
Undergrad in @Tsinghua_IIIS, Yao Class | Robot Learning, Generative AI
Joined September 2024
- Tweets 47
- Following 319
- Followers 102
- Likes 975
2 Photos and videos

Pinned Tweet

Jun 2
Flexible Locomotion Learning with Diffusion Model Predictive Control
Excited to share that our paper has been accepted to #ICRA2026 @ieee_ras_icra!
A diffusion-planning framework for flexible real-world quadruped locomotion. Instead of learning a fixed RL policy or relying on hand-crafted dynamics for MPC, we train a diffusion trajectory prior that jointly predicts future states and actions.
Key Ideas:
Diffusion-MPC: A diffusion planner unlocks flexible locomotion through test-time reward and constraint adaptation
Interactive reward-weighted finetuning enables continual behavior refinement from online environment feedback
Real-world deployment on Unitree Go2 with efficient and adaptive planning
The same planner can adapt at test time to height changes, posture/joint constraints, balancing under external disturbances, energy-aware locomotion, and zero-shot outdoor walking on grass and slopes.
🌐Homepage: flexible-diffusion-mpc.githu…
📖Paper: arxiv.org/abs/2510.04234
🔗Code: github.com/hrh6666/Flexible-…
This work is by @RunhanH, Haldun Balim, @hankyang94 , and @du_yilun.
#ICRA2026 #Robotics #LeggedRobots #RobotLearning #DiffusionModels #MPC #MachineLearning
2
27
78
14,783
Runhan Huang retweeted

Jun 11
🤖✨Excited to share our new work:
OMG: Omni-Modal Motion Generation for Generalist Humanoid Control
What if a humanoid could understand intent from language, music/audio, human motion, or their combinations—and turn it into executable whole-body motion in real time? [🧵1/11]
3
33
168
11,436
Runhan Huang retweeted

Excited to share our CVPR work: SIMPACT: Simulation-Enabled Action Planning using Vision-Language Models, 11:45 PM – 1:45 PM at ExHall F 611
simpact-bot.github.io/
How can we make VLMs plan robotic manipulation actions with grounded physical reasoning?
5
11
47
16,444
Runhan Huang retweeted

Jun 4
Best Conference Paper Award and the Best Paper Award on Robot Manipulation and Locomotion at #ICRA2026!

1 Oct 2025

High-quality motion reference data is key for humanoid skill learning 🤖🕺💃
A natural idea is to leverage human motions and “translate” them to humanoid motions, a process known as retargeting. For interaction-rich tasks such as scene interaction and loco-manipulation, retargeting is challenging: it must ensure motion consistency, smoothness, kinematic feasibility (no artifacts like penetration or foot skating), and scalability (one framework can handle thousands of motions).
Excited to release OmniRetarget — a scalable retargeting method with a 4-hour high-quality humanoid motion dataset for interaction-rich tasks. OmniRetarget takes an interaction-preserving perspective: we optimize Laplacian deformation between source and target interaction meshes while enforcing kinematic constraints, producing consistent, smooth, and feasible trajectories at scale. Even better, OmniRetarget can efficiently augment motions by varying terrains, objects, and initial poses.
This high-quality interaction-preserving retargeting enables a minimal RL setup to execute long-horizon (up to 30s) agile, interaction-rich skills. All tasks in the video share just 5 rewards, 4 domain randomization terms, and rely only on proprioception.
More details: omniretarget.github.io/
20
20
398
32,085
Runhan Huang retweeted

