或高度自主。
--
NRN
@NRNAgents
28.7M
NRN Agents 是一个运行在 Arbitrum 上的去中心化 AI Agent 开发与训练平台。最早以游戏中的 AI Agent 为起点,正在将业务逐渐拓展到具身机器人背后的AI Agent中去——通过“仿真到现实”(Sim-to-Real)框架,为机器人AI Agent提供高效的训练与部署解决方案。
用户可通过浏览器直接控制模拟机器人,每次操作生成高质量行为数据,为机器人系统提供模仿学习(Imitation Learning)的训练资料;同时,系统中的AI Agent还可以通过强化学习(Reinforcement Learning)基于现实交互持续优化,无需完全重新训练。
项目目前处于早期阶段,主要聚焦于机械臂(RME-1)的操作。后期将扩充至机器人的格斗、田径比赛等竞技运动能力。
--
AUKI
@AukiNetwork
68.4M
Auki Network想要为机器人和智能机器构建一个去中心化的神经网络,让他们对物理世界更加了解。核心业务是构建一个DePIN网络,允许各种设备(如机器人、智能眼镜)实时共享位置和感知数据,形成协作的空间理解。
网络基于Posemesh协议,包括提供计算资源的计算节点、提供运动和传感器数据的机器人等智能设备端组成的运动节点、利用前两者生成3D地图或空间模型的重建节点、以及管理这些3D空间的域名节点。这些节点会根据自己的贡献获得$AUKI代币奖励。
--
ROBOT
@RoboStack_io
2.6M
RoboStack 是一个云原生模拟和集成平台。不仅为机器人开发和部署提供逼真的环境建模和可扩展的计算基础设施,还通过 RCP(Robot Context Protocol)协议在不同的硬件、软件和通信标准之间,构建了一个标准化通信协议,简化了底层机器人硬件与软件层AI Agent 的对接。
原生代币 $ROBOT已在virtuals平台发射,用户可以在virtuals参与 $ROBOT质押,在SIM lord中为自己看好的机器人项目投票,将有机会获得奖励。
--
frodobots
@frodobots
未发币
FrodoBots Lab是一家机器人实验室,通过游戏化方式推动真实世界数据收集和具身智能发展。其核心产品 Earth Rover 是一种可远程控制的 sidewalk 机器人(在人行道上行走的机器人),售价 249-399 美元,可以用于游戏、数据收集和AI研究。目前FrodoBots 已在全球部署了数百台Earth Rover,并开源了2000小时的真实世界驾驶数据集。
FrodoBots 通过创新的机器人硬件、去中心化平台和 AI 框架,构建了一个融合娱乐与科研的生态系统。
--
BitRobotNetwork
@BitRobotNetwork
未发币
BitRobot Network 是 FrodoBots Lab 与 Protocol Labs 联合开发的基于 Solana 的去中心化平台,获 600 万美元融资。该网络采用子网(subnet)架构,每个子网贡献特定资源,如计算能力、机器人车队、数据集(真实或合成)或 AI 模型,覆盖从 sidewalk 机器人到人形机器人的多种形态。首个子网 ET Fuji 已上线,下面将详细介绍。
--
SAM
@samismoving
未发币
SAM 最初是由 FrodoBots 和
@virtuals_io
共同开发的 AI Agent,用于远程操作 Earth Rover 机器人。后来,它演变为 Robots.Fun(Launchpad)平台上发射 AI Agent 的核心框架,所有后续 AI Agent 都会基于 SAM 的架构构建,并向其支付 5% 的费用分成。
SAM 能够通过 Earth Rover 收集运行数据,用于提升整体 AI Agent 的能力。同时,它还会通过 X(Twitter)实时直播部分冒险过程,展示具体的互动、竞赛或数据收集场景,兼具娱乐性和教育价值。
--
SAPIEN
@JoinSapien
69M
Sapien(X 账号 @JoinSapien
)是一个去中心化的 AI 数据铸造厂(decentralized data foundry),旨在通过全球数百万人类贡献者创建高质量、透明的 AI 训练数据。其核心理念是“Millions of Minds Creating Quality Data”,强调人类智慧在 AI 发展中的关键作用,避免 AI 模型的“黑箱”训练过程。项目于 2025 年左右活跃起来
融资与发展:虽未直接提及具体融资,但类似项目(如 getsapien.com)已获 General Catalyst 等投资 870 万美元,用于扩展 AI 研究。Sapien 被视为“Web3 版的 Scale AI”,市场潜力巨大(AI 数据标注市场预计 2030 年达 171 亿美元)。
--
RICE
@realRiceAI
21M
RICE AI 是一个结合人工智能、机器人技术和区块链的去中心化项目,旨在解决机器人训练数据稀缺的问题,通过构建一个去中心化物理基础设施网络(DePIN)来推动通用人工智能(AGI)机器人的发展。该项目基于 Rice Robotics 的真实世界应用场景,已在日本等市场部署机器人(如 SoftBank、7-11 和 Mitsui Fudosan),并利用 $RICE 代币激励机制创建全球首个去中心化机器人 AI 数据平台。
融资与背书:已融资 750 万美元,由 FLOKI 和 DWF Labs 支持。入选 BNB Chain 的 MVB(Most Valuable Builder)程序和 NVIDIA Inception 计划,增强其在区块链和 AI 领域的信誉。
真实应用:依托 Rice Robotics 的部署经验,已在日本零售和房地产场景中应用机器人,积累真实数据。
--
CODEC
@codecopenflow
27.5M
CodecFlow(@codecopenflow
)是一个基于 Solana 区块链的 AI 和机器人执行层项目,旨在为 AI 操作员(Operators)和机器人提供统一的执行框架。它将各种输入源(如传感器、智能合约、GPS 和钱包)通过一个统一网关连接起来,利用大型语言模型(LLMs)和视觉语言模型(VLMs)进行推理、训练,并通过视觉语言动作模型(VLAs)执行动作。该项目支持从桌面设备到人形机器人、机械臂、无人机和游戏等多种应用场景,强调跨设备和跨平台的无缝集成。
CodecFlow 起源于开源 AI 机器人项目(如 Hugging Face 的 LeRobotHF),团队成员通过社区协作逐步构建。项目定位为 Solana 上的执行层,强调跨设备集成(如机器人臂、无人机),团队背景主要集中在工程和 AI 领域,而非传统区块链创始人模式。没有证据显示有知名 VC 支持或大型公司背景,但与 Hugging Face 的合作突显了其在机器人 AI 生态中的技术实力。
核心团队成员与背景:@_lilkm_
(lil’km):项目核心开发者之一,是 Hugging Face Robotics 团队的工程师,专注于 AI 与机器人领域。他负责构建 Physical AI 相关工作,并在 CodecFlow 中贡献 HIL(Human-in-the-Loop)强化学习模拟演示。该成员的背景包括机器人工程和开源项目(如 LeRobotHF),并担任 Hugging Face 机器人部门的代码审查员。这显示了团队在 AI 模型训练和机器人应用方面的专业性。
@unmoyai
(Moyai):另一位关键贡献者,一年前开始参与 CodecFlow 的开发,最初是为了帮助 @_lilkm_
提升 LeRobotHF 项目的质量生活(QoL)改进。随后,其工作扩展到 Optr(Operator Kit,早起 Alpha 版本)的开发。这表明团队具有实际的开源开发经验,专注于工具和框架的迭代。
---
RBR
@UseRobora
17.8M
Robora(@UseRobora
)是一个专注于**模块化机器人(Modular Robotics)**的Web3项目,旨在将机器人技术与区块链、AI和去中心化基础设施相结合,实现物理AI的链上验证和实际应用。根据其X账号的bio描述,它是“模块化机器人领域的第一名”(First in Modular Robotics),并链接到其官方网站(robora.xyz或类似,基于bio中的t.co短链)。
Robora(模块化机器人 Web3 项目)团队由多名在 AI、机器人软件、硬件设计和区块链领域拥有丰富经验的专业人士组成。根据项目官网(robora.xyz)和 X 账号(@UseRobora
)的公开信息,团队核心成员聚焦于将物理 AI 与去中心化技术融合,背景多来自顶级科技公司和研究机构。项目强调团队的创新性和跨学科协作,目前处于早期发展阶段,团队规模较精干(约 4-5 名核心成员公开)。
Guang Cheng Luo(罗广成) - 联合创始人(Co-founder)
背景:机器人和 AI 领域的资深研究工程师,曾在 Google DeepMind 担任研究工程师,参与先进 AI 研究项目。他的专业知识涵盖机器人算法优化和物理 AI 应用,是 Robora 愿景的核心推动者。
Larry HashpowerX(@LarryHashpowerX
) - 首席业务官(Chief Business Officer)或核心代表
背景:HashpowerX 公司的首席业务官,同时担任政策和 CID(可能指社区或加密 ID)顾问。拥有 Web3 和区块链领域的丰富经验,专注于商业拓展和合作伙伴关系。
技术团队成员Dimitri Molchanov - 软件工程师(Software Engineer)
背景:拥有超过 8 年经验,曾在顶级科技巨头(如 Google 或类似)驱动创新项目,专长包括全栈开发、云架构和可扩展系统设计。领导过影响数百万用户的项目,擅长构建高效的软件基础设施。
贡献:负责 Robora 的软件后端,支持链上计算和 AI 模块集成。
公司实体:项目由深圳 Robora Automatic Robots Ltd Enterprise 支持,这是一家位于中国深圳的实体公司,专注于自动化机器人制造,体现了团队在全球制造链上的布局
--
BREW
@homebrewrobots
这个项目是一个专注于人形机器人(humanoid robots)软件和应用开发的开源生态系统。它强调构建机器人“应用”(apps)和终端用例(end-use cases),旨在通过 AI、加密货币和开源协作来民主化机器人技术。项目以“Brewie”作为核心机器人平台,结合了硬件自定义、数据共享和软件模块化开发,目标是让独立开发者(indie devs)能够轻松构建、训练和货币化机器人技能。以下是详细分析,包括背景、核心内容、技术方面、社区与市场潜力,以及潜在挑战。
项目起源:HomebrewRobotics 源于 Homebrew Robotics Club 的理念,该俱乐部是一个硅谷的开源机器人社区,旨在通过 AI 和 crypto 推动机器人技术的开放共享。项目灵感来源于早期计算机革命(如 Homebrew Computer Club),但聚焦于现代机器人领域。官方网站(homebrew.build)强调“构建开源、负担得起的机器人生态系统”,包括数据和软件市场、AI 驱动编程工具,以及可自定义硬件的人形机器人。
--
eMDR
@modulr_cloud
28.6M
Modulr Cloud(@Modulr_Robotics
)是一个新兴的Web3项目,专注于去中心化操作系统(Decentralized Operating System),旨在为链上机器人应用(On-Chain Robotics Applications)提供底层支持。它被描述为“首个去中心化操作系统,驱动链上机器人应用”(The First Decentralized Operating System Powering On-Chain Robotics Applications),由@Theundline
团队构建。
核心创始人和领导成员Chris(@Theundline
) - 创始人(Founder)
背景:Chris 是 Modulr 的创始人,自述“Building the decentralized OS for robotics, automation and real-world systems”(构建机器人、自动化和现实世界系统的去中心化OS)。他负责项目整体愿景和技术领导,包括存储共识代码库的架构优化、伪编译器(Pseudo compiler)开发(将伪代码转换为Python和C,实现链上安全编译),以及 UndChain(Modulr 的底层链)的可靠性分数系统设计。
--
SLC
@silencioNetwork
8.4M
Silencio Network(简称 Silencio)是一个基于区块链的去中心化物理基础设施网络(DePIN),专注于通过智能手机收集全球噪声数据,解决噪声污染问题,并将其转化为可行动的洞察。该项目于2024年底启动,已发展成为Web3领域中噪声情报领域的领先者,强调社区参与、数据隐私和可持续激励机制。截至2025年9月,它已成为AI和机器人技术的重要数据来源,被誉为“世界上最大的噪声数据网络”。
Silencio Network 的团队由经验丰富的区块链、数据和技术专家组成,核心创始人三人领导项目发展。公司成立于2022年,总部位于德国慕尼黑(部分来源显示美国特拉华州威尔明顿),团队规模已从初创期的核心成员扩展到约17人,包括开发人员、UX专家、营销和合作伙伴经理等。团队强调社区驱动和创新,监督机构为 BlockSound Foundation,确保项目向去中心化治理演进。
Silencio 的创始人团队具有互补背景,专注于区块链、加密货币和数据基础设施。以下是关键成员(基于公开来源,如 Crunchbase、Tracxn 和项目官网):Thomas W. Messerer:联合创始人兼 CEO。拥有技术与区块链领域的丰富经验,领导 Silencio 的愿景,即创建全球最大的去中心化噪声数据银行。他负责整体战略,推动项目从噪声监测扩展到 AI 和机器人应用。关键成就:主导项目上链 peaq Network,并实现用户从数十万增长到 110 万 。
Theo Messerer:联合创始人兼 COO(首席运营官)。负责运营和社区管理,常代表项目参与行业活动(如 TOKEN2049)。他强调社区参与,推动 Discord 等渠道从数千成员增长到 74,000 。关键成就:协调早期用户增长和合作伙伴关系,如与 peaq 的深度集成。
Eric Stotz:联合创始人兼 CIO(首席信息官)。利用其在加密货币交易所的经验(创办 Buenbit,拥有超过 100 万用户和 150 名员工),负责信息策略和数据管理。关键成就:构建安全的去中心化数据收集系统,确保隐私和可扩展性,推动项目成为 DePIN 领域的领先者。
Silencio Network 已完成多轮融资,总额约 3.5M-4.8M 美元
融资机构有 Blockchange Ventures(领投),Borderless Capital、MV Global、Blockchain Founders Fund、Advanced Blockchain AG、Prosper GmbH & Co. KG 等
--
XRT
@AIRA_Robonomics
12.5M
Robonomics Network(简称 Robonomics,由 Airalab 团队开发)是一个去中心化的区块链平台,专注于将机器人、物联网(IoT)设备与 Web3 技术深度融合,实现机器与人类、机器与机器之间的经济和技术交互。该项目旨在构建一个安全的、成本有效的未来主义 IoT 生态系统,支持设备间的自主通信、数据存储和经济交易,而无需依赖中心化服务器,从而保护用户隐私并促进机器的经济独立。
Robonomics Network 是一个由 Airalab 团队于 2015 年发起的去中心化区块链项目,旨在通过 Web3 技术整合机器人和物联网(IoT),构建一个无需中心化服务器的机器经济生态系统。项目核心目标是实现机器人与 IoT 设备的自主交互、数据存储和经济交易,保护用户隐私并推动机器经济独立性。起源:2015 年,Airalab 开始探索多代理系统与市场机制结合,2016 年在 Ethereum 上进行无人机控制实验,2017 年发行预代币 AIRA(后转为 $XRT)。
发展历程:2018-2020:在 Ethereum 主网上线 Robonomics,支持 Liability 合约(机器人服务支付)及 IPFS 存储,验证 DePIN(去中心化物理基础设施)应用,如水上无人机环境监测。
2021-2022:转向 Polkadot/Kusama 生态,发布 Robonomics 1.0,赢得 Kusama 平行链槽位(ID 2048),推出 Datalog、DigitalTwin 等功能,发布白皮书 2.0 和资助计划。
2023-2025:开发 sensors.social 和 Tasmota 智能家居设备,推进欧盟认证,发布新 AIRA 白皮书(聚焦 AI 驱动代理),推出开源硬件(如 Altruist 传感器),并计划 Web3 机器人支持程序。
--
SHOW
