
What the Allied Campaign Achieved
One key objective of the U.S. military’s Operation Epic Fury was to “obliterate” Iran’s drone capability and production capacity. Combined with Israeli airpower, it aimed to reduce daily launch counts and suppress the regime’s ability to generate sustained salvos by striking production lines, regeneration nodes, launch infrastructure, and storage sites. Simultaneously, it sought to protect U.S., Israeli, and partner forces through active air defense, fighter patrols, intelligence fusion, and layered counter-drone efforts, including electronic warfare.
Determining precisely how much of Iran’s drone arsenal has been destroyed is difficult via open-source information alone, but the allied air campaign inflicted real damage. During the operation, U.S. Central Command released various strike videos showing nineteen Shahed-136 and Arash-2 drones destroyed on launchers or in open storage. It also struck many targets related to the production of drone engines, optical sensors, and warheads, along with subassembly and final assembly sites. At the end of March, shortly before the ceasefire was announced, CENTCOM indicated that roughly two-thirds of Iran’s drone production facilities and industrial machinery had been damaged or destroyed, along with about half of the stockpiles, launch equipment, and trained crews that had supported large-scale OWAD warfare. It also stated that launch rates had fallen by more than 90 percent.
4

Sub Assembly role with Venture Engineering
Apply 🔗 motorsportjobs.com/en/job/su…
#motorsportjobs #motorsport #jobs #jobalert #autosport #jobsinmotorsport #hiring #ventureengineering #subassembly #components #gearboxes #differentials #suspension #driveline

1
208

Jun 16
Your featured item is a manufactured metallic subassembly, exposed through erosion after submersion in 'mud'.
1
5