Jun 4
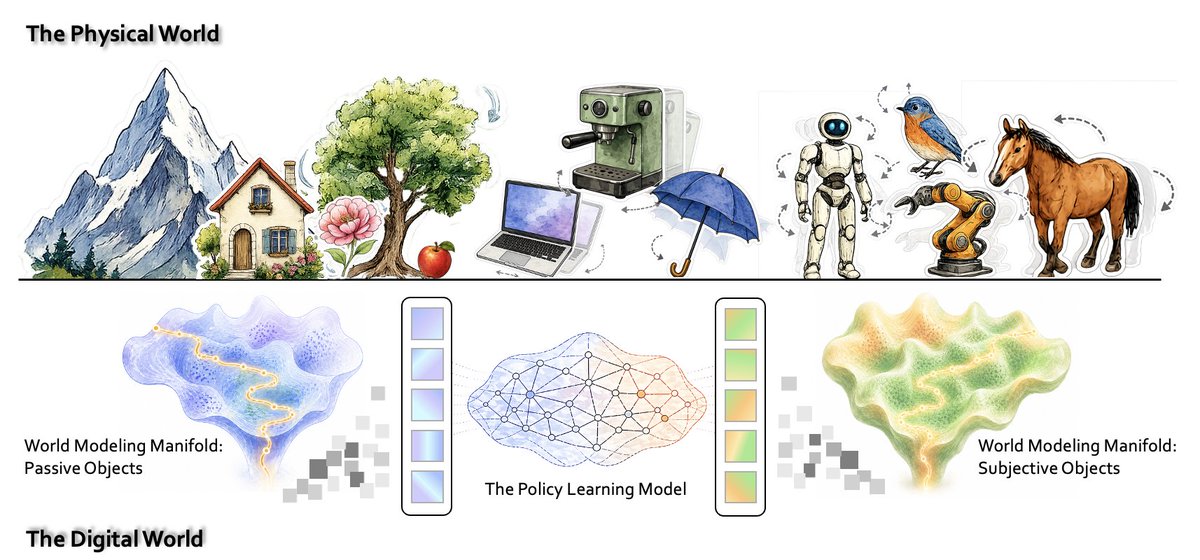
Really appreciate the opportunity to share our new direction on 4D Digital Twins 🌍✨
Actionable World Representation is a research direction initiated during my postdoc, and I’m excited to develop it as a new stream of work in my lab.
I’ll be presenting this work virtually in CVPR2026 today from 4:30–5:15 PM in Room 2C. Looking forward to sharing and discussing! 🚀
#CVPR2026
Jun 3

very excited for the 4D Digital Twins workshop happening tomorrow #CVPR2026 ! we have an amazing set of speakers talking about 4D real-to-sim-to-real challenges🦾
🗓️ Thurs June 4 · 1:00 – 6:00 PM
📍 Mile High 2C
🔗 research.nvidia.com/labs/amr…
2
6
23
4,240
Runhan Huang retweeted

Jun 4
Imagine a population of machine agents. Each might be strong on certain tasks but fundamentally limited: partial tools, partial observations, finite context, bounded compute.
How can these agents self-orchestrate and self-evolve into stronger collective intelligence to solve tasks beyond any single agent's capability?
Instead of designing the multi-agent system itself, we propose designing the incentives that govern it.
We put agents in an economy. They compete, trade, get wealthy, go bankrupt, and mutate, forming an alive society where coordination and adaptation automatically emerge in a decentralized manner.
5
23
169
238,258
Runhan Huang retweeted

Jun 3
I'm giving a spotlight talk tomorrow, June 4, 10am in Room 2A.
Sharing the latest series of 𝗿𝗼𝗯𝗼𝘁 𝗰𝗼𝗱𝗶𝗻𝗴 𝗮𝗴𝗲𝗻𝘁 works we built at UC Berkeley / NVIDIA GEAR.
capgym.github.io/
Apr 22

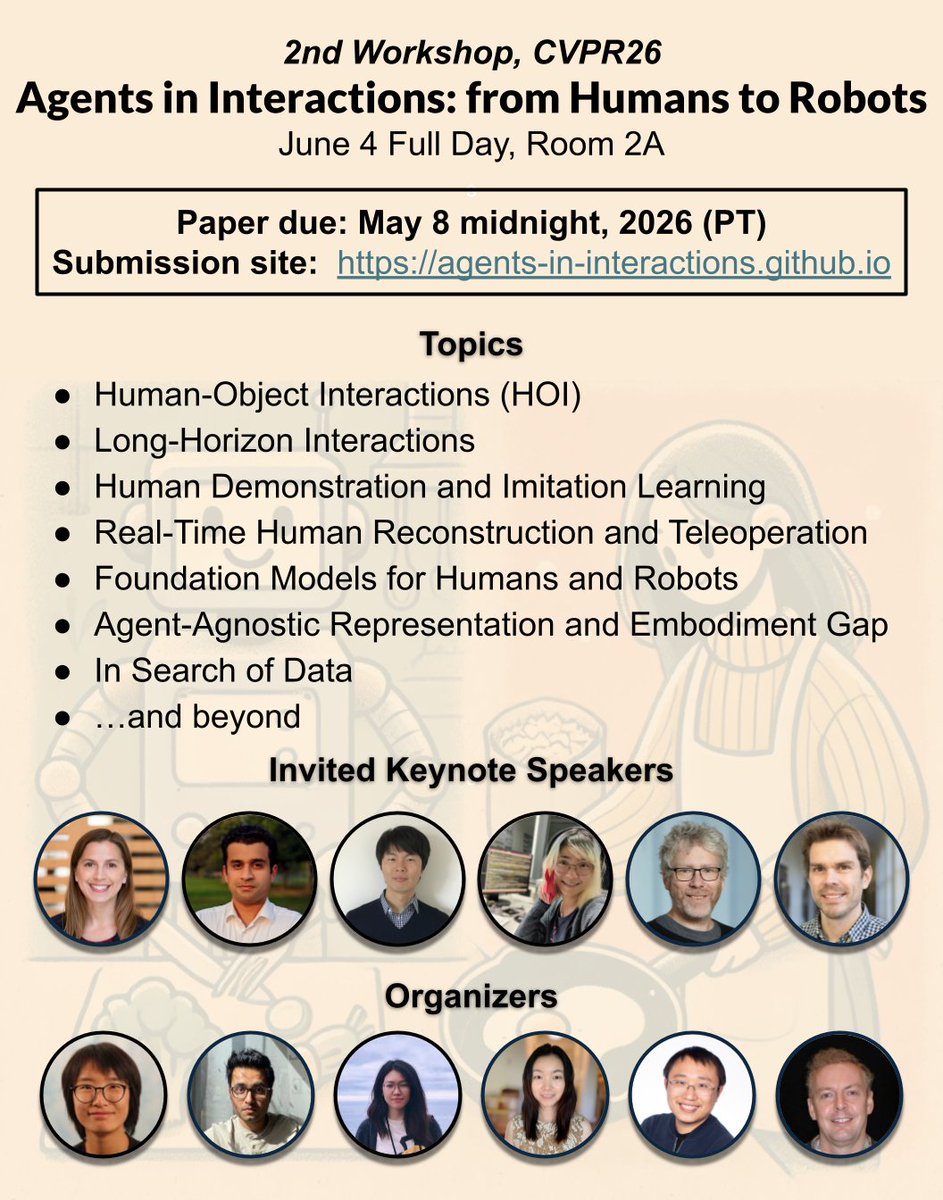
We're thrilled to organize the 2nd Workshop on Agents in Interactions: From Humans to Robots!
Submit your best work by May 8 and join us at CVPR in Denver to discuss research in this exciting space
w/ @yufei_ye @DandanShan_ @jiaman01 @xiaolonw Alan Yuille
1
11
36
4,926
Runhan Huang retweeted

Jun 3
Tomorrow (Thursday morning), 9:00–10:30 AM, I'll be at Poster 326 to present our work on a new imitation learning framework, MIMIC, for training a sidewalk autopilot. Stop by if you're attending #ICRA2026 in Vienna:
MIMIC (Multi-scale IMItation with Corrective expansions) trains sidewalk autopilots from teleoperation data by expanding corrective behaviors and visual diversity through generative augmentation.
Project page: vail-ucla.github.io/MIMIC/
2
14
141
11,241
Runhan Huang retweeted

Apr 28
Mobile manipulation is not just putting arms on wheels. It introduces a different class of challenges, such as partial observability, whole-body interface design.
However, researchers are often held back by hardware setup before they can get to the actual research problems.
I recently wrote a tutorial, haoyu-x.github.io/simple-mob… to make the process easier.
With support from hardware vendors, you can now purchase an out-of-box hardware kit directly, without having to build everything from scratch. We also provide a plug-and-play codebase for the robot control, teleoperation, data collection, model training, and inference.
Simple Mobile aims to make mobile manipulators more accessible, save you time, and help you get to the **research part** faster.
2
24
110
12,639
Runhan Huang retweeted

Mar 25
Can we learn whole-body mobile manipulation directly from human demonstrations?
Introducing Whole-Body Mobile Manipulation Interface (HoMMI)
Egocentric UMI, 0 teleop -> bimanual & whole-body manipulation, long-horizon navigation, active perception
hommi-robot.github.io
12
72
331
74,724
Runhan Huang retweeted

7 Nov 2025
Meet BFM-Zero: A Promptable Humanoid Behavioral Foundation Model w/ Unsupervised RL👉 lecar-lab.github.io/BFM-Zero…
🧩ONE latent space for ALL tasks
⚡Zero-shot goal reaching, tracking, and reward optimization (any reward at test time), from ONE policy
🤖Natural recovery & transition
7
77
269
81,155
Runhan Huang retweeted

I’ll present GSWorld this morning at TuI1I.48.🥸 I’ll also be at the conference these days. Welcome to come or drop me a message to chat 🫶
28 Oct 2025

Ever want to enjoy all the privileged information in sim while seamlessly transferring to the real world? How can we correct policy mistakes after deployment?
👉Introducing GSWorld, a real2sim2real photo-realistic simulator with interaction physics with fully open-sourced code.
1
4
27
2,845
Runhan Huang retweeted
May 19
🔥Excited to share the first released work from our IEI lab! Congrats to @AnteaWu 🎉
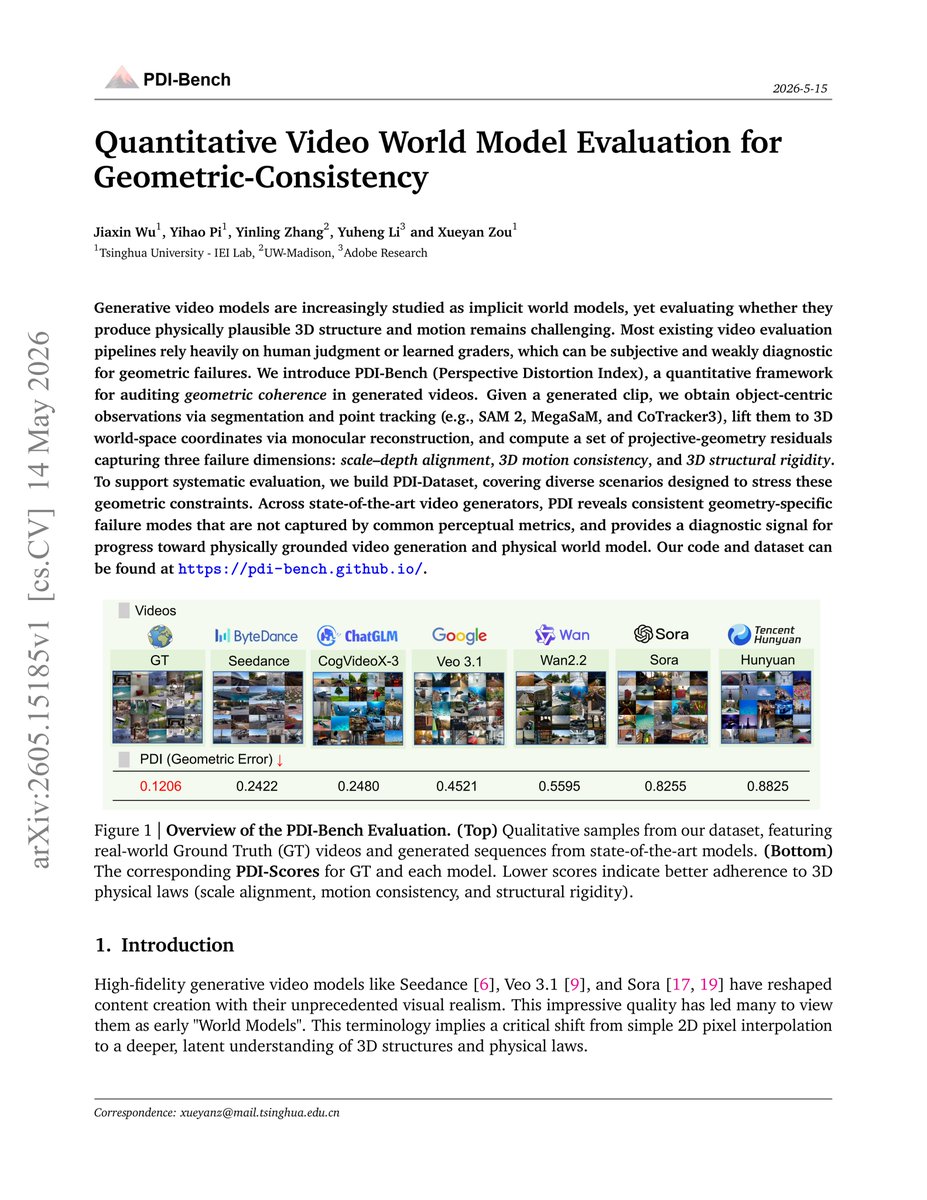
This work is motivated by the lack of quantitative evaluation for physics alignment in video world models. With tools like MegaSam and CoTracker, we can directly reconstruct dynamic 3D scenes, enabling quantitative evaluation of physical alignment.
Both code and data are released — feel free to try it out! It should work, but if it doesn’t, contact @AnteaWu directly : )

We introduce PDI-Bench🤩, a benchmark for quantitatively evaluating geometric consistency in video world model by uplifting 2D video pixel dynamics into 3D space.😀😉🥰
Paper:arxiv.org/pdf/2605.15185
Project Page:pdi-bench.github.io/
@xyz2maureen & @Yuheng120766
1
7
36
9,761

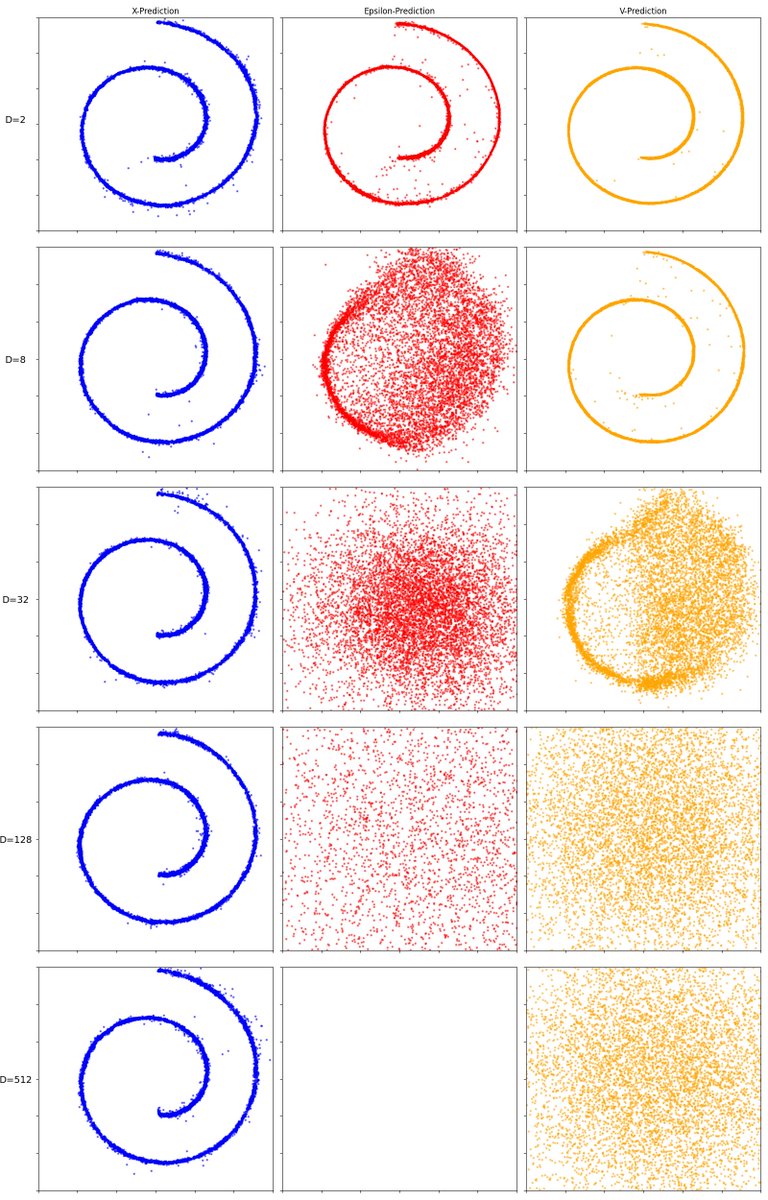
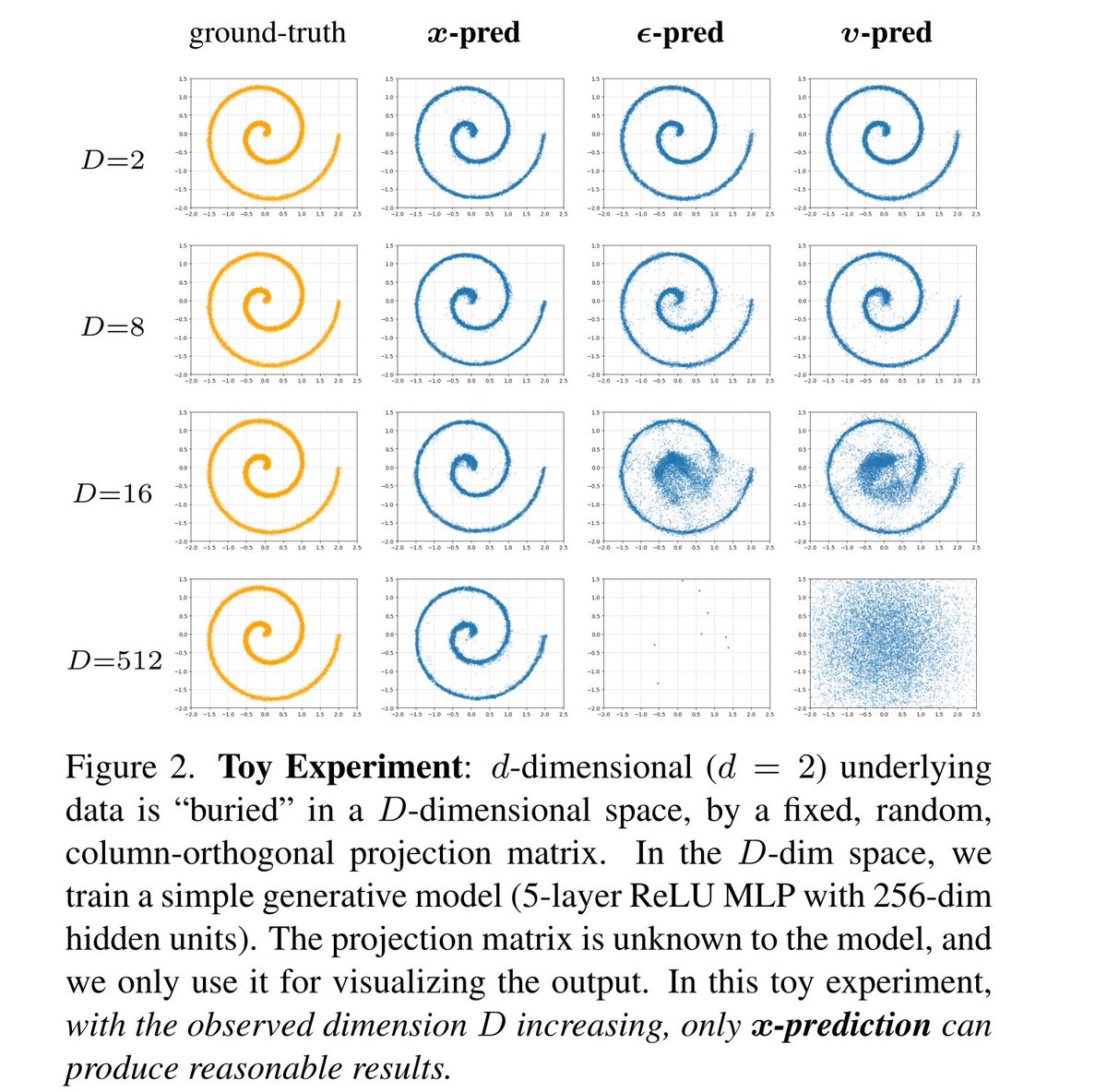
Wrote a repo to reproduce the results.
Welcome to play with: github.com/SUZ-tsinghua/jit_…

2
23
273
71,154
Runhan Huang retweeted

Jun 2
beautiful saliency map
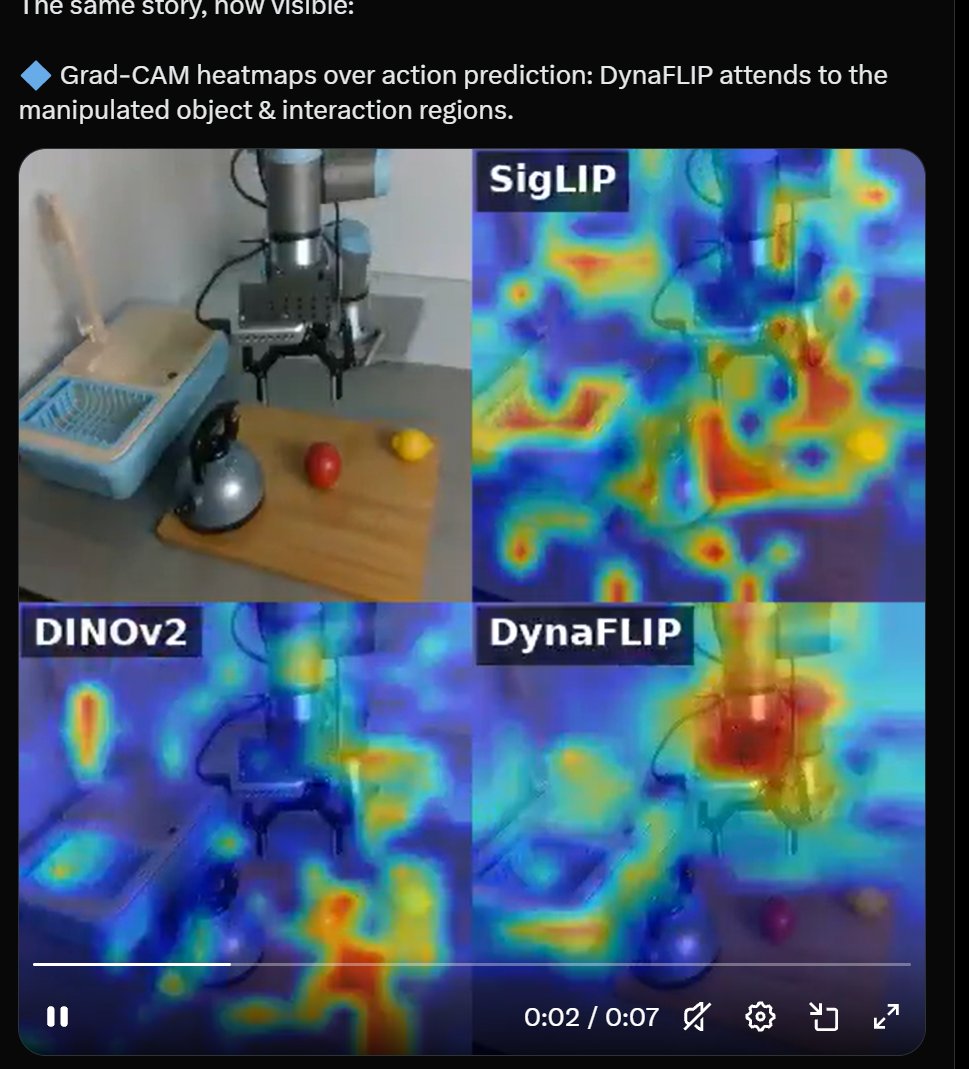

Are you still running your robot policies on vision encoders trained purely on static images?
Nowadays, the standard practice in robot learning is to plug in powerful vision models like CLIP, SigLIP, or DINOv2. This inherits a quiet, convenient assumption: “Let mainstream computer vision handle perception, and the downstream policy will figure out the dynamics.”
But let’s be real for a moment. Is this truly the best we can do?
We introduce DynaFLIP: Rethinking Robotics Perception via Tri-Modal-Dynamics Guided Representation.⬇️
🔷 Dynamics upstream: we push motion understanding into perception.
🔷 Tri-modal-dynamics supervision: image transitions × language × 3D flow, fused via simplex-volume alignment (260K trajectories from robot & human video)
🔷 Transfers everywhere: a visual backbone for diverse policies (MLP, Diffusion Policy, VLA)
🔷 22.5% over the strongest baseline (DINOv2, SigLIP) under real-world OOD
🔷 Open-Source & easy to use
🌐 Website: dynaflip-robotics.github.io
📄 Paper: arxiv.org/abs/2605.30350
💻 Code: github.com/JU-SUK/DynaFLIP
🤗 Hugging Face: huggingface.co/jlee-larr/dyn…
1
6
45
9,878
Runhan Huang retweeted

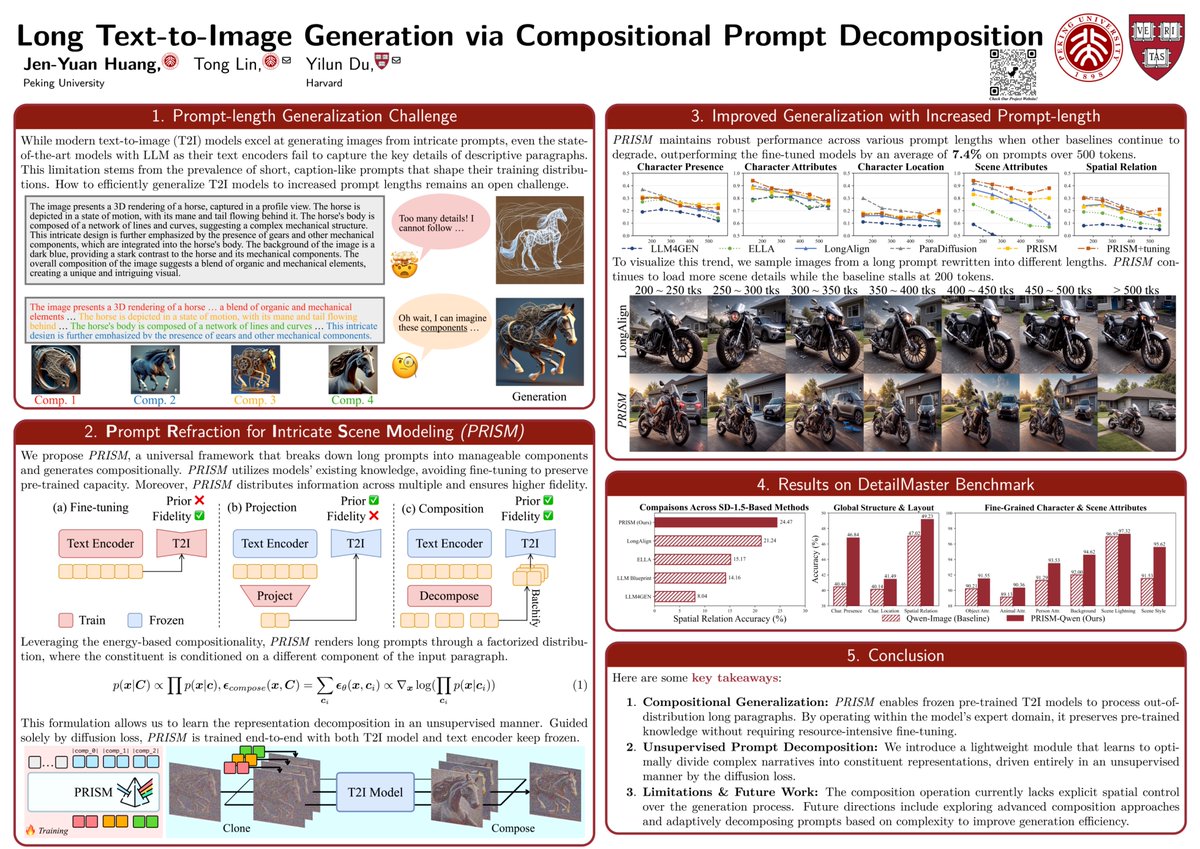
Excited to share our work with @du_yilun! We use compositional generation to improve T2I diffusion models' generalization to longer text prompts.
Our poster will be at @iclr_conf 4/23 10:30 am - 1:00 pm. Come and have a chat on at P4 #3011 Riocentro!!
🏠 jy-joy.github.io/PRISM
6
22
3,334
Runhan Huang retweeted

If you're at #ICRA2026 tomorrow, check out this presentation from the lab of #KempnerInstitute Investigator @du_yilun!
#AI #robotics
Jun 2

Flexible Locomotion Learning with Diffusion Model Predictive Control
Excited to share that our paper has been accepted to #ICRA2026 @ieee_ras_icra!
A diffusion-planning framework for flexible real-world quadruped locomotion. Instead of learning a fixed RL policy or relying on hand-crafted dynamics for MPC, we train a diffusion trajectory prior that jointly predicts future states and actions.
Key Ideas:
Diffusion-MPC: A diffusion planner unlocks flexible locomotion through test-time reward and constraint adaptation
Interