
PhD student at @Mila_Quebec, focusing on autonomous driving. Previously @Waymo and @torc_robotics.
Joined February 2022
- Tweets 107
- Following 175
- Followers 157
- Likes 1,046
9 Photos and videos
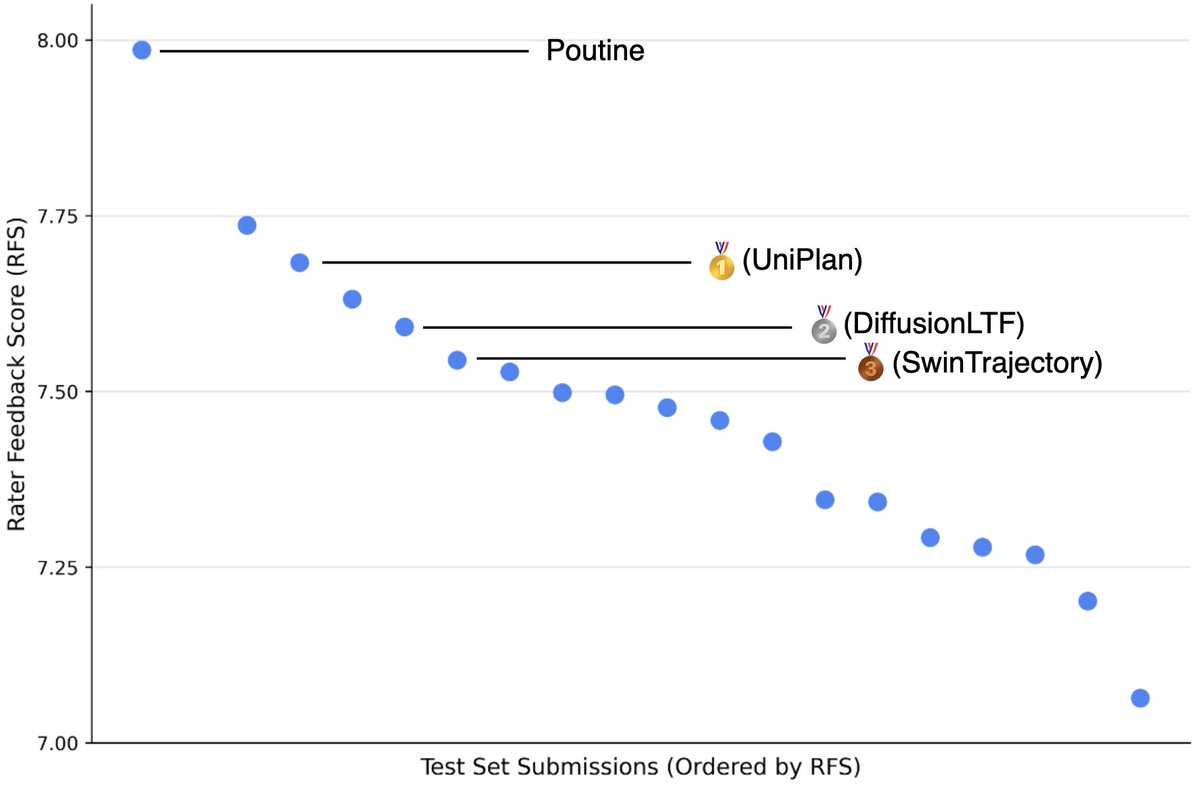




🚀 Our method, Poutine, was the best-performing entry in the 2025 Waymo Vision-based End-to-End Driving Challenge at #CVPR2025!
Our 3 B-parameter VLM Poutine scored 7.99 RFS on the official test set—comfortably ahead of every other entry (see figure).
4
11
22
3,221
Luke Rowe retweeted

May 29
We’ve just released the #Alpamayo Chain-of-Causation (CoC) Autolabeling Pipeline — a feature that has been highly requested by the community!
The pipeline automatically derives:
🔹 Meta-actions: high-level categorical descriptions of ego motion
🔹 Chain-of-causation labels: causal links between scene factors and the ego vehicle’s intended behavior
Autolabeling pipeline: github.com/NVlabs/alpamayo-c…
Learn more about the Alpamayo open platform: huggingface.co/blog/drmapavo…
We’re excited to see what the community builds with it, and we hope this tool will help accelerate research in the rapidly growing area of #reasoning models for #Physical #AI.
@NVIDIADRIVE @NVIDIAAI
1
15
54
3,696
Luke Rowe retweeted

May 27
Excited to introduce #TruckDrive 🚛 at #CVPR2026: a new long-range driving dataset built specifically for long-range truck autonomy, where safe braking and anticipatory planning demand perception hundreds of meters ahead, far beyond existing robotaxi datasets.
📦 TruckDrive includes:
🔹 475K samples, with 165K densely annotated frames
🔹 Benchmarks for end-to-end driving, tracking, planning, depth estimation, and up to 1,000m for 2D detection and 400m for 3D detection 📏🎯
🛰️ A purpose-built long-range sensor suite:
🔸 7 long-range FMCW LiDARs (range radial velocity)
🔸 3 high-res short-range LiDARs
🔸 11× 8MP surround cameras for short and long-range📷
🔸 10× 4D FMCW radars 📡
⚠️ Key finding: current state-of-the-art models break down at long range
📉 with 31% to 99% drops on 3D perception tasks beyond 150m. TruckDrive exposes a long-range generalization gap that current architectures and training signals are not closing yet - a benchmark for the next generation of long-range highway autonomy research 🚚
🔗 Project and Data: torc-ai.github.io/TruckDrive…
Fun work together with @torc_robotics led by Filippo Ghilotti, Edoardo Palladin, Samuel Brucker, Adam Sigal, and Mario Bijelic.
21
60
4,473
Luke Rowe retweeted
Apr 27
Are we done with object detection? What about tiny objects beyond 200 meters? 🔎
Telescope 🔭 addresses long-range perception by explicitly tackling extreme scale imbalance ⚖️ in images. It hinges on a learnable hyperbolic foveation transform from a low-resolution image, magnifying distant regions 🔍 while compressing nearby ones - effectively normalizing object scales with minimal computational overhead. Objects are detected in the transformed (Riemannian) space using a novel bounding box parameterization and are then mapped back to the original image.
Project: light.princeton.edu/telescop…
22
120
1,115
188,380
Luke Rowe retweeted

Apr 22
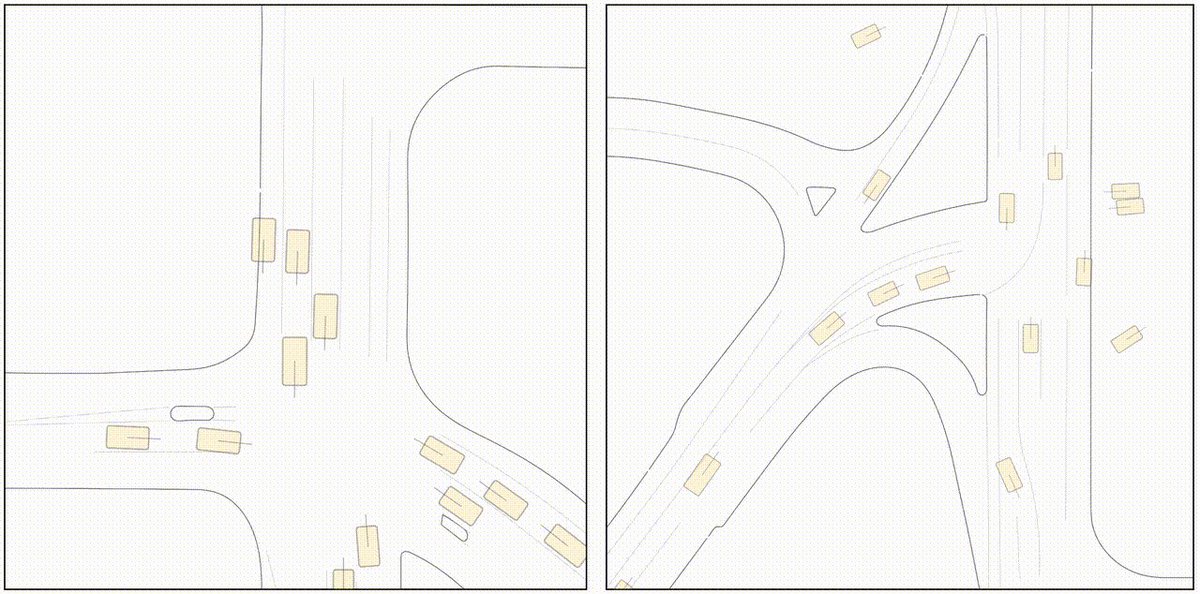
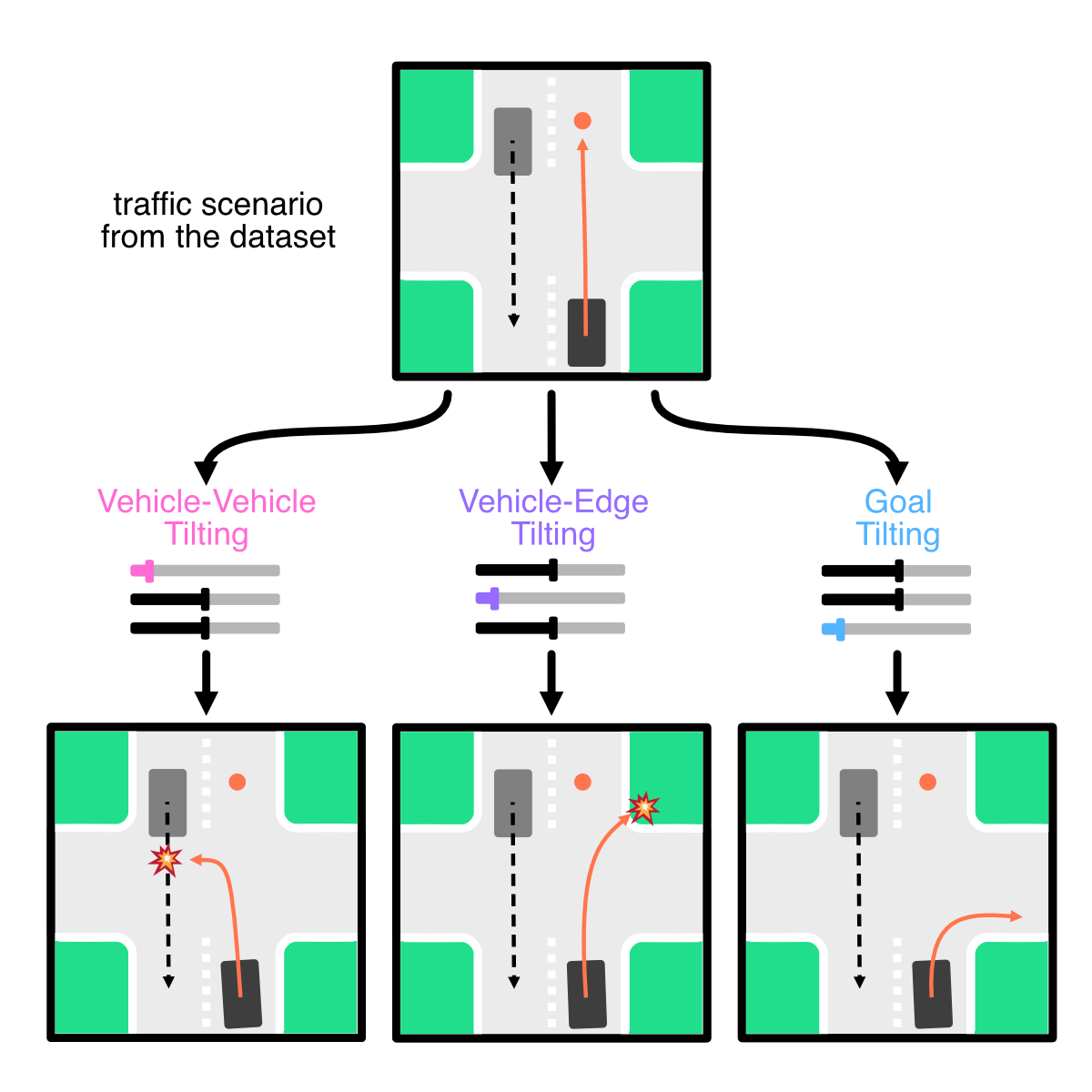
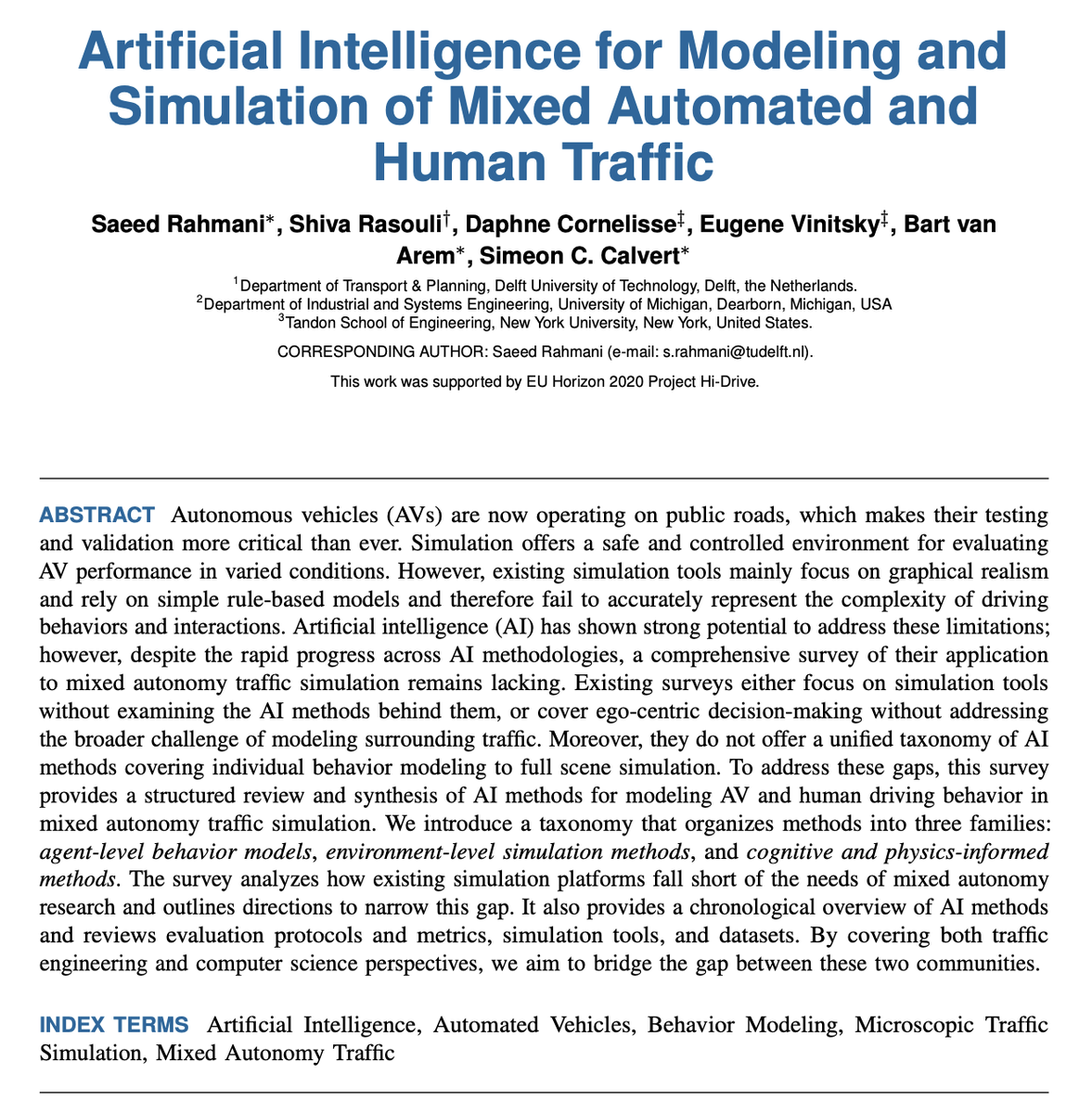
New preprint led by @saeedrmd! “Artificial Intelligence for Modeling and Simulation of Mixed Automated and Human Traffic."
Drawing on 200 papers, it offers a snapshot of where the field stands and outlines promising directions ahead.
ALT https://arxiv.org/abs/2604.12857
1
2
16
1,495
Luke Rowe retweeted
Apr 22
ScenarioControl 🚗🛣️ - Scenario Generation from a single Dashcam Image 📸 or Text Prompt 💬!! Excited to introduce a new vision-language control mechanism for learned driving scenario generation. Given a single dashcam image or a scene prompt or an image, we generate a full scene layout 🧩, temporally consistent rollouts, including map 🗺️, agents 🚗, and ego video🛣️
ScenarioControl enables direct, fine-grained control over layout and traffic while preserving realism. It operates in a vectorized latent space with a new cross-global control mechanism to fuse vision-language inputs with scene structure while preserving realism. Interfaces seamlessly with generative video models!
Project: light.princeton.edu/Scenario…
Super fun project by Lili Gao, @Yanbo_Xu_ , William Koch, Samuele Ruffino, @Luke22R , Behdad Chalaki, Dmitriy Rivkin, Julian Ost, @rogg1111, Mario Bijelic.
11
39
22,253
Luke Rowe retweeted

Apr 19
Reasoning VLAs can think. They just can't think fast. Until now.
Introducing FlashDrive⚡
🚀 716 ms → 159 ms on RTX PRO 6000 (up to 5.7×)
✅ Zero accuracy loss
FlashDrive = streaming inference DFlash speculative reasoning ParoQuant W4A8
Real-time reasoning for autonomous driving is here!
z-lab.ai/projects/flashdrive…
33
163
1,303
164,437
Luke Rowe retweeted
Apr 13
Chop the gradients ✂️! We found that truncating decoder gradients in latent video diffusion to a fixed window allows us to finetune on videos with pixel-wise perceptual losses without running out of memory. Pixel losses have been essential for image generation and reconstruction, but until now, they haven't scaled to long-duration, high-resolution video diffusion due to recursive activation accumulation in causal decoders, leading to OOM during training 💥📉.
Project: light.princeton.edu/chopgrad…
Video diffusion models can do a lot more 🚀 when you can backprop the decoder! Post-process neural rendered scenes, super-resolve videos, harmonize lighting in controlled synthetic driving scenes, and inpaint videos — all in a single step ⚡ with a quick finetune from a standard diffusion model.
4
39
348
28,319
Luke Rowe retweeted
Apr 7
WorldFlow3D: Unbounded 3D World Generation 🌍 by Flow Through Hierarchical Distributions, without VAEs !
We reformulate 3D generation as flowing through sequentially finer 3D distributions, cutting training time by more than half ⏱️ compared to existing approaches! Vectorized map layouts provide full scene controllability 🗺️, and a novel flow-field alignment process enables causally coherent, spatially unbounded generation 🌍. This generative method generalizes across both real and synthetic data distributions!
Project: light.princeton.edu/worldflo…
Project led by @amogh7joshi and Julian Ost — will be super fun to build on this! 🔥
2
27
238
19,464
Luke Rowe retweeted

Apr 6
Releasing PufferLib 4.0: Train agents in seconds
40
99
1,185
201,100
Luke Rowe retweeted

Mar 26
We’re releasing OmniReset, a framework for training robot policies using large-scale RL and diverse resets for contact-rich, dexterous manipulation.
OmniReset pushes the frontier of robustness and dexterity, without any reward engineering or demonstrations.
Try the policies yourself in our interactive simulator! weirdlabuw.github.io/omnires…
(1/N 🧵)
21
94
466
108,523

🎮 Can we learn interactive world models from letting robots “play”?
➡️ Introducing ✨PlayWorld: a framework for training high-fidelity video world models from large-scale autonomous play experience that enables:
→ Accurate dynamics prediction
→ Reliable policy evaluation
→ RL fine-tuning entirely inside the world model
🌐robot-playworld.github.io
2
32
189
35,532
Luke Rowe retweeted

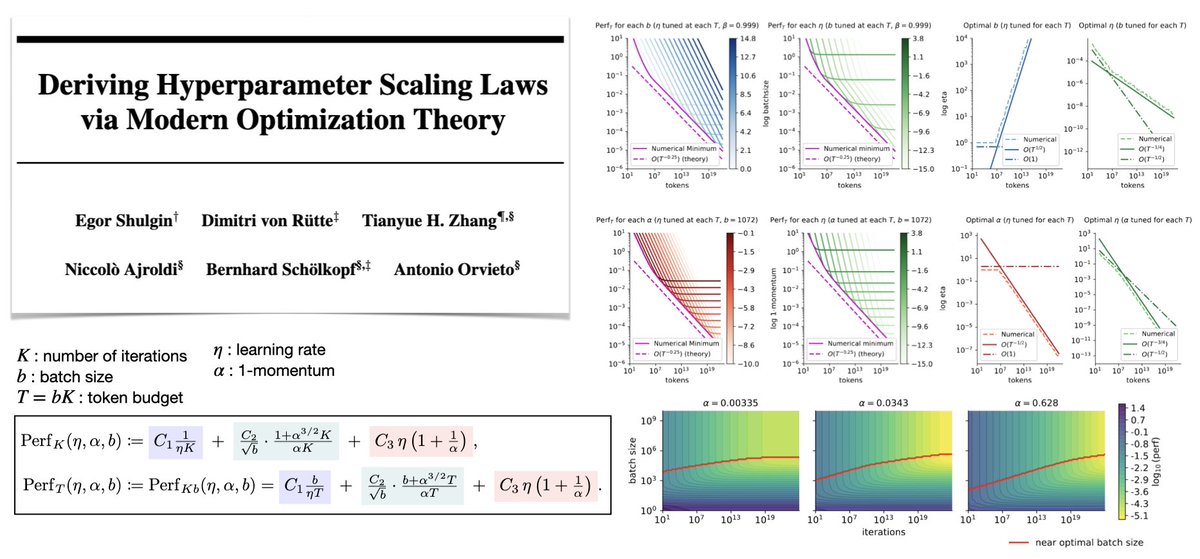
🚨 New Paper 🚨
TL;DR we derive scaling laws of lr, momentum, and batch size for modern first-order optimizers through the lens of recent convergence bounds for LMO, a framework that includes normalized SGD, signSGD (approximating Adam), and Muon
x.com/orvieto_antonio/status…
Mar 23

Optimization theory for adaptive methods actually predicts most of what we know about hyperparameter scaling in LLM pretraining, and suggests new strategies as well. We did a deep dive here.
1
15
87
8,738
Luke Rowe retweeted

Mar 23
JEPA are finally easy to train end-to-end without any tricks!
Excited to introduce LeWorldModel: a stable, end-to-end JEPA that learns world models directly from pixels, no heuristics.
15M params, 1 GPU, and full planning <1 second.
📑: le-wm.github.io
109
559
3,969
956,974
Luke Rowe retweeted

Feb 25
Introducing @QuiverAI, a new AI lab and product company focused on frontier vector design.
We’ve raised an $8.3M seed round led by @a16z, with support from amazing angels and investors.
Our first model, Arrow-1.0, generates SVGs from images and text. It’s available now in public beta at app.quiver.ai
307
290
4,830
1,280,648
Luke Rowe retweeted

Mar 17
What if a world model could render not an imagined place, but the actual city?
We introduce Seoul World Model, the first world simulation model grounded in a real-world metropolis.
TL;DR: We made a world model RAG over millions of street-views.
proj: seoul-world-model.github.io/
42
204
1,523
178,311
Luke Rowe retweeted

Mar 10
I'm not sure about the details but I'm convinced that how to publish and create impact is due to change very significantly in the near future. The value of writing and reading 8 page PDFs is rapidly dropping. What is the right way to publish the nugget of a research contribution?
Mar 10