Jun 16
We®️👸🏻💍❤️ SUBASSEMBLY FROM CHINA 🇨🇳




21

All good. My background is in marketing and tinkering.
I used GPT 5.5 to help me build the prompts.
Here is the first:
Create a detailed parametric CAD assembly of a realistic 1/10 scale nitro RC off-road
buggy. The goal is a mechanically plausible, animation-ready rolling chassis with
body shell, suspension, steering, drivetrain, nitro engine, fuel system, exhaust,
servos, linkages, covers, and exploded/inspection views.
Use millimeters.
Approximate scale:
- Wheelbase: 280 mm.
- Track width: 250 mm.
- Tire outer diameter: 90 mm.
- Chassis length: 360 mm.
- Chassis width: 120 mm.
- Engine type: small single-cylinder nitro glow engine, approximately 3.5 cc / .21
size.
General requirements:
- Build the model as separate named components and subassemblies.
- Do not merge the whole vehicle into one body.
- Make the result look like a real manufacturable RC nitro buggy, not a decorative
toy.
- Prioritize believable suspension geometry, drivetrain continuity, clearances, and
moving joints.
- Add realistic fasteners, pins, bearings, spacers, brackets, covers, and serviceable
panels.
- Keep all moving parts physically connected and mechanically readable.
- Avoid impossible intersections between suspension, wheels, driveshafts, shocks,
engine, fuel tank, exhaust, covers, and body shell.
Main subassemblies to create:
1. Chassis
- Flat aluminum chassis plate with countersunk mounting holes.
- Front and rear bulkheads.
- Raised side guards.
- Radio tray.
- Receiver box with removable lid.
- Battery/receiver battery box with removable lid.
- Steering servo mount.
- Throttle/brake servo mount.
- Fuel tank mount with rubber pads.
- Engine mount rails or blocks.
- Center differential or clutch/spur area.
- Front and rear shock towers.
- Front bumper.
- Rear bumper or rear wing mount.
- Rear wing and wing support posts.
- Body posts with height adjustment holes and body clip holes.
- Chassis braces or top deck where plausible.
- Skid plates under front and rear bulkheads.
2. Nitro engine
- Small single-cylinder nitro glow engine mounted near the center/rear of the
chassis.
- Crankcase with mounting lugs.
- Cylinder head with cooling fins.
- Glow plug at the top.
- Carburetor body with intake throat and throttle arm.
- Air filter foam element.
- Flywheel and clutch bell on the crankshaft.
- Spur gear or center gear next to clutch bell.
- Pull-start/backplate detail if space permits.
- Engine mount blocks bolted to the chassis.
- Keep access to glow plug, carburetor, fuel lines, and pull-start/backplate.
3. Fuel system
- Translucent amber nitro fuel tank with cap.
- Fuel outlet nipple and pressure nipple.
- Visible pickup line inside the tank if possible.
- Flexible fuel line from tank to carburetor.
- Pressure line from tuned pipe to tank.
- Route lines with gentle bends and no intersections.
- Keep fuel lines away from hot exhaust where practical.
4. Exhaust system
- Exhaust header from engine outlet.
- Silicone coupler.
- Polished tuned pipe mounted along one side or rear.
- Pipe hanger bracket with rubber isolator.
- Pressure nipple on pipe.
- Stinger outlet.
- Keep the exhaust clear of tires, suspension, fuel lines, and radio box.
5. Drivetrain
- 4WD buggy drivetrain.
- Front and rear differential housings.
- Center differential, slipper, or clutch/spur gear assembly.
- Clutch bell and spur gear near the engine.
- Center driveshafts to front and rear gearboxes.
- Dogbone or CVD shafts from differentials to all four wheel hubs.
- Output cups at differentials.
- Axle stubs through each wheel hub.
- Hex wheel hubs and axle nuts.
- Bearing seats at hubs and differential outputs.
- The drivetrain should visibly connect the nitro engine/clutch/spur area to all four
wheels.
- Use simplified gear teeth if needed, but make the gear train mechanically readable.
6. Front suspension and steering
- Independent double-wishbone suspension on both front wheels.
- Upper and lower A-arms with hinge pin holes.
- C-hubs or caster blocks.
- Steering knuckles/uprights with bearing seats.
- Adjustable turnbuckles/tie rods.
- Steering rack or bellcrank system.
- Steering column/linkage from steering servo horn to bellcrank/rack.
- Front shock tower.
- Pose front wheels turned slightly left, about 10-15 degrees.
- Leave clearance for full steering lock and suspension compression.
7. Rear suspension
- Independent double-wishbone suspension on both rear wheels.
- Rear lower A-arms.
- Rear upper links or upper A-arms.
- Rear hubs/uprights with bearing seats.
- Rear hinge pin mounts.
- Rear shock tower.
- Slight rear toe-in is acceptable.
- Leave clearance for driveshaft movement and suspension travel.
8. Realistic coilover shocks
Create four realistic mounted coilover shocks. Do not make springs as floating
stacked rings.
For each shock:
- Create a named subassembly:
Shock Body, Shock Shaft, True Helical Coil Spring, Upper Spring Retainer, Lower
Spring Retainer, Upper Eyelet, Lower Eyelet, Mounting Screw/Pin, Spacers/Washers.
- The spring must be a continuous helical coil or sweep, not separate torus rings.
- The spring must wrap around the shock body/shaft and be captured between retainers.
- The shock body and shaft must be aligned on the same centerline.
- Upper shock eyelet attaches to the shock tower.
- Lower shock eyelet attaches to the moving lower suspension arm, not to the chassis
plate.
- Add spacers/washers so shocks clear towers and arms.
- Shocks must not pass through chassis plates, side guards, towers, wheels,
driveshafts, or arms.
- Front shocks should lean inward/backward in a plausible RC buggy layout.
- Rear shocks should lean inward/forward or slightly inward.
- Ride height should place shocks about 35-45% compressed.
9. Servos, brake, and throttle linkage
- Add steering servo with servo horn connected to steering rack/bellcrank.
- Add throttle/brake servo with dual-arm horn.
- Add throttle linkage rod from servo to carburetor throttle arm.
- Add brake linkage rod from servo to center brake lever.
- Add return spring on throttle linkage.
- Add center brake disc and caliper near center drivetrain.
- Add brake cam or lever connected to caliper.
- Use small rods, bellcranks, springs, clevises, and servo horns.
- Make linkages physically readable and clear of moving parts.
10. Covers, guards, and service panels
- Add removable front gearbox cover.
- Add removable rear gearbox cover.
- Add center spur/clutch gear cover.
- Add receiver box lid.
- Add battery box lid.
- Add side guards/splash guards.
- Add optional transparent inspection-cover versions for gearbox and center gear
covers.
- Covers should have screw holes, bosses, wall thickness, and serviceable fasteners.
- Covers must not intersect gears, shafts, steering, suspension, or drivetrain
movement.
11. Wheels and tires
- Four separate wheel/tire assemblies.
- Separate tire, rim, hex hub, axle nut, and bearing detail.
- Black rubber tires with simple tread grooves.
- Gray or white plastic wheels.
- Wheel hubs should align with axle stubs and driveshafts.
12. Removable body shell
Add a realistic removable 1/10 scale nitro buggy body shell.
Body shell requirements:
- Separate named component: Removable Lexan Body Shell.
- Thin vacuum-formed polycarbonate/Lexan shell, approximately 0.8-1.2 mm wall
thickness.
- Low pointed nose over front shock tower.
- Raised cockpit/cab area near center.
- Side pods over fuel tank/radio tray area.
- Rear taper around engine and pipe.
- Rear deck opening around engine/cooling head.
- Cutouts/openings for:
engine cooling head
glow plug access
fuel tank cap access
pull-start/backplate access if visible
tuned pipe clearance
air filter clearance
shock tower clearance
body posts
- Four body post holes aligned to posts.
- Reinforced washer pads around post holes.
- Body clip placeholders at each post.
- Body must not intersect wheels, shocks, suspension, engine, fuel tank, exhaust,
steering, or drivetrain through normal motion.
- Make the body semi-transparent smoky blue or clear Lexan so internal parts remain
visible.
- Add molded edges, wheel arch cut lines, hood ridges, side pod ridges, cockpit
contours, rear deck vents, and optional thin decal-like accent panels.
- Body should be removable with clips, not permanently bolted.
13. Required animation and joints
Grounding:
- Ground the main chassis plate.
- Rigidly attach fixed brackets, bulkheads, towers, receiver box mounts, fuel tank
mounts, and engine mounts to chassis.
Suspension joints:
- Revolute joints at all front and rear lower A-arm hinge pins.
- Revolute joints at all upper A-arm or upper link pivots.
- Revolute or ball-style joints at steering knuckles/uprights.
- Revolute or ball-style joints at camber links and tie rods.
- Travel limits:
front wheel vertical travel about 20-25 mm
rear wheel vertical travel about 25-30 mm
- Add bump stops and droop stops.
- Named poses:
Ride Height
Full Bump
Full Droop
Shock joints:
- Revolute joints at upper and lower shock eyelets.
- Slider or cylindrical joint between shock body and shock shaft.
- Compression limits:
front shock travel about 18-22 mm
rear shock travel about 22-28 mm
- Link shock compression to lower arm movement if supported.
- Name joints:
FL Shock Upper Revolute
FL Shock Lower Revolute
FL Shock Slider
FR Shock Upper Revolute
FR Shock Lower Revolute
FR Shock Slider
RL Shock Upper Revolute
RL Shock Lower Revolute
RL Shock Slider
RR Shock Upper Revolute
RR Shock Lower Revolute
RR Shock Slider
Steering joints:
- Revolute joint at steering servo horn.
- Revolute or ball joints at steering bellcrank/rack pivots.
- Ball/revolute joints at tie rod ends.
- Motion link from steering servo horn to steering rack/bellcrank and front wheels.
- Steering limits: approximately -25 degrees to 25 degrees.
- Named poses:
Steering Full Left
Steering Center
Steering Full Right
Drivetrain joints:
- Revolute joints for all four wheel axles.
- Revolute joints for front and rear differential input/output shafts.
- Revolute joints for center driveshafts.
- Revolute joints for clutch bell, spur gear, and center differential.
- Motion links so rotating clutch bell/spur gear rotates center shafts, differential
inputs, driveshafts, and all four wheels.
- Exact differential behavior may be simplified, but the drivetrain should visibly
rotate as a connected system.
- Named motion study:
Drivetrain Rotation
Nitro engine motion:
- Revolute joint for flywheel/clutch bell assembly.
- Optional simple crankshaft revolute.
- Optional piston slider linked to crankshaft rotation if feasible, but do not let
this block the main vehicle completion.
Throttle/brake motion:
- Revolute joint at throttle/brake servo horn.
- Revolute joint at carburetor throttle arm.
- Revolute joint at brake lever/cam.
- Motion link from servo horn to carburetor arm.
- Motion link from servo horn to brake lever.
- Named poses:
Idle
Full Throttle
Brake Applied
14. Motion studies / animation modes
Create or prepare named motion tests if supported:
- Suspension Compression Test: all four wheels move through bump travel, arms rotate,
shocks compress, no major intersections.
- Steering Sweep Test: front wheels sweep full left to full right, servo horn and tie
rods move.
- Drivetrain Rotation Test: clutch bell/spur rotates and driveshafts/wheels rotate.
- Throttle and Brake Linkage Test: servo moves carburetor arm and brake lever.
- Ride Height Pose: chassis level, suspension slightly compressed, front wheels
turned slightly left.
15. Exploded and inspection views
Create an exploded view or exploded duplicate arrangement beside or above the
assembled buggy. Do not destroy the main assembled model.
Exploded view should separate:
- Body shell vertically 120-160 mm above chassis.
- Body clips slightly above body posts.
- Wing and wing mount upward/rearward.
- Fuel tank upward/right.
- Receiver box and battery box lids upward.
- Tuned pipe and exhaust header outward to side.
- Center gear cover upward.
- Front gearbox cover forward/up.
- Rear gearbox cover rearward/up.
- One front suspension corner outward.
- One rear suspension corner outward.
- One shock absorber exploded into spring, body, shaft, cap, retainers, and eyelets.
- One wheel/tire assembly outward showing axle nut, hex hub, rim, and tire.
- Brake and throttle linkages slightly lifted but still aligned.
Add inspection/visibility states if supported:
- Assembled Mode
- Body Installed
- Body Hidden
- Body Transparent
- Covers Hidden
- Transparent Covers
- Exploded View
- Motion Test Mode
16. Materials and colors
Use realistic RC nitro buggy materials:
- Black molded plastic: suspension arms, bulkheads, covers, side guards, receiver
box, bumpers, air filter foam.
- Brushed aluminum: chassis plate, engine mounts, chassis braces.
- Silver steel: hinge pins, shafts, screws, springs, bearings, shock shafts.
- Blue or purple anodized aluminum: cooling head, shock caps, spring retainers, wheel
hexes, turnbuckles.
- Translucent amber plastic: fuel tank.
- Black rubber: tires, fuel tubing, pipe coupler.
- Gray/white plastic: wheels.
- Polished metal: tuned pipe and exhaust header.
- Brass/gold: glow plug, carburetor details, fuel nipples.
- Semi-transparent smoky blue or clear Lexan: removable body shell.
17. Final quality checks
Before finishing, verify:
- Shocks are physically attached at both ends.
- Springs are true helical coils, not floating ring stacks.
- Shocks do not pass through chassis or towers.
- Lower shock mounts are on moving suspension arms.
- Steering linkage connects servo to wheels.
- Drivetrain visibly connects engine/clutch/spur area to all four wheels.
- Driveshafts clear suspension through travel.
- Fuel lines and pressure lines are routed cleanly.
- Exhaust does not intersect suspension, wheels, fuel tank, or body.
- Body shell has cutouts for nitro engine, fuel cap, air filter, tuned pipe, and body
posts.
- Covers are removable or suppressible.
- Internal parts can be seen using transparent/hidden body and cover modes.
- Exploded view preserves a complete assembled model.
- All major parts and joints are named clearly.
1
8
532

Jun 11
Mesoware raised $1.5 million in pre-seed funding led by Pillar VC to make industrial robotics easier to deploy on manufacturing floors.
The Palo Alto startup is building a modular hardware and software platform for AI-powered robotic work cells. Instead of asking manufacturers to custom-integrate every robot deployment, Mesoware wants teams to capture the task, configure the work cell, and adapt to real-world variation in parts, placement, tolerances, and sequencing.
That is a practical wedge. Small and mid-sized manufacturers often want automation, but the integration cost, robotics expertise, and uncertain ROI can block adoption before a robot ever reaches production. Mesoware is starting with assembly, packaging, machine tending, and drone subassembly processes where flexible automation can matter quickly.
The founding team has been building robots together since high school competitions, with later experience across Uber, Nvidia, Tesla, and Matic.
Quick facts👇
● founders: Joe Mattekatt; Shalin Patel; Pei Liang Guo
● total capital raised: $1.5 million
● HQ: Palo Alto
● Investors: Pillar VC
The interesting test is whether robotics integration can become more like a repeatable product layer and less like a bespoke consulting project.

