
Jun 4
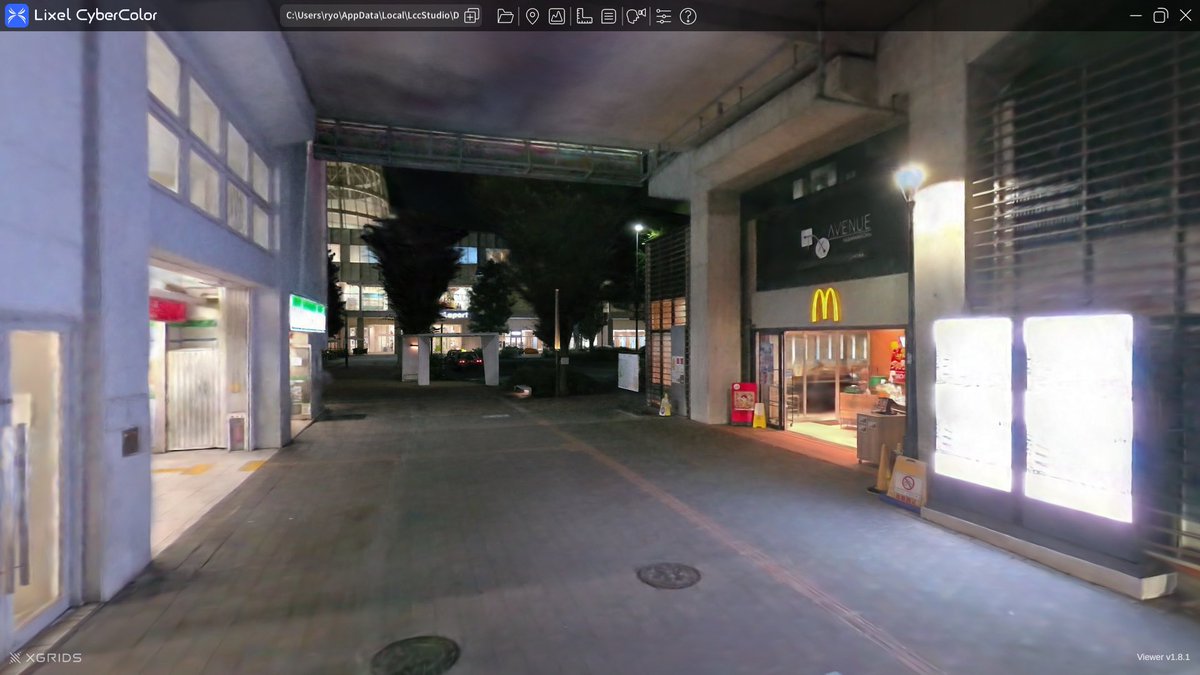
Kudan and MRDVS announce a new collaboration! Integrating KdVisual into smart sensor modules to deliver real-time, on-module localization for robots and industrial fleets.
kudan.io/?p=3422
#Robotics #VisualSLAM #PhysicalAI
1
8
1,053
Jun 4
KudanのVisual SLAM「KdVisual」とMRDVSのスマートセンサーモジュールの協業を開始しました!屋内・屋外を問わず、ロボットや産業用フリートのリアルタイム自己位置推定をオンモジュールで実現していきます。kudan.io/jp/archives/5066 #ロボティクス #VisualSLAM #フィジカルAI
11
1,331

Apr 13
📢 #highlycited paper
📚 Comprehensive Performance Evaluation between #VisualSLAM and #LiDAR SLAM for Mobile Robots: Theories and Experiments
🔗 mdpi.com/2076-3417/14/9/3945
👨🔬 by Yu-Lin Zhao et al.
🏫 National Taiwan University
#3Dreconstruction #robotics

1
2
86

今更だが,PapperでVisualSLAMしようかなあなんて気になってる
2
3
110

28 Oct 2025
VisualSLAMってどうなんだろうなぁ...
広い場所だとすごい弱いイメージがあるんだけど....
1
15
2,343


5 Aug 2025
🔥 Read our Highly Cited Paper
📚 Comprehensive Performance Evaluation between #VisualSLAM and #LiDARSLAM for #MobileRobots: Theories and Experiments
🔗 mdpi.com/2076-3417/14/9/3945
👨🔬 Yu-Lin Zhao, Yi-Tian Hong and Han-Pang Huang
🏫 @NTU_TW
#3DSLAM #3Dreconstruction

2
66

5 Jun 2025
投稿者:@hidematsu82
元の投稿内容:
x.com/hidematsu82/status/192…
静的シーンで実績を積んだ Visual SLAM を動的環境へ! #CVPR2025 で 4DTAM を発表。
4D SLAM is basically giving your Roomba parkour lessons; expect living-room freerunning and dramatically fewer intact coffee mugs.
4D SLAM はルンバにパルクールを教えるようなもの。居間で障害物競走が始まり、コーヒーマグの生存率は急降下。
#CVPR2025 #4DTAM #VisualSLAM #robotics #computervision
28 May 2025

Visual SLAM has made major success in static scenes — now let’s explore the dynamic world we live in!
At #CVPR2025, we introduce 4DTAM, 4D Tracking & Mapping using dynamic surface Gaussians optimized through diff. rendering.
muskie82.github.io/4dtam/
w/ @BaeGwangbin @AjdDavison
2
77


いしたーさんはVisualSLAMが得意。takminさんがマックで言ってた。 #cvsaisentan
3
299

5 Feb 2025
【📰ARニュース📰】
ARグラス・AIスマートカメラを提供するHMS株式会社が、イスラエルのfrontline.io社とドイツのHOLOLIGHT社と業務提携を発表しました!
🇯🇵HMS株式会社
高速VisualSLAMエンジンによる高精度3Dセンシング技術を基盤としたARグラス、「SiNGRAY」シリーズを展開しています。
「SiNGRAY Aシリーズ」は「軽量・鮮明画像・AR酔いを解消・給電しながらの使用」を可能にするデバイスです👓️
🇮🇱frontline. io社
XRによる作業指示・補助や遠隔支援システムのプラットフォームを提供し、
PC、タブレット、スマートフォン、ARグラスなどの様々なデバイスを活用したデジタルツインの環境構築を迅速に実現するソリューションをグローバルに展開しています💻️
🇩🇪HOLOLIGHT社
産業用3Dデータの可視化と操作を可能にするXRソフトウェア、インフラストラクチャ、ストリーミング技術を提供し、XRの活用拡大を支援しています🌐
今回の提携により、frontline. io社のソフトウェアと、HMS株式会社のARグラスの同時利用により、産業シーンにおけるDXが強力に推進されます↗️
また、HOLOLIGHT社のXRストリーミング技術により、大規模・複雑な環境での活用が可能となります🏭️✨
先日の「XVL VR」の「MeganeX superlight 8K」に対応のニュースや、PTCジャパンのニュースに続き、
製造業でのAR活用の注目ニュースが続いていますね!
#SiNGRAY #AR #ARグラス #製造業 #DX


1
2
368
15 Jan 2025
🔥 Read our Paper
📚 Comprehensive Performance Evaluation between Visual SLAM and LiDAR SLAM for Mobile Robots: Theories and Experiments
🔗 mdpi.com/2076-3417/14/9/3945
👨🔬 by Yu-Lin Zhao et al.
#3DSLAM #VisualSLAM
2
63

5 Dec 2024
DEADLINE EXTENDED to January 15 for submissions to the #VisualSLAM special collection. Thank you to @jcivera, @giov_cioffi, @davsca1, @StefanLeuteneg1, Abhinav Valada, Teresa Vidal-Calleja, and @ghuangud for handling the collection.
ieee-ras.org/publications/t-…
#GaussianSplatting

1
1
11
866

16 Oct 2024
DJI Air 3Sのプロモーション動画を見ると、Skydioが2019年に発売したSkydio2のそれを連想させるイメージが多い。Skydioが軍や警察、産業系に傾倒していく中で、民間向けの機体を継続しないと発表した。そんな中で、置いていかれたユーザーに救いの手を差し伸べる、そんな製品だと思う。
さらには当時のSkydioがVisualSLAMだけだったのに対して、Air 3Sは前方のみとはいえLiDARを搭載させたことで、Skydioが苦手とした夜間飛行にも対応してきた。
個人的には中望遠のカメラを使った合成パノラマ写真機能が気になる。商売ですぐ使えそう。
youtu.be/CKidDWdcPLY?si=FmFY…
1
15
788
14 Aug 2024
T-RO is accepting submissions for the new #VisualSLAM special collection until December 15. Thank you to @jcivera, @giov_cioffi, @davsca1, @StefanLeuteneg1, Abhinav Valada, Teresa Vidal-Calleja, and @ghuangud for handling this special collection.
ieee-ras.org/publications/t-…

5
37
2,011


25 Jun 2024
T-RO is now accepting submissions for the new #VisualSLAM special collection. Thank you to @jcivera , @giov_cioffi, @davsca1, @StefanLeuteneg1, Abhinav Valada, Teresa Vidal-Calleja, and @ghuangud for handling this collection.
ieee-ras.org/publications/t-…

2
13
966

18 Jun 2024
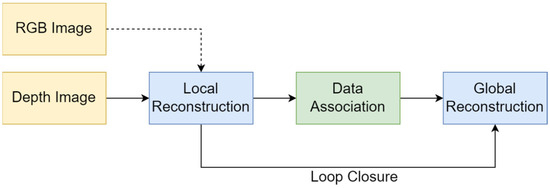
This article is the second part of the Robotics blog series. Here, we cover SLAM, monocular visual SLAM, and how to implement it in Python.
We've also explored key concepts in robotics perception, including image formation, epipolar geometry, mapping, bundle adjustment, and loop closure.
learnopencv.com/monocular-sl…
It's a great starting point for anyone learning about SLAM and Visual SLAM.
#python #monocularslam #visualslam #robotics #orb
5
31
1,871

6 May 2024
シンプルなVisualSLAMだと振動で詰んだりしそうだけど行けるのかな
あとこういう平地じゃないとこを走るロボットの経路生成ってやり方あるのかな
6 May 2024

【技術紹介】
自律走行時は #realsense で環境認識し、#move_base などのROSパッケージを活用してVisualSLAMしています。
理論を理解するのはかなり難しいですが、オープンソースや多くのドキュメントの力を借りて高得点を目指しています!
1
8
704

6 May 2024
【技術紹介】
自律走行時は #realsense で環境認識し、#move_base などのROSパッケージを活用してVisualSLAMしています。
理論を理解するのはかなり難しいですが、オープンソースや多くのドキュメントの力を借りて高得点を目指しています!
1
5
32
7,146