@SHOW_ROBOTICS
2.7M
SHOW Robotics(X 账号:@SHOW_ROBOTICS
)是一个专注于“embodied AI”(具身人工智能)的机器人项目,旨在将人工智能与物理机器人硬件相结合,创建具有记忆、环境感知、个性和适应能力的真实机器人。他们强调“real robots, real time”(真实机器人,实时交互),目标是让个人用户能够轻松构建和拥有像伴侣、表演者或探索者这样的智能机器人。
SHOW Robotics 是一个由工程师和开发者组成的“builder collective”(构建者集体),专注于具身人工智能(embodied AI)的硬件和软件开发。该团队强调透明度和实际构建,公开分享每周构建日志(build logs),并已部分“doxxed”(公开身份),但具体成员姓名未在公开渠道中明确列出。团队的核心目标是创建如 VitaNova 这样的真实机器人,支持实时交互和个性化的 AI 体验。他们定位为“real robots, real time”(真实机器人,实时),并与 Virtuals Protocol (@virtuals_io
) 生态紧密合作。
--
ROKO
@RokoNetwork
3.1M
Roko Network($ROKO)是一个基于区块链的深度技术项目,专注于将高精度时间同步(高分辨率定时)实现为无信任(trustless)、去中心化和可编程的形式,主要应用于AI、机器人和机器共识等领域。该项目旨在构建一个自组织的人机协作网络,融合AI、机器学习、区块链和虚拟现实技术,解决传统网络中时间同步的痛点,如延迟、篡改和共识问题
核心创始人与领导层Dmitry Rakovitsky(Dmitry Rakovitsky,联合创始人兼CEO):角色:领导项目整体战略和技术方向,负责将高精度时间同步(PTP协议)与区块链集成,推动AI和机器人应用。
背景:一位经验丰富的区块链和科技企业家,专注于移动、Web 和云技术。他创办过多起初创公司,包括ROKO Labs(一家战略产品和技术咨询公司,自2012年起帮助VC/PE支持的企业和财富500强公司构建可扩展技术平台)。在ROKO Labs,他担任CEO,团队包括CTO、CPO和资深运营商,专注于数字产品开发。Dmitry 还曾领导Instabot(一个聊天机器人平台),并获得WestView Capital Partners的投资支持。
Sergei Selin(Sergei Selin,联合创始人,网络安全专家):角色:负责项目安全架构,包括反作弊机制、验证者模型和时间RPC的反签名系统,确保网络的信任less属性。
背景:网络安全领域的资深从业者,专注于算法惩罚和第三方认证(如Trust ID)的集成。他的经验帮助Roko Network防范NTP漂移和篡改攻击。团队在2024年9月的黑客马拉松帖子中提到,与Zymbit(安全计算模块)和Timebeat(硬件定时)的合作,可能涉及Sergei的输入,以构建边缘设备白皮书。
规模与文化:小型核心团队(约5-10人),强调自治和创新,如2024年12月的“团队玩弄新技术”视频和2025年3月的“AI群集”简化解释。团队活跃于X,发布周报、AMA和提案(如生态预算#2),并参与Web3 Global Talks讨论AI和平应用。
资助与支持:获得MOROS NET资助,并申请Polkadot生态资金。团队背景多样,融合区块链专家、安全工程师和企业家,但部分成员保持匿名以聚焦技术而非个人品牌。
更多内容请看:
r.memego.ai/
7
4
11
3,146

25 Aug 2025
Will start bidding the dips here on $eMDR aka Modulr
- Robotics narrative is probably the next big thing as we know the future is AI ROBOTICS. Backed by a very experienced and doxxed team:
- Christopher Boggs (18 years at Moog Space & Defence), with core dev Vlad Chernenko (EthereumJS & MetaMask contributor.
Key Features of Modulr:
Decentralized Operating System: Modulr is designed as the first decentralized OS for on-chain robotics applications, leveraging blockchain technology (specifically Ethereum) to enable secure, transparent, and permissionless interactions.
Modular Ecosystem:
The platform emphasizes modularity, allowing developers to create "co-chains" (interoperable, permissionless mini-blockchains) that can be tailored for specific robotics or machine-related protocols. These co-chains can be monetized globally via Modulr’s marketplace.
Proof-of-Utility:
Modulr operates on a Proof-of-Utility consensus mechanism, which prioritizes practical utility and real-world application over traditional proof-of-work or proof-of-stake models.
Interoperability: The system connects robotics, machines, and apps to a unified backbone, enabling seamless communication and coordination across diverse devices and applications.
Doxxed Team and Development:
The project is backed by a transparent team with over three years of development and more than 500 GitHub commits, indicating active and ongoing progress.
Rebranding:
Modulr was previously known as UndChain, with a rebrand to Modulr announced in August 2025, accompanied by a new logo, updated website, and refreshed GitBook.
Socials: linktr.ee/modulr.cloud
Chart: dextools.io/app/en/token/emd…

7
4
22
8,929

Johnny, do better you absolute grifter...
Ready for reality?
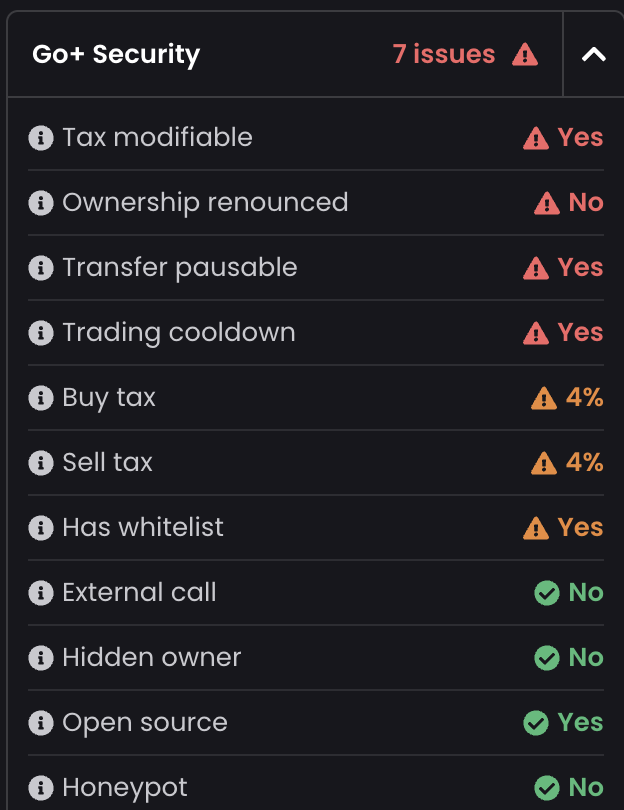
$eMDR is hot garbage 🔥🗑️
> Spun up from failed project "UndChain"
> No whitepaper, uses "UndChain" template
> Lists pillars of utility: "Compute, Storage, Access"
> Buzzword heavy slop: "web4" "gaming" "code" "social"
> 4% tax on buys and sells
> Tax can be modified
> Transfers can be paused
> Cabal coded synchronized shilling
Expect better from an account with 865,000 followers. You disgust me John 🤮
Instead of taking the easy money route and dumping on your followers you could have supported a real project in this niche:
Study $AUKI @AukiNetwork 📚

3
1
15
1,075


29 Jul 2025
Dev Update: We’ve begun work on the StorageConsensus protocol, which is the engine that enforces trust in decentralized file storage on UndChain.
- Tracks per-sector mutation history
- Reconstructs past file states for audits
- Merkle-root based proof system
- Partners are challenged deterministically to prove honesty
2
258
26 Jul 2025
Why does it matter?
Because UndChain isn't just a chain, it's a decentralized cloud.
Partners and creators power real services: storage, compute, access.
The Reliability Score tells clients who they can trust with their data and workloads.
Tracked. Verified. Immutable.
4
193
26 Jul 2025
We’re renaming Perception Score to Reliability Score in UndChain
It’s not about vibes.
It’s not subjective.
It’s not “what the network thinks.”
It’s about uptime, honesty, and consistency.
Because when your network powers apps, storage, and services, it better be reliable
2
4
251
24 Jul 2025
🧵 I’ve been thinking deeply about the roles in UndChain
Validators, partners, and clients make sense.
But what do you call the person or team that creates a co-chain?
“Chain owner” felt flat. Too bureaucratic. Too corporate.
So we’re calling them Creators.
3
3
220
22 Jul 2025
One of our goals with UndChain has always been to build out in the open not just in code, but in process.
Starting this week, we’ll begin sharing regular updates on what we’re working on behind the scenes: protocols, infrastructure, UX systems, validation logic, hardware integrations, and more. Think of this as a living changelog for the people who want to see how it’s all coming together
We'll keep it simple for now: short written updates here on X.
Later on, we’ll level it up by doing behind-the-scenes video walkthroughs showing builds in progress, code demos, subsystem tours, and some commentary on where we're heading.
5
184
19 Jul 2025
UndChain will be a digital marketplace for ideas, products, and services
2
185

30 Jun 2025
Solid backbone for real-world robotics. UndChain is solving a real need.
1
32

13 Jun 2025
🚨 Don’t throw away your old Helium IoT miners.
UndChain will give them new life as decentralized access nodes.
We’re building a next-gen network for robotics, IoT, and edge compute — and those miners are about to become useful again.
Stay tuned.
2
11
446
31 May 2025
UndChain will be an all on one platform designed for interoperability.
5
183
24 May 2025
You won't need to reinvent the wheel on UndChain...
4
170
22 May 2025
Other blockchains offer partial solutions.
UndChain gives you the whole system.
Compute, storage, access, all built in.
LINK makes robotics decentralized, programmable, and unstoppable.
2
222
21 May 2025
This is our official UndChain account. Give it a like and a follow 😀
11
271
20 May 2025
The team is working hard behind the scenes to make UndChain as successful as it can be.
We’re not just building some kind of infrastructure, we’re building a full stack where anyone can run cloud services, apps, and machines without needing their own chain.
All the aspects that other blockchains offer individually, we deliver in one place.
And instead of waiting for developers to show up, we’re launching base co-chains ourselves. Real apps, real users, real performance. Just like the early days of the App Store, proof that the system works before we ask anyone to build on it.

1
5
180
14 May 2025
Meet UndChain — a new kind of blockchain.
Built for decentralized cloud services: storage, compute, access — and yes, even robotics.
Modular. Scalable. Powered by Pseudo, our custom language for real-world applications.
GitHub: github.com/Undline/UndChain
6
99
13 May 2025
Robotics are, and will be, reshaping the way we work, move, and interact with the physical world.
But right now, most robotic systems are locked behind centralized clouds, proprietary software, and expensive infrastructure.
Link changes that.
It’s UndChain’s co-chain for remote robotics, a decentralized way to control machines like drones, home assistants, or farming rigs without relying on AWS, DJI, or any centralized entity.
You send a task. The robot does it. You can operate it yourself, let AI help, or use a simple game-like control view if your internet is slow. And just like everything on UndChain, every action is recorded directly on-chain.
To get these features in Web2? You’d have to mix Amazon’s RoboMaker, Boston Dynamics, DJI’s drones, and Open Robotics, and you still wouldn’t fully own or
control anything.
Link replaces all of that with blockchain-native control, AR guidance, Mimic’s AI supervision, and real rewards for real-world impact.
This is robotics for Web4. Powered by UndChain.

4
177