If I was a grad student today, I would: 1) Not write papers, 2) push my (agent-written) code to a public repo ~weekly, 3) maintain (via agents) a writeup.tex (manually verified) and a skill.md in the repo, and 4) work towards establishing skill usage as the new "citation" format.
12
14
123
21,657
Luke Rowe retweeted

Mar 10
Montreal deep tech scene is getting hot!! Many recent hires of Cohere, Mistral, Periodic Labs, Poolside are all based in Montreal. And now, AMI will have an office here 🔥
It's a no-brainer, though. @Mila_Quebec has the highest concentration of deep learning expertise with interdisciplinary connections.
Thanks to recent US regulation changes on immigration, no more brain drain! Let's build more in Canada!
Mar 10

Unveiling our new startup Advanced Machine Intelligence (AMI Labs).
We just completed our seed round: $1.03B / 890M€, one the largest seeds ever, probably the largest for a European company.
We're hiring!
[the background image is the Veil Nebula - a picture I took from my backyard, most appropriate for an unveiling]
More details here:
techcrunch.com/2026/03/09/ya…
19
48
751
72,809
Luke Rowe retweeted

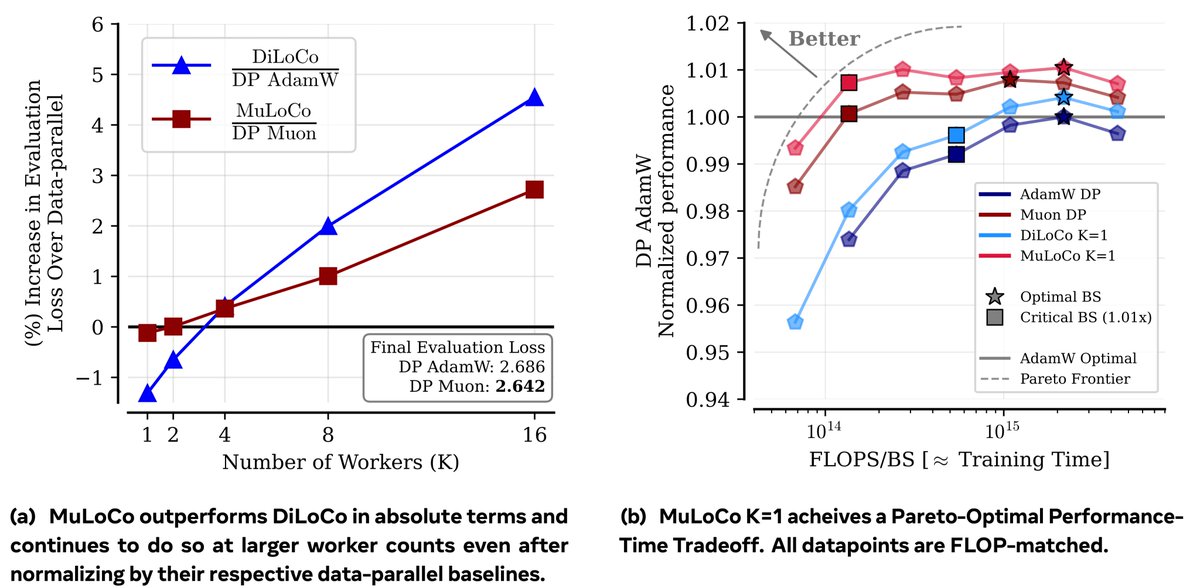
Are frontier LLMs trained across datacenters? One thing is certain: if the pre-training optimizer’s critical batch size is too small, they are NOT! Excited to announce MuLoCo, a pre-training optimizer that can efficiently pre-train across datacenters while having large enough batch sizes to warrant doing so. 🧵1/N
3
33
93
18,087
Luke Rowe retweeted

Feb 19
4
74
513
151,258
Luke Rowe retweeted
Feb 8
Benchmarks are a key driver of progress. But how should we evaluate human-like driving? Does the Waymo Open Sim Agent Challenge (WOSAC) really capture what matters?
Looking forward to any feedback!
ALT https://daphnecornelisse.substack.com/p/how-to-think-about-human-likeness?r=2n3hgw
3
5
40
6,979