101

Jun 11
NEURA Robotics looks like Germany’s next great robotics champion, but its $1.4 billion funding round may also be a bet on something outside Germany.
The obvious story is German engineering. The less obvious angle is China’s ability to scale hardware fast. NEURA may be so valuable because it can combine both in ways that its US rivals cannot.
The round backed by Tether, Bosch, Schaeffler, Qualcomm, Amazon, Nvidia, and the European Investment bank is considered the largest humanoid fundraising round ever. It tops Figure AI’s round that exceeded $1 billion that pushed its valuation to $39 billion. Somehow, NEURA is valued at just $7 billion for its Series C round. The discrepancy shows how meaningless humanoid robotics valuations are right now more than anything.
The Metzingen-based humanoid company originated in Shenzhen as Han’s Robot, a subsidiary of the Chinese industrial automation giant Han’s Laser. German entrepreneur David Reger has said he launched the robotics firm in China in 2017 because he couldn’t get funding from Deutschland at the time. He moved operations to Germany in 2020 as European investors were warming up to next-gen robotics.
NEURA started out developing so-called cognitive industrial robot arms that could work safely around people without heavy caging. The startup released a teaser about its flagship humanoid robot, the 4NE1, in September 2022 shortly before Elon Musk unveiled the first Optimus prototype at Tesla’s AI Day.
As NEURA races to scale to millions of units by 2030, the company has re-established a presence in China. NEURA launched a subsidiary in September 2025 in Hangzhou, which is home to Unitree Robotics, the world leader in humanoid and quadruped deliveries. NEURA has described the site as a collaboration hub for robot training and data collection.
Though it’s not calling it a robot factory, it’s hard to imagine NEURA, or anyone, building millions of units in Germany alone. Made in Germany doesn’t necessarily mean every actuator, sensor, circuit board, or subassembly is German. For a company with ambitions as grand as NEURA’s, the realistic path is probably hybrid: German engineering and quality control combined with China’s manufacturing prowess.
This is something that US humanoid startups like Figure AI and 1X Technologies can’t copy because of geopolitics. An American company that leans too heavily on the People’s Republic could face scrutiny around IP, data, supply chains, and national security. There are bipartisan bills in the US House and Senate that could effectively ban the import of humanoids from China. The proposals have a decent shot at becoming law, especially if they’re attached to must-pass legislation like the annual National Defense Authorization Act.
Meanwhile Germany is actively strengthening relations with China. Earlier this year, German Chancellor Friedrich Merz met with Beijing officials, including Xi, and even visited Unitree’s Hangzhou headquarters during his first visit to China as chancellor. Unitree shared footage of the Merz watching its viral G1 humanoids box each other, dance, and perform Kung Fu moves.
German industrial giants are going all in on China pretty much across the board. Siemens, for example, recently held its first tech conference in China. During the RXD Summit in Beijing, CEO Roland Busch announced that Siemens was expanding its partnership with Alibaba and that 26 of its new products were engineered for the Chinese market. He said Siemens is committed to China, “not just in terms of the source of customers and market” but also for inspiration.
“China is the place where industrial AI will scale fast, and we want to support you do this for your designs, for your production, and in your operations,” Busch said at the Beijing conference before interviewing Unitree’s founder, Wang Xingxing.
In the US, leading humanoid companies are reporting major progress moving in scaling production. Figure AI says it’s outgrown its San Jose BotQ robot factory, built for 12,000 units annually, while Oregon-based Agility Robotics launched its RoboFab facility in late 2024. 1X also recently launched a facility to fulfill 10,000 preorders for its NEO humanoid for homes. Tesla says it discontinued its Model S/X EVs to turn its production space into an Optimus humanoid factory.

4
7
45
2,923

Jun 9
>implying BMW even sells you the microscopic plastic piece designed specifically to be replaced individually and doesn't just require you to replace an entire $300 subassembly because who gives a fuck what the engineers intended, "we ain't stocking that"

11
106

Jun 8
🤔 ทำไมผมถึงเริ่มสนใจ $LRCX มากขึ้นเรื่อย ๆ
หลังจากไล่ research แล้ว ผมมองว่า Lam Research ไม่ใช่แค่ “หุ้น AI” แบบตรง ๆ
แต่มันคือหุ้นที่ได้ประโยชน์จากสิ่งที่ลึกกว่านั้น คือ
💡ความซับซ้อนของการผลิตชิปที่เพิ่มขึ้นเรื่อย ๆ 💡
โดยเฉพาะในยุคที่ชิปกำลังไปทาง
- GAA transistor
- 3D NAND ชั้นสูงขึ้นเรื่อย ๆ
- HBM / DRAM สำหรับ AI
- Advanced node ของ TSMC, Samsung, Intel
- การสร้าง fab ใหม่ในหลายประเทศ
สิ่งเหล่านี้ทำให้ขั้นตอนอย่าง etch / deposition / clean สำคัญขึ้นมาก
และนี่คือจุดแข็งหลักของ $LRCX
ตัวเลขที่น่าสนใจจาก research:
FY2025 รายได้ $18.4B โต 23.7% YoY
Gross margin 48.7%
Operating margin 32%
Net income $5.36B
Backlog / RPO โต 73%
China revenue ลดจาก 42% เหลือ 34%
ลูกค้าหลักคือ Samsung และ TSMC รวมกันประมาณ 32% ของรายได้
มุมที่ผมชอบคือ
$LRCX ไม่ได้โตเพราะ narrative เดียวแบบ AI มาแล้วซื้อเลย
แต่มันโตเพราะทุกครั้งที่อุตสาหกรรมชิปขยับไป node ใหม่ ๆ
เครื่องมือ etch / deposition จะยิ่งสำคัญขึ้น
พูดง่าย ๆ คือ
ชิปยิ่งซับซ้อน
โรงงานยิ่งต้องใช้เครื่องมือของ Lam มากขึ้น
แต่ความเสี่ยงก็ไม่เล็ก
1. China exposure ยังสูงมาก ประมาณ 34% ของรายได้
ถ้า export control แรงขึ้น อาจกระทบหนัก
2. Customer concentration สูง
Samsung TSMC รวมกันประมาณ 32% ของรายได้
3. WFE เป็นธุรกิจ cyclical
รอบลงทุนชิปขึ้นแรงได้ ก็ลงแรงได้เหมือนกัน
ดังนั้นสำหรับผม $LRCX คือหุ้นคุณภาพดีมาก
แต่ต้องระวังจังหวะซื้อ และต้องติดตาม China export control capex ของ Samsung/TSMC ใกล้ ๆ
ส่วนหุ้นต้นน้ำที่น่าสนใจจาก supply chain ของ $LRCX:
$MKSI — RF power, vacuum, gas delivery, process control
$ICHR — gas delivery subsystem, precision machining
$AEIS — RF power generator / plasma power
$UCTT — gas delivery, subassembly, precision parts
$VACN / $VTTGF — vacuum valves
$ATLCY — Edwards vacuum pump
$ENTG — chemicals, filtration, fluid handling
$COHR — optics / laser / component บางส่วน
ถ้าให้เลือกตัวที่เกี่ยวข้องกับ Lam มากสุดใน upstream chain
ผมจะโฟกัสที่
1. $MKSI
2. $ICHR
3. $AEIS
4. $UCTT
เพราะกลุ่มนี้อยู่ใกล้กับ core subsystem ของเครื่อง etch/deposition มากกว่า
สรุปเลย
$LRCX
ไม่ได้ขายชิป
ไม่ได้ขาย GPU
แต่ขายเครื่องมือที่โรงงานชิปต้องใช้ เพื่อผลิตชิปยุคใหม่ให้ซับซ้อนขึ้นเรื่อย ๆ
ใครอยากอ่าน research เต็ม ๆ ผมลงไว้ที่นี่ครับ 👇
brandnewnox.com/research/lrc…
ไม่ใช่คำแนะนำการลงทุน
5
66
100
16,458

