Concrete lab throwback.
Slump test 🤝 Compaction factor.
#CivilEngineering #EngineeringStudent #ConcreteTest #FutureEngineer #StudentEngineer #FUNAAB
1
5
30

Let's Pop some balloons again this year 🎉
Happy Birthday 🎂 to ME! 🤩🥳
#february25 #februarycelebrant #victorytomiwa #studentengineer #february2026



6
129

Jan 13
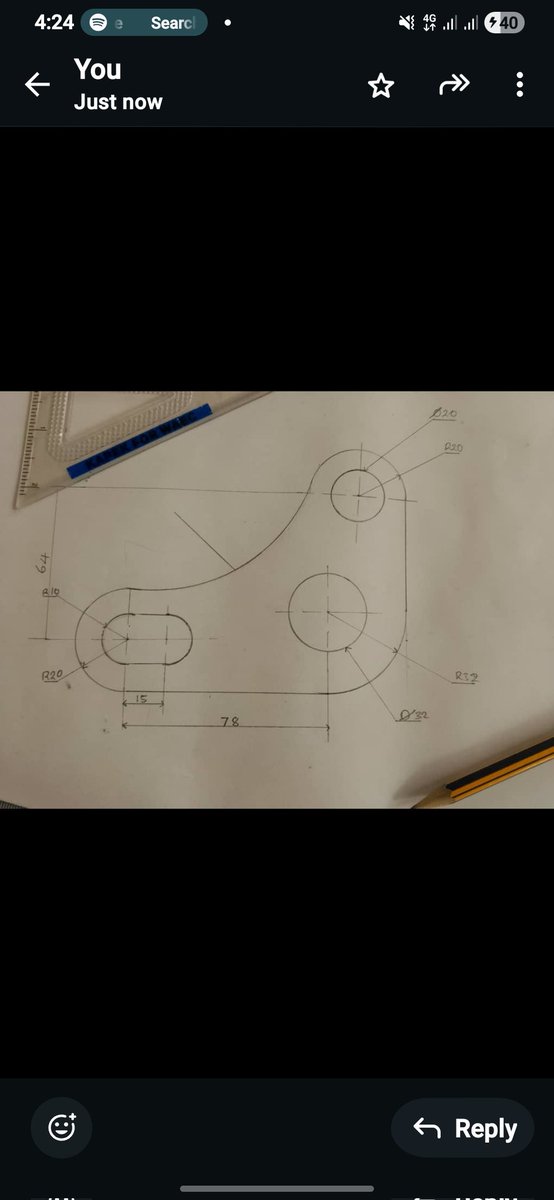
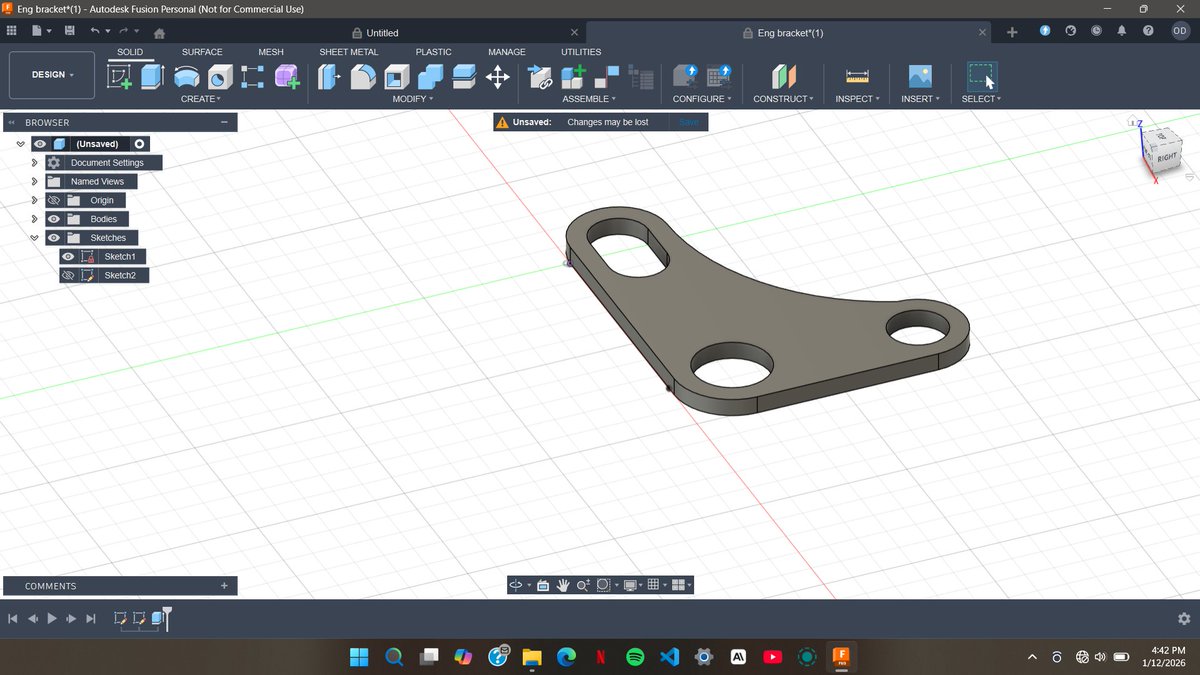
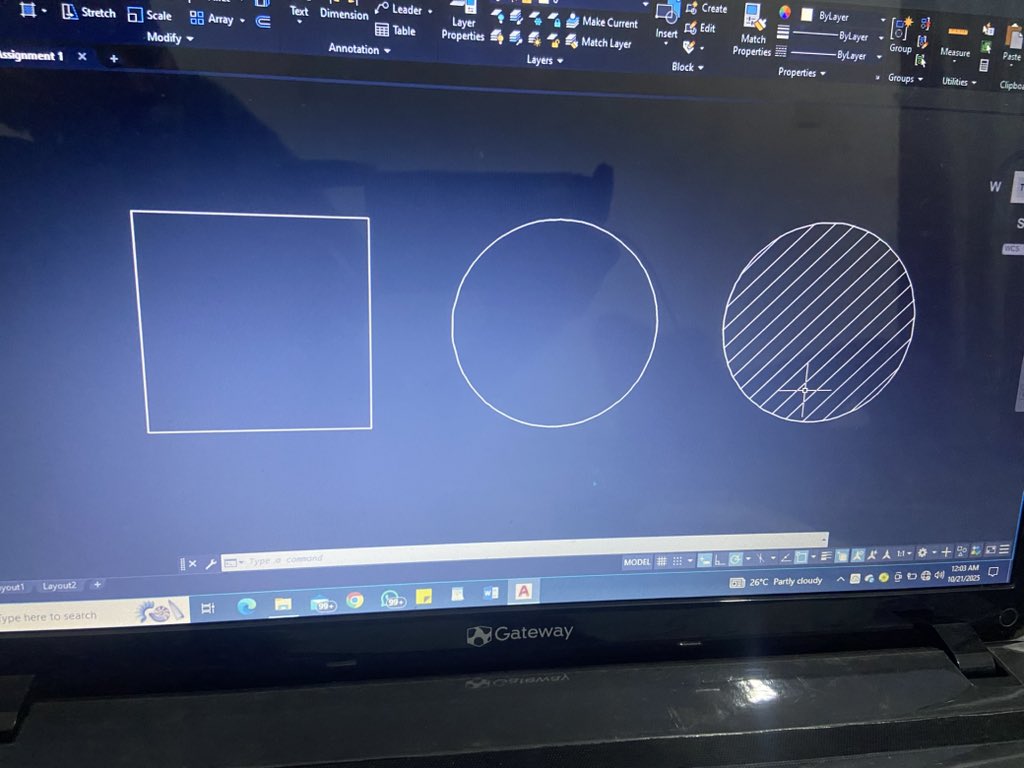
First time designing a motor mount in CAD without tutorials.
Just relying on basic engineering drawing principles and patience and it actually turned out better than I expected.
Still learning. Still building. Step by step.
#CAD #Engineering #Robotics #3DDesign #StudentEngineer


3
19

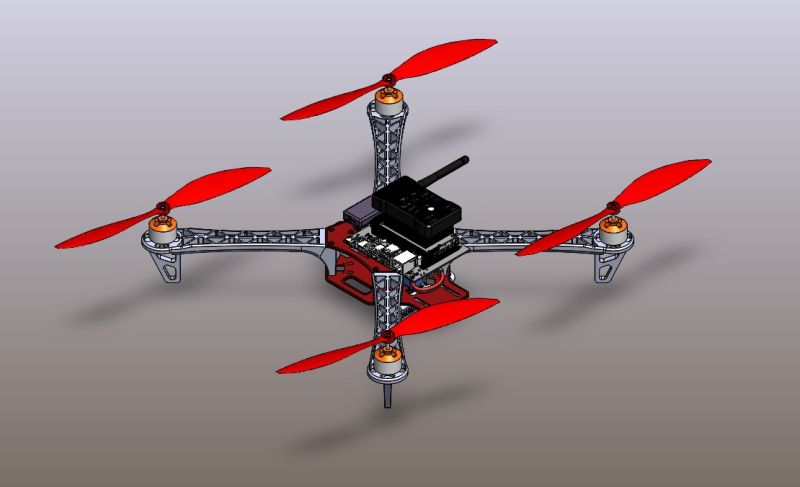
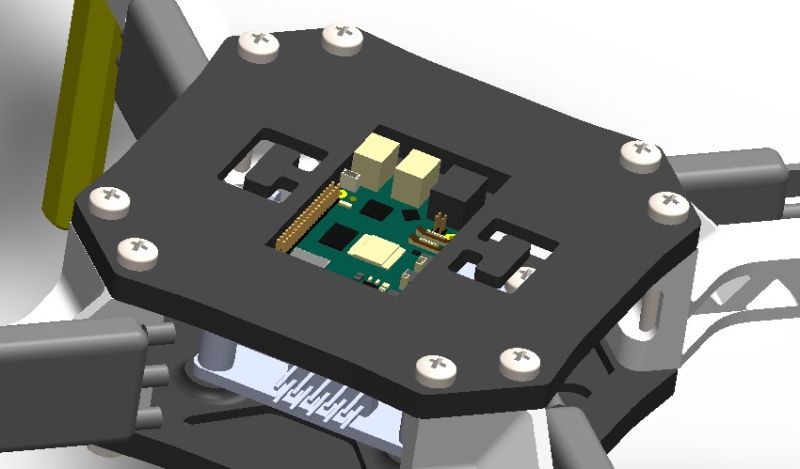
🚁 Autonomous & Swarm Drone System | AI-Controlled | Simulation-Verified
Designed and developed a fully autonomous drone architecture with a strong focus on AI-based decision making, safety fallback mechanisms, and swarm coordination.
🔧 System Architecture
o) Parent Compute Unit: Raspberry Pi 4B (companion computer)
o) Flight Controller: Pixhawk 2.4.8
o) Autonomy Stack: Python DroneKit API
o) Simulation Environment: Gazebo SITL
o) Communication: MAVLink protocol
The Raspberry Pi handled high-level autonomy and AI logic, while Pixhawk managed low-level flight stabilization and sensor fusion, ensuring a clean separation between decision-making and flight control.
🧠 Autonomous Capabilities
o) Fully AI-controlled autonomous flight using DroneKit
o) Waypoint navigation path deciding, state monitoring, and mission execution
o) Real-time command injection via MAVLink
o) Fail-safe logic and mode switching between autonomous and manual states
The entire autonomy pipeline was validated in simulation, covering takeoff, navigation, and control stability inside Gazebo before any physical deployment.
🧤 Emergency Hand-Control Gloves (Human-in-the-Loop Safety)
To ensure manual override and safety, an emergency hand-controller glove system was designed:
o) Embedded ESP-based controller
o) Wireless communication between ESP ↔ Raspberry Pi
o) Gesture-based / manual override to regain drone control instantly
o) Designed for fail-safe intervention during autonomous missions
This introduced a human-in-the-loop control layer, crucial for real-world autonomous systems.
🐝 Swarm Drone Concept
Designed a multi-agent swarm architecture with:
o) One parent/master drone
o) Multiple child drones (grey-colored units)
o) Focused on coordination logic, scalability, and distributed control
Conceptual groundwork for:
o) swarm coordination
o) leader–follower models
o) multi-drone mission planning
🏆 Competition Context
Autonomous Drone System: Designed for ISRO Robotics Challenge
Swarm Drone Architecture: Conceptualized for RoboFest Gujarat
🛠️ Technical Keywords & Concepts Involved
Autonomous UAVs · DroneKit · MAVLink · Pixhawk · Raspberry Pi Companion Computer AI-Based Control · Human-in-the-Loop Systems · Swarm Robotics Multi-Agent Systems · Leader–Follower Architecture Embedded Systems · ESP Microcontrollers Simulation-First Development · Gazebo SITL Fail-Safe Design · Control System Integration
📌 Project Scope
Complete ideation, system design, CAD planning, software architecture, and coding
Fully implemented and validated in simulation state
Strong emphasis on safety, modularity, and scalability
📕 ebokify.com/robotics
Building autonomous systems isn’t just about making machines fly it’s about making them reliable, safe, and intelligent.
#AutonomousDrones #SwarmRobotics #UAV #AI #EmbeddedSystems #Pixhawk #DroneKit #Robotics #Simulation #StudentEngineer


2
19

22 Oct 2025
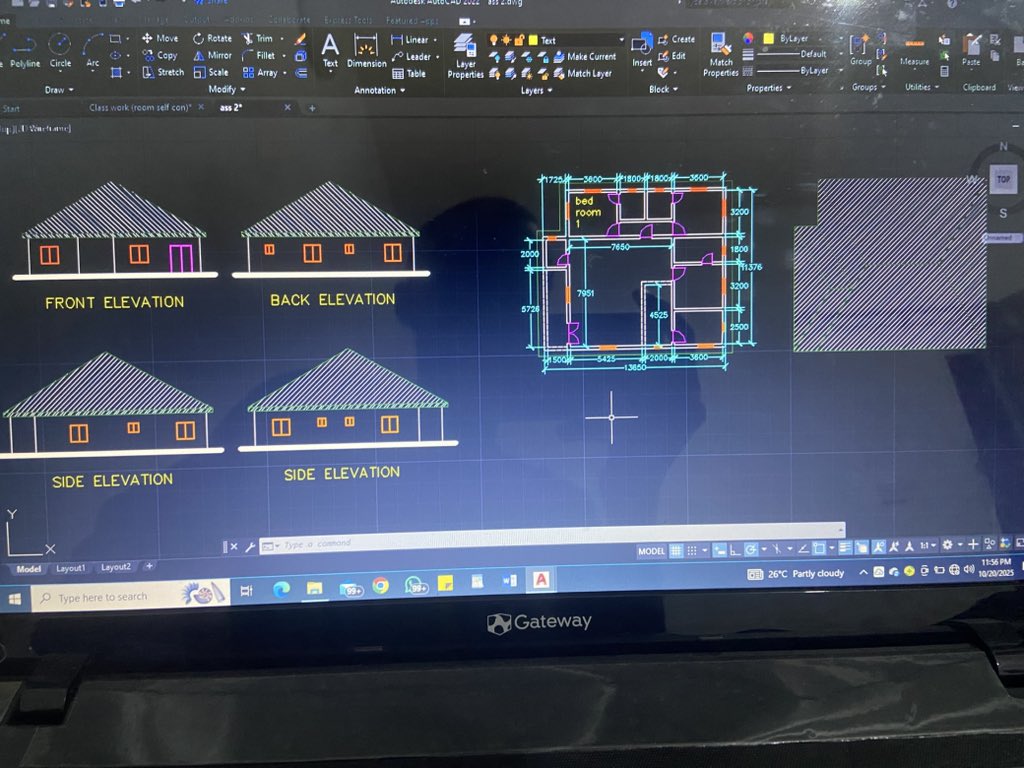
Each class, a new challenge. From simple shapes to full designs. Growth in motion. 🚀 #EngineeringJourney #CivilEngineering #AutoCAD #FutureEngineer #StudentEngineer #FUNAAB #ACES #NUESA #LearningByDoing #DesignProcess
2
5
86

31 Jul 2025
My next project: building a cloud-connected web dashboard for a smart solar inverter 💡
Real-time monitoring from ESP32 → Web app
School Group project. I’m fully in charge of the frontend.
Let’s ship something impactful.
#IoT #WebDev #StudentEngineer #SolarTech
55

16 Nov 2023
Tell me this isn't true! 🤣 👏 🌃
#EngineeringMemes #Funny #Engineer #Tech #Engineering #Relatable #WeAreRS #StudentEngineer

1
3
725

31 Oct 2023
Use our ElecFreaks Wukong 2040 breakout board to realize some inspirational creations that you think will be awesome!🧐🤯
#elecfreaks #studentengineer #engineeringstudent #engineering #engineer #electronics #electronica #components #computer #electricity #universitystuden
8
824

18 Sep 2023
The Institut Teknologi Sepuluh Nopember Student Branch in Indonesia has set out to help the Yayasan Pembinaan Anak Cacat Surabaya medical rehabilitation center. Learn more about how this team helped patients. bit.ly/44YTspZ #ServiceLearning #IEEE #StudentEngineer
1
4
104
18 Jun 2023
1
3
884

3 Dec 2022
Ahead of the #UIPEAt50 Celebrations, meet Sejjungo Rodney Jonathan.
A Mechanical and Manufacturing Engineering student at Kyambogo University. @kyambogou
Well done Jonathan.
#StudentEngineer
#UIPEAt50

5
23 Nov 2022
Meet Drici Simon, an Engineering student @kyambogou .
He is offering Environmental Engineering and Management.
We celebrate him today!
#StudentEngineer
#UIPEAt50

1
5
23 Nov 2022
Meet Bbombokka James.
He is pursuing automotive and power engineering @kyambogou
Goodluck!
#StudentEngineer
#UIPEat50
1
3
21 Nov 2022
Muganzi Peter is proud to be an Engineering student. He is pursuing a Bachelor’s degree in Civil Engineering, @NdejjeUnive
Peter is the Publicity Secretary of Ndejje University Engineering Students Association. @NUESA22
Kudos to you Peter.
#StudentEngineer
#UIPEAt50
4
15
11 Nov 2022
Birungi Tessa Courtney is the President of @UCUniversity Class Representatives Association.
She is doing a Bachelor of Science in Civil and Environmental Engineering.
#UIPEAt50 recognizes you today.
#studentengineer
#UIPEAt50
2
11
53

28 Oct 2022
Student engineers in the Gifted program at Madison Avenue ES testing materials to design the best model membrane.
#IrvingtonSchools
#StudentEngineer
#Gifted

1
3

3 Oct 2022
Can you solve a real-world #sustainability problem in just one weekend? Find out with Engineers Australia #GradHack2022.
fal.cn/3sowx
#Studentengineer #graduateengineer #youngengineers #YEA
1
2

Hoping the next generation of chemical engineers get the grades they need today! If you are off to study ChemEng, tell us where you are going and what you are most looking forward to. 🗺️ 🎓
#ALevels2022 #ExamResults #exams #ExamsOver #ChemicalEngineeringStudent #studentengineer

1
4

First-year computer engineering student, @AidanHyman ran his sixth marathon on April 18 in Boston. His efforts at the @bostonmarathon helped raise money for the @BostonChildrens Hospital. #RITstudent #RITengineering #studentengineer bddy.me/3NJdX1Y
4

7 Jun 2022
South African Engineering Students! Share your project with us for the chance of winning a £1000 cash prize!
Follow the link to enter and for more information: ow.ly/tBBy50Jrcqe
#Student #Studentengineer #studentproject #University #engineering #youngengineer #STEM
1
2