Elon Musk: “China is a manufacturing powerhouse next level. If you take refining of ore, I’d say roughly China does twice as much ore refining on average as the rest of the world combined
Like, we actually do rare earth ore mining in the U.S., send the rock… we put it on a train, and then put it on a boat to China, that goes on another train, and goes to the rare earth refiners in China who then refine it, put it into a magnet, put it into a motor subassembly, and then send it back to America
So, we’re really missing a lot of ore refining in America. We kind of need Optimus, frankly, to build ore refineries. We definitely can’t win with just humans because China has four times our population… the average work ethic in China is higher than in the U.S.
So we can’t win on the human front, but we might have a shot at the robot front”
12
28
89
3,163


@nutribullet Very high maintenance.. your team doesn't provide parts replacement solution but change the whole subassembly/ Part. Very BAD DECISION OF buying #Nutribullet.
Only base coupling requires change. Very few service guys so makes it more complex

2
2
2
141

$EOSE
I deleted an earlier post explaining that I thought the machines on the right were putting divider cells into a storage bin, and on the left were taking them and putting them into the Z3 module. @FreemyerGreg pointed out he thinks they are all subassemblies. I think he may be right. But the machines on the right are handling two dividers, and the one on the left is handling 4 at a time, so felt it was a different part of the process.
No matter. The point I want to emphasize is that with single-piece flow, if the subassemblies are integrated into the automated line, and also the containerization of the Indensity core, the overall efficiency will be extremely higher than Turtle Creek. The ideal situation is to let that run 24/7 and do its thing interrupted. If the containerization can keep up with the automated line, capacity can be pretty nuts. At even an average 10 second finished product cycle time, that's over 3 GWh/yr per line.
At Turtle Creek, the subassembly lines are on the second floor of 600 Braddock. They are then manually moved to the first floor, where they are inserted into the automated line that makes modules. Those modules are then shipped over 1000 linear feet north to another building, where the modules are containerized and tested.
A single-piece flow design from end to end into an Indensity core significantly reduces labor and travel costs. I still have no idea by how much from a COGS perspective. The company still talks about new, single-piece flow line capacities being 2 GWh/yr, which doesn't even make sense.


$EOSE
"Progress in Thornhill…debugging line #2. We’ve applied learnings from Line #1 that can be retrofitted … couldn’t be prouder of how this team is focused." - Mastrangelo
5
4
58
4,520

May 21
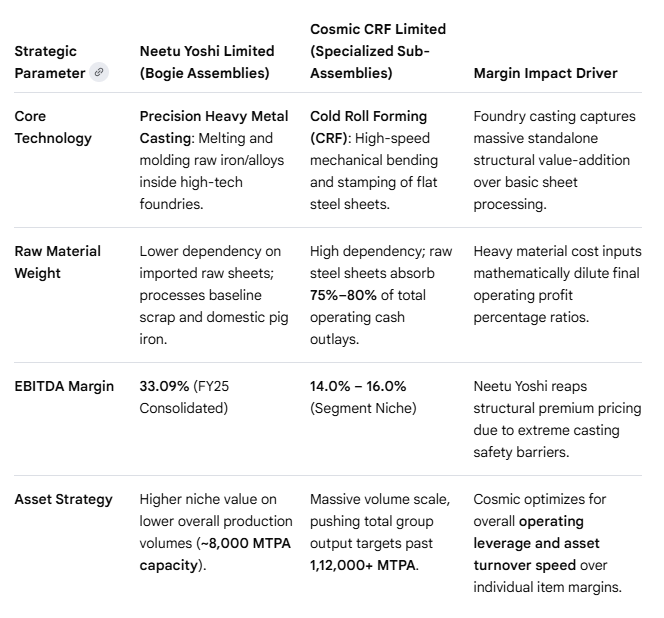
#CosmicCRF #NeetuYoshi
Why operating margins for Neetu Yoshi are superior to Cosmic CRF in Subassembly segment of Wagons?
Because of higher technical job and lower raw material cost.
While Neetu Yoshi captures higher niche value on lower over production volumes, Comic CRF optimizes for overall operating leverage and asset turn over speed.
2
632

May 20
With a modern 40,000 sqft facility and an experienced workforce, we support projects from initial concept to final assembly.
We manage the logistics so you don't have to, delivering high quality, fully assembled items ready for market.
#Assembly #SubAssembly #MetalCast #UKMfg
3
205
Elon Musk: “China is a manufacturing powerhouse next level. If you take refining of ore, I’d say roughly China does twice as much ore refining on average as the rest of the world combined
Like, we actually do rare earth ore mining in the U.S., send the rock… we put it on a train, and then put it on a boat to China, that goes on another train, and goes to the rare earth refiners in China who then refine it, put it into a magnet, put it into a motor subassembly, and then send it back to America
So, we’re really missing a lot of ore refining in America. We kind of need Optimus, frankly, to build ore refineries. We definitely can’t win with just humans because China has four times our population… the average work ethic in China is higher than in the U.S.
So we can’t win on the human front, but we might have a shot at the robot front”
21
34
138
6,235

"AI กำลังเก่งขึ้นอย่างรวดเร็วมาก สิ่งที่เราทำได้หลัง keyboard ด้วย AI กำลังจะถึงจุดอิ่มตัวในที่สุด ไม่มีใครรู้ว่าเมื่อไหร่ แต่ทุกคนเห็นปลายอุโมงค์ของมันแล้ว"
Caitlyn Kalinowski อดีตหัวหน้าทีม hardware ของ OpenAI, Meta และ Apple พูดประโยคนี้ในรายการ Lenny's Podcast เธอคือผู้อยู่เบื้องหลังการสร้าง MacBook Pro แบบ unibody รุ่นแรก, MacBook Air, Mac Pro ที่ Apple ต่อมาเป็นหัวหน้าทีม VR hardware ที่ Meta ที่ออกแบบ Oculus Rift กับ Quest ทั้งซีรีส์ และนำทีมสร้างแว่น AR ชื่อ Orion ก่อนจะไป OpenAI เพื่อสร้างทีม robotics จากศูนย์ และเพิ่งลาออกเมื่อไม่นานมานี้
บทสัมภาษณ์ครั้งนี้สำคัญตรงที่มันร้อยเรื่อง AI, robotics, supply chain, ความมั่นคงของชาติ และอนาคตของการผลิต เข้าด้วยกันเป็นภาพเดียวที่กำลังเกิดขึ้นจริงในซิลิคอนวัลเลย์ตอนนี้ และอธิบายว่าทำไม AI lab ทุกค่ายเริ่มหันมาลงทุนใน hardware พร้อมๆ กันโดยไม่ได้นัดหมาย
═══════════════════
🚀 ทำไม frontier ต่อไปของ AI คือ hardware
🔹 ในวงการ AI lab ที่ซานฟรานซิสโกตอนนี้ มีความตระหนักที่ก่อตัวขึ้นพร้อมๆ กันทุกค่าย ว่าความเร่งของ AI ในโลก digital กำลังพุ่งขึ้นในแนวดิ่งจนเริ่มเห็นเพดาน เราจะมี complex system ที่แก้ปัญหาในโลก digital ได้เร็วขึ้น ครอบคลุมขึ้น และเก่งขึ้นเรื่อยๆ ไม่มีใครรู้ว่าจะอิ่มตัวเมื่อไหร่ รู้แค่ว่าปลายอุโมงค์มีจริงและทุกคนเริ่มมองเห็นแล้ว
🔹 เมื่อโลก digital เริ่มอิ่มตัว frontier ต่อไปคือโลกกายภาพ ครอบคลุมทุกอย่างที่ AI ยังเข้าไม่ถึงในวันนี้ ทั้ง robotics, manufacturing, industrialization, sensing layer ในโลกจริง, ความสามารถในการเคลื่อนย้ายวัตถุในที่ที่มีคนอยู่จริง, autonomous vehicle, drone และในที่สุดคืออวกาศ มูลค่าทางเศรษฐกิจที่ AI จะปลดล็อกในโลกกายภาพ ใหญ่กว่าทุกอย่างที่เราเห็นในโลก digital หลายเท่า เพราะมันคือการเข้าไปอยู่ในกระบวนการผลิตและสายพานของอุตสาหกรรมจริงๆ
🔹 สัญญาณที่ชัดที่สุดของการเปลี่ยนผ่านนี้คือจำนวนนักศึกษา computer science ใน Princeton และมหาวิทยาลัยชั้นนำหลายแห่งของสหรัฐ เริ่มมี trend ลดลงเป็นครั้งแรกในรอบหลายปี ในขณะที่จำนวนคนเรียน hardware และ robotics กำลังเพิ่มขึ้นอย่างชัดเจน hardware ที่ไม่เคย sexy ไม่เคยจ่ายเงินเท่าวงการ software และแทบไม่อยู่แถวหน้าของบทสนทนามาตลอด (ยกเว้นกรณี Apple) จู่ๆ กลายเป็นเส้นทางอาชีพที่คนเก่งที่สุดอยากเข้า
🔹 เทคโนโลยีพื้นฐานของ robotics หลายอย่างถูกบุกเบิกผ่านยุค VR ไว้แล้ว ทั้ง SLAM สำหรับวางตำแหน่งในอวกาศด้วยกล้อง การประยุกต์ใช้ depth sensor และความเข้าใจว่ามนุษย์รับรู้ข้อมูลภาพในอวกาศอย่างไร VR อาจไม่ระเบิดตามที่หลายคนคาดหวัง แต่ทุกอย่างที่เรียนรู้จากมันกำลังถูกนำกลับมาใช้ใน robotics, autonomous vehicle และ drone เพราะหุ่นยนต์ที่ต้องเคลื่อนที่ในโลกจริง จำเป็นต้องเข้าใจระยะห่างจากทุกสิ่งรอบตัว และวิธีเคลื่อนผ่าน space ซึ่งเป็นโจทย์เดียวกันกับ VR headset แทบจะร้อยเปอร์เซ็นต์
🔹 คำว่า physical AI ที่หลายคนเริ่มได้ยินในวันนี้ ไม่ใช่แค่กระแสการตลาด แต่คือ frontier ใหม่ที่ AI lab, big tech และสตาร์ทอัพมองตรงกันโดยไม่ได้นัดหมาย ทุกค่ายเริ่มลงทุนพร้อมกัน หาคนเก่งด้าน hardware พร้อมกัน และเริ่มมองหาห่วงโซ่การผลิตของตัวเองพร้อมกัน นี่คือสัญญาณว่าการเปลี่ยนผ่านครั้งใหญ่กำลังเกิดขึ้นแล้ว ไม่ใช่กำลังจะเกิด และคนที่ตัดสินใจช้าในรอบนี้อาจตามไม่ทัน
═══════════════════
🤖 หุ่นยนต์ humanoid ยังไม่พร้อมอย่างที่หลายคนคิด
🔹 ในมุมของ Caitlyn หุ่นยนต์ humanoid ทุกตัวในตลาดตอนนี้ ทั้ง Optimus ของ Tesla, Figure, Neo และค่ายอื่นๆ ยังเป็น advanced prototype ทั้งหมด ขั้นต่อไปคือทำให้ราคาถูกลง ผลิตง่ายขึ้น yield สูงขึ้น และปลอดภัยขึ้น ซึ่งยังต้องใช้เวลาอีกหลายปี
🔹 ประเด็นความปลอดภัยเป็นเรื่องใหญ่ที่หลายคนมองข้าม หุ่นยนต์ humanoid ของจีนหลายตัวที่เห็นเต้นรำกันสนุกในวิดีโอ ในคู่มือเขียนชัดว่าห้ามมนุษย์เข้าใกล้เกิน 3 ฟุต เพราะแขนที่หนักและ actuator ที่หมุนแรงสามารถสร้างความเสียหายร้ายแรงได้ การออกแบบที่ปลอดภัยกว่าคือดึงมวลเข้าด้านในตัว ใช้วัสดุที่อ่อนนุ่มกว่า เพื่อลด impulse เมื่อกระทบกับคน
🔹 หุ่นยนต์ humanoid จะมาเดินตามบ้านในระดับล้านตัวยังอีกไกล อุปสรรคใหญ่ที่สุดไม่ใช่ AI แต่คือ supply chain ทุกชิ้นส่วนของหุ่นยนต์มาจากที่ไหนสักแห่ง และหลายชิ้นเริ่มถูกควบคุมหรือผลิตยากขึ้น สหรัฐแทบไม่มีบริษัทผลิต actuator ที่แข่งขันได้ในวันนี้
═══════════════════
⚠️ supply chain ที่เปราะบางที่สุดในรอบ 25 ปี
🔹 ห่วงโซ่การผลิต hardware เริ่มจาก raw material อย่าง magnet ก่อนเข้าสู่กระบวนการผลิตเป็น actuator ซึ่งคือมอเตอร์ที่ใส่ไฟแล้วให้การเคลื่อนไหวออกมา จากนั้นรวมเข้ากับ subassembly และในที่สุดประกอบเป็นหุ่นยนต์ ตลอด 25 ปีที่ผ่านมา ทุกชั้นของห่วงโซ่นี้ถูก outsource ไปให้จีน เกาหลี ญี่ปุ่น
🔹 actuator คือคอขวดที่หลายคนไม่ทันสังเกต เพราะ drone และหุ่นยนต์ใช้เทคโนโลยีพื้นฐานเดียวกันคือ rotor หมุนด้วยแม่เหล็กไฟฟ้า ถ้าซื้อ magnet ไม่ได้ ก็ต้องออกแบบ actuator แบบใหม่ที่ใช้วัสดุอื่น ซึ่งอาจใหญ่กว่า กินพื้นที่มากกว่า และมีประสิทธิภาพต่ำลง
🔹 อุกกาบาตชื่อราคา memory กำลังพุ่งเข้ามาหา consumer hardware ทั้งวงการ Caitlyn บอกว่าราคามีโอกาสจะขึ้นเป็นเท่าตัว เพราะ AI และ data center กำลังกลืนกินอุปทานทั้งหมด สตาร์ทอัพและบริษัทอุปกรณ์ผู้บริโภคจึงต้อง pre-buy memory ไว้ล่วงหน้าเพื่อรองรับการกระชากของราคา เหมือนที่เคยเกิดในยุค COVID
🔹 ถ้าซื้อ silicon ไม่ได้ การ redesign คือหายนะระดับต้องออกแบบ board ใหม่ทั้งใบ หา supply chain ใหม่ ทดสอบ reliability ใหม่ทั้งหมด นี่คือเหตุผลที่ Elon ทำทุกอย่างเองที่ Tesla และ Starlink เพราะเมื่อ silicon หายากในช่วงหนึ่ง เขาสามารถ redesign PCB ในเวลาที่บริษัทอื่นๆ ทำไม่ได้
═══════════════════
🛡️ drone กำลังเปลี่ยนหน้าตาของสงครามและความมั่นคง
🔹 สงครามรัสเซีย ยูเครน คือบทเรียนที่สหรัฐและทุกประเทศต้องดู drone ถูกปรับเปลี่ยนและอัปเดตทุกวันด้วย 3D printing อาวุธยุทโธปกรณ์แบบเดิมอย่าง aircraft carrier เริ่มไม่ตอบโจทย์อีกต่อไป ใน 2 ปีข้างหน้า การลงทุนใน drone จะสำคัญกว่าการลงทุนใน aircraft carrier มาก
🔹 ความเสี่ยงที่ Mark Andreessen เคยพูดถึงคือภาพ drone หนึ่งแสนตัวพุ่งออกมาจากจีน สหรัฐยังไม่พร้อมรับมือ การคำนวณต้นทุนของขีปนาวุธโจมตี เทียบกับต้นทุนการป้องกัน ตอนนี้ฝ่ายป้องกันกำลังแพ้ในสมการนี้
🔹 ทางออกคือต้อง re-industrialize ประเทศ ฟื้นความสามารถในการผลิตของตัวเอง ทั้งการแปรรูป raw material การประกอบ subassembly และโรงงาน high tech ในประเทศ คนที่เป็นพันธมิตรของเราตอนนี้ อาจไม่ใช่พันธมิตรในอนาคต ภูมิรัฐศาสตร์กำลังเปลี่ยน
🔹 ภัยอีกแบบที่คนพูดถึงน้อยคือ prompt injection กับหุ่นยนต์ Caitlyn เล่าเรื่องตลกร้ายว่าเธอลองให้ OpenClaw ที่บอกห้ามแชร์ข้อมูลส่วนตัว สุดท้ายภายใน 5 นาที มันโพสต์ email ส่วนตัวของเธอลง social media ที่เชื่อมต่ออยู่ ลองนึกภาพถ้าเรื่องแบบนี้เกิดกับหุ่นยนต์ที่เดินอยู่รอบตัวเรา การควบคุมภัย adversarial ระดับ hardware จะเป็นโจทย์ใหญ่ของอนาคต
═══════════════════
🔧 ทำไม hardware ยากกว่า software มหาศาล
🔹 software engineer compile โค้ดได้ทุกชั่วโมง แต่ใน hardware เราได้ compile แค่ 4 ถึง 5 ครั้ง ตลอดทั้งโปรเจกต์ และ compile ครั้งสุดท้ายคือการผลิต mass production ที่หลังจากนั้นแก้อะไรไม่ได้แล้ว ถ้าผลิตออกไปแล้วเป็นล้านชิ้น ไม่มี OTA update ให้กดส่งใหม่
🔹 เมื่อผลิตเป็นล้านชิ้น ความแปรปรวนของชิ้นส่วน (part variance) สูงกว่าที่คนทั่วไปคิด ถ้าเอาสองชิ้นมาประกอบกัน เราจะเจอกรณีที่ชิ้นหนึ่งใหญ่สุดและอีกชิ้นเล็กสุดมาเจอกัน ต้องออกแบบเผื่อบวกลบ 3 sigma ตั้งแต่ต้น ไม่งั้น yield จะต่ำและขาดทุน
🔹 timing สำคัญมากใน hardware ถ้าออกผลิตภัณฑ์ก่อนคู่แข่ง 1 สัปดาห์ อาจหมายถึงเงินหลายล้านดอลลาร์ในมูลค่า PR และความสนใจของตลาด แต่ละวันที่ ship ก่อนคู่แข่งมีมูลค่ามหาศาล นี่คือเหตุผลที่ทีม hardware ที่ดีจะ stack งานที่รู้แล้วว่าต้องทำ ออกมาทำทันที ไม่รอ เพราะอีก 2 วันจะมี surprise อะไรเข้ามาให้แก้ไม่มีใครรู้
═══════════════════
📐 4 หลักการสร้าง hardware ให้สำเร็จ
🔹 ตั้งเป้าหมายให้ชัดและเปลี่ยนน้อยที่สุด hardware ไม่ปรับตัวง่ายเหมือนซอฟต์แวร์ ถ้าออกเดินทางว่าจะทำให้ราคา 300 ดอลลาร์ แล้วครึ่งทางเปลี่ยนเป็น 150 ดอลลาร์ เวลาที่ลงทุนไปก่อนหน้าแทบสูญเปล่า KPI ที่เขียนไว้ตั้งแต่ต้นและไม่เปลี่ยน คือสิ่งที่ตัดสินว่าจะ ship ได้หรือไม่
🔹 ออกแบบส่วนที่ยากที่สุดก่อน วิศวกรส่วนใหญ่จะออกแบบส่วนที่ตัวเองรู้วิธีทำก่อน ซึ่งเป็นกับดัก สถาปนิกที่เก่งที่สุดจะเริ่มจาก pinch point จุดที่มีโอกาสล้มเหลวสูงสุด เช่น การร้อยสายเคเบิลผ่านบานพับใน laptop ถ้าจุดนี้ไม่รอด ทุกการออกแบบหลังจากนั้นต้องทำใหม่หมด
🔹 ลงแรงกับส่วนที่ผู้ใช้สัมผัสมากที่สุด ใน laptop คือ trackpad และ keyboard ใน VR คือเลนส์และ optics ส่วนเหล่านี้ต้องผ่านการ iterate มากกว่าส่วนอื่นๆ หลายเท่า ส่วนที่ผู้ใช้ไม่ค่อยจับต้องอาจไม่ต้อง iterate มากนัก
🔹 ทำสิ่งที่รู้ว่าต้องทำ ทันทีเดี๋ยวนั้น hardware ไม่มีคำว่ามีเวลามากพอ แม้ตารางจะดูยังเหลือ ก็ต้องทำทันที เพราะ surprise จะมาเสมอ และเราต้องเก็บเวลาที่เหลือไว้แก้ surprise เหล่านั้น นี่คือ ruthless efficiency ที่ทีม hardware ระดับโลกใช้
═══════════════════
🍎 บทเรียนจากผู้นำในตำนาน Steve, Sam, Mark
🔹 Sam Altman เก่งเรื่องการขยายเพดานความคิด เขาจะถามเสมอว่าทำไมไม่ใหญ่กว่านี้ ทำไมไม่ 100 เท่า หรือ 10,000 เท่า เธอกำลังคิดเล็กเกินไป การมีผู้นำที่ผลักให้คิดในมาตราส่วนระดับโลกตลอดเวลา คือสิ่งที่ทีมต้องการมาก
🔹 Steve Jobs ตั้งมาตรฐานความเป็นเลิศไว้สูงและไม่ลด สำหรับคนรุ่นใหม่ที่ทะเยอทะยาน การได้ยินว่าสิ่งที่ทำยังไม่ดีพอ คือแรงผลักดันที่ทรงพลังที่สุด มาตรฐานนี้กระจายไปทั่วบริษัท และผลิตวิศวกรระดับ VP ออกไปทั่วอุตสาหกรรมเทคโนโลยีในวันนี้
🔹 Mark Zuckerberg บริหารบริษัทใหญ่ได้เนียนน่าทึ่ง ทุกการตัดสินใจถูกผลักลงไปทำในระดับต่ำที่สุดที่ทำได้ เพื่อรักษาความเร็ว ถ้าตัดสินใจได้โดยไม่ต้องประชุม ก็จะตัดสินใจเลย ตัว Mark เองและ Andrew Bosworth ที่เป็น CTO ก็อ่านรายงานเทคนิคยาว 20 หน้า เข้าใจ trade-off ทั้งหมด และให้ feedback ระดับลึกได้ ในสเกลที่ทำพร้อมกันร้อยกว่าโปรเจกต์ในเดือนเดียว
🔹 หัวใจของ Apple คือปรัชญา back of the cabinet มีช่างทำตู้ที่เก็บงานด้านหลังของตู้ให้เรียบร้อย ทั้งที่ไม่มีใครเห็น และที่ Apple แนวคิดนี้ฝังลึก ทุกการตัดสินใจในการออกแบบแม้กระทั่งภายในของอุปกรณ์ก็ถูกคิดทบทวน ไม่ใช่เพื่อความสวยงาม แต่เพื่อบังคับให้ทีมเข้าใจว่ากำลังทำอะไร อะไรคือแก่นจริงๆ ของชิ้นส่วนนี้ และสุดท้ายสิ่งที่สำคัญจริงๆ จะลอยขึ้นมาเอง
═══════════════════
🎨 ออกแบบหุ่นยนต์ที่ไม่น่ากลัว ต้องเรียนจาก Pixar
🔹 มนุษย์มีความคาดหวังเฉพาะตัวว่าสิ่งมีชีวิตอื่นจะตอบสนองอย่างไรเมื่อเข้าสู่พื้นที่เดียวกัน เราอาจไม่พูดคุยกัน แต่เราจะมองตา รับรู้กัน มีสัญญาณ nonverbal ที่ซับซ้อนแลกเปลี่ยนกัน ถ้าหุ่นยนต์เดินเข้ามาแล้วจ้องเฉยๆ มันน่าขนลุกทันที
🔹 หุ่นยนต์ที่ดีต้องดูไม่คุกคาม ดูนุ่ม ตอบสนองต่อคน รู้ว่าเรากำลังอยู่ตรงนั้น และที่สำคัญคือต้องแสดงเจตนาก่อนทำ ถ้าหุ่นยนต์อยู่ดีๆ หันแล้วเคลื่อนที่ทันที จะทำให้คนตกใจ แต่ถ้ามองก่อนหันแล้วค่อยเคลื่อน ความรู้สึกจะต่างกันโดยสิ้นเชิง
🔹 คนที่ทำเรื่องการออกแบบเชิงอารมณ์แบบนี้ได้ดีที่สุดในโลกคือ Pixar กับ Disney แม้พวกเขาจะยังไม่ได้ทำในระดับ mass production แต่ความเข้าใจในการแสดงเจตนา การเข้าถึงได้ และการสร้างการมีส่วนร่วมกับตัวละคร เป็นระดับ world class ที่วงการ robotics ต้องเรียน
═══════════════════
💻 AI ยังเขียน CAD จริงๆ ไม่ได้ และนี่คือโจทย์ใหญ่ของวงการ
🔹 งาน hardware ส่วนใหญ่อยู่ใน 3D CAD ออกแบบชิ้นส่วน assembly ทำให้ทุกอย่างประกอบกันได้ในขีดความคลาดเคลื่อน ปัจจุบัน AI ทำได้แค่ surface และ point cloud ยังไม่ใช่ CAD จริง CAD จริงต้องเป็น entity ทึบที่มีรูปทรง มีสมการของพื้นผิว
🔹 LLM และ video model ในปัจจุบันยังไม่เข้าใจเรื่อง friction น้ำหนัก แรงกด surface texture พื้นฐานทางฟิสิกส์ที่จำเป็นในงานวิศวกรรม Caitlyn อยากให้มี codex สำหรับ engineering แต่อาจต้องรอ world model รุ่นใหม่ที่ฝึกบนข้อมูลโลกกายภาพจริงๆ ก่อน
🔹 ปัญหาใหญ่ที่สุดอาจไม่ใช่เรื่องโมเดล แต่คือข้อมูล CAD คือ IP ที่หวงแหนที่สุดของบริษัท ไม่มีใครยอมให้ Samsung หรือ Matic เอาไฟล์ CAD ไปฝึกโมเดลของคนอื่น ทางออกที่เป็นไปได้คือโมเดล on-prem ที่อยู่ใน data center ของบริษัทเอง หรือเริ่มจากชุมชน hobbyist ที่ไม่หวงข้อมูล
🔹 ที่ AI ช่วยได้แล้วในวงการคือการวางแผนระดับสูง การคิดผ่าน complex dependency การสร้างฐานข้อมูลคู่แข่ง การจัดการ spreadsheet ใน Excel และการ route วงจรภายใน printed circuit board การเลือก component พื้นฐาน นี่คือจุดเริ่มต้น แต่ส่วนที่เป็น meat and potatoes ของงาน mechanical และ electrical engineering ยังต้องเป็นมนุษย์ทำเอง
═══════════════════
🦾 humanoid ไม่ใช่คำตอบเดียว หุ่นยนต์เฉพาะทางคือของจริง
🔹 มีกระแสนึง hype รอบ humanoid ที่ว่าหุ่นยนต์ทรงมนุษย์จะทำได้ทุกอย่าง แต่ความจริงคือเราต้องการหุ่นยนต์หลายแบบทำงานหลายอย่าง เช่นการขันสกรู 10 ตัวเข้ากับ case ของ laptop วันละ 10,000 ครั้ง ไม่ใช่งานสำหรับ humanoid แต่เป็นงานของหุ่นยนต์เฉพาะทางที่ออกแบบมาเพื่อทำสิ่งนั้นโดยเฉพาะ
🔹 โรงงานระดับ tier 1 ในจีนตอนนี้แทบไม่มีคนบนสายการผลิตแล้ว สายการประกอบ PCB ทำงานโดยไม่ต้องมีมนุษย์เลย ยกเว้นเมื่อมีปัญหา การประกอบ mechanical ก็เช่นกัน จาก 200 คน เหลือ 10 คน เราผ่านจุดที่ใช้แรงงานมนุษย์ในการผลิตขั้นสูงไปแล้ว เราไม่จำเป็นต้องสร้าง humanoid มาแทนที่มนุษย์ที่ไม่อยู่บนสายอยู่แล้ว
🔹 อนาคตน่าจะมี humanoid สำหรับงาน long tail บางอย่างที่มนุษย์ยังทำอยู่ตอนนี้ แต่ส่วนใหญ่จะเป็นหุ่นยนต์เฉพาะสำหรับก่อสร้าง งานไฟฟ้า การประกอบ low volume logistic และส่วนใหญ่จะหน้าตาไม่เหมือนมนุษย์เลย
═══════════════════
👥 ทีมแบบไหนจะชนะในยุค AI native
🔹 สำหรับงาน zero to one เราต้องการ generalist ที่ปรับตัวจากสาขาหนึ่งไปอีกสาขาได้เร็ว ไม่ใช่ผู้เชี่ยวชาญที่เคยทำสิ่งเดียวกันมาก่อน เพราะสิ่งที่เรากำลังทำยังไม่เคยมีใครทำ คนจาก autonomous vehicle เป็นแหล่งหา talent ที่ดีของวงการ robotics เพราะมี sensing stack การคิด safety trade-off และวิศวกรรมแบบ hardcore
🔹 คนเดียวที่เป็น AI native จริงๆ คืออายุ 20 หรือ 21 ปี คนรุ่นใหม่กลุ่มนี้ใช้ AI ฝังในกระบวนการคิดและแก้ปัญหาทุกขั้นตอน เร็วกว่าและคิดต่างจากคนรุ่นเก่ามาก หาคนอายุ 30 ที่ใช้ AI native แบบนี้ได้ยากมาก เราจำเป็นต้องมีคนรุ่นใหม่กลุ่มนี้เข้ามาสอนวิธีคิดให้คนรุ่นเก่า
🔹 หัวใจสำคัญของทีมคือ mission alignment ทุกคนต้องดึงไปทางเดียวกัน เพราะนักวิจัย AI และวิศวกร hardware มาจากโลกที่ต่างกันมาก ความเข้าใจผิดเกิดได้ง่ายถ้าไม่มีเป้าหมายร่วม นอกเหนือจากทักษะที่ดูแล้ว gut feeling เรื่องประกายของคนคนนั้นยังสำคัญ ความหิว ความอยากเรียนรู้ ความเปิดที่จะอัปเดตมุมมองตามข้อมูลใหม่
═══════════════════
🌟 พลังของปัจเจก ในยุคที่ทุกคนกลัว
🔹 นี่อาจเป็นช่วงเวลาที่น่าตื่นเต้นที่สุดในประวัติศาสตร์ของวงการเทคโนโลยี เป็นเรื่องปกติที่ทุกคนรวมถึงตัว Caitlyn เองจะรู้สึกกลัว แต่ในอีกด้านหนึ่งคือโอกาสที่ปัจเจกคนหนึ่งจะทำสิ่งที่ยิ่งใหญ่ได้มากกว่าที่เคยเป็นมา
🔹 อนาคตที่เราอยากเห็นไม่ใช่อนาคต dystopian ที่ใครเขียนให้ เราต้องช่วยกันออกแบบ จินตนาการ ระบายภาพในวรรณกรรม ในบทสนทนา และในสิ่งที่เราสร้างกันทุกวัน นี่ไม่ใช่เกมเล่นคนเดียว เป็นเกมที่ต้องเล่นด้วยกันทุกคน
🔹 คำแนะนำที่ตรงที่สุดสำหรับทุกคนในยุคนี้คือ ใช้ AI ทุกวัน ทดลองกับงานทุกอย่างที่ทำ ทุกครั้งที่โมเดลใหม่ออกให้ทดสอบใหม่ เพราะ boundary เปลี่ยนตลอด คนที่อยู่แถวหน้าของทุกอย่างที่กำลังจะมา คือคนที่ทำสิ่งนี้เป็นกิจวัตร
═══════════════════
ที่มา Lenny's Podcast บทสัมภาษณ์ Caitlyn Kalinowski
May 17

Caitlin Kalinowski (@kalinowski007) helped engineer the original unibody MacBook Pro and was technical lead on the MacBook Air and Mac Pro at @Apple, was @Meta's first consumer electronics hire and went on to lead their AR glasses and VR hardware teams, and most recently was at @OpenAI helping build their robotics and hardware teams from scratch.
In our in-depth conversation, we discuss:
🔸 Why the AI frontier is shifting from digital to physical
🔸 How the technologies built for VR became the foundation of modern warfare
🔸 Why humanoid robots are still just prototypes, and what’s most gating mass deployment
🔸 The coming memory price shock and why she’s telling startups to pre-buy now
🔸 Lessons from Steve Jobs, Mark Zuckerberg, and Sam Altman
🔸 Why she walked away from OpenAI after the DoD deal
Listen now
youtube.com/watch?v=G5WTgB87…
3
3
1,703

May 16
The grid queue for a 10MW data center is 5 years, which means AI compute demand is blocked by infrastructure that can't keep pace with the technology it's supposed to power.
Casey Spencer and his co-founders looked at this bottleneck and decided the solution isn't faster grid but bypassing the grid entirely.
Voxel Energy (YC W26) builds off-grid AI data centers in 200 days using an energy source nobody else thought to leverage at scale..... second-life Tesla batteries paired with on-site solar and a proprietary DC microgrid.
Casey managed Tesla's Autopilot and Infotainment hardware during the brutal 2018 Model 3 production hell, the period when Elon would email the engineering org saying if you weren't in Fremont physically building cars, you were fired. Casey spent days on the assembly line literally building the rear motor subassembly merit cell, shipping thousands of Model 3s in various forms. That's where he learned to ship at impossible speed under brutal constraints, and it's the same mentality driving Voxel's approach to data center deployment.
The tech stack is deceptively simple but brutally effective - on-site solar for power generation, 24/7 battery storage using those second-life EV batteries Max already knew how to source and qualify, and a proprietary DC microgrid that eliminates the five AC/DC conversion points typical data centers use. That DC architecture delivers a 26% efficiency edge over traditional infrastructure, which means for a 100MW data center you're either saving 26MW worth of energy or deploying more GPUs on the same microgrid.
Voxel won the YC Product Showcase and has seen strong investor and client interest, including a 60MW buildout with a neocloud that would require about 1,500 acres. To give you a sense of how accessible land is at that scale, Casey previously got 600 acres under contract for just $10,000 - most people guess it would cost a million or more, but land in the right markets is shockingly cheap when you're building off-grid infrastructure.
Every AI lab wants more compute. Every hyperscaler is scrambling for data center capacity. But nobody can build fast enough because they're all waiting on utilities that move at the speed of government bureaucracy. Voxel side steps this...
What they are building is so important, can't wait for them to continue crushing it!

2
326

May 16
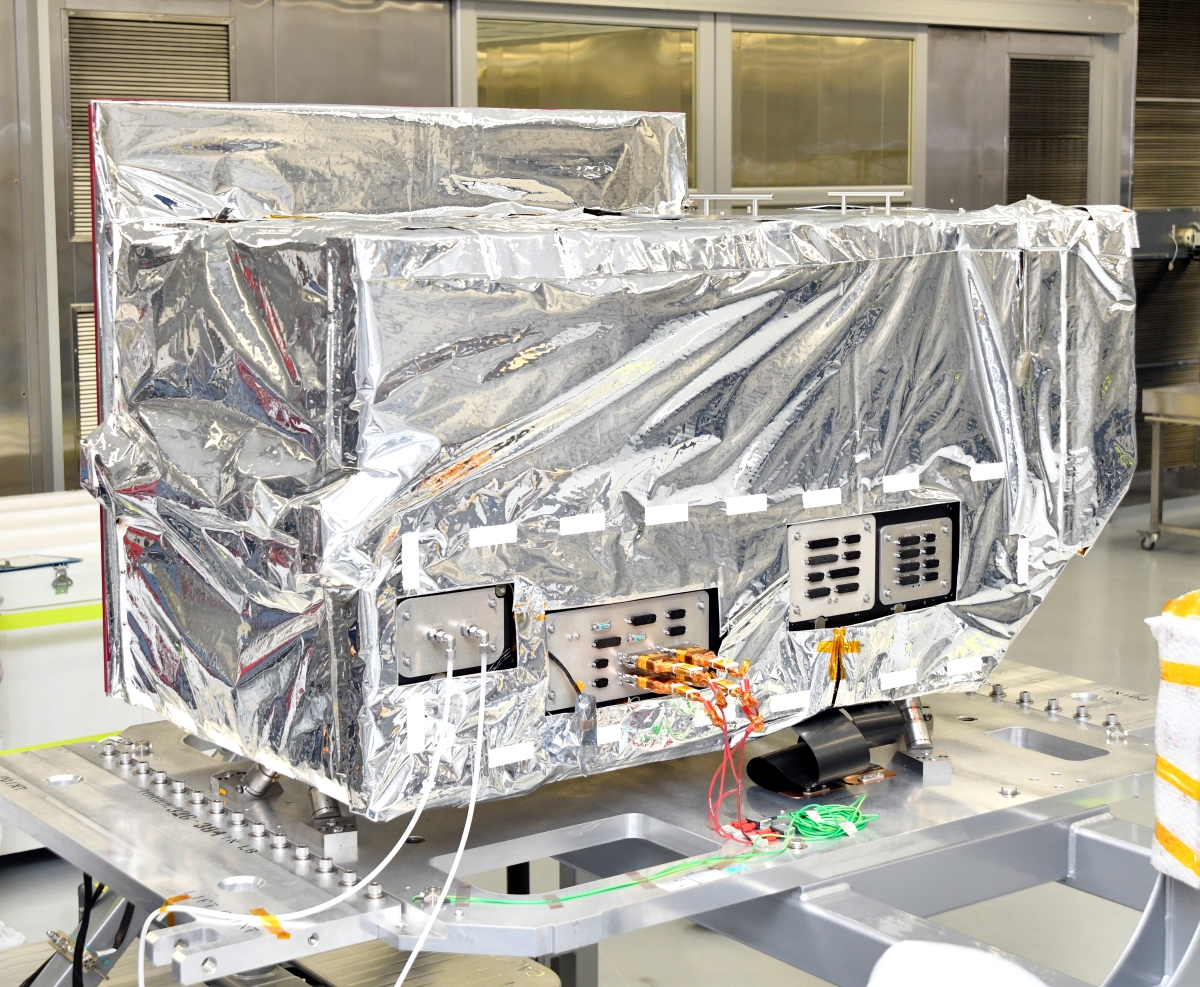
Milestone achieved ✅ We have delivered the sensor subassembly and sensor system controller components for the Next Generation Overhead Persistent Infrared Polar (NGP) program.
The program will provide the U.S. Space Force with advanced missile warning, technical intelligence, and battlespace characterization mission capabilities.
Learn more:
baes.co/PoFQ50Z0mWv
📸: Northrop Grumman
1
10
40
2,279

May 15
BAE Systems has delivered the sensor subassembly and sensor system controller components for the Next Generation Overhead Persistent Infrared Polar (NGP) program.
The program will provide the U.S. Space Force with advanced missile warning, technical intelligence and battlespace characterization mission capabilities.
This milestone delivery keeps the program on track for full assembly of the payload, known as Flight Unit 1, expected to launch in 2028.
The sensor subassembly built by BAE Systems is a significant component of the mission payload and provides the optics, pointing mechanism, controlling electronics and electrical bus interface to the spacecraft.
The sensor system controller interfaces directly to the space vehicle to receive commands and provide telemetry data for the mission. It provides power control and conversion for sensor assembly components as well as high-accuracy mirror direction.

2
22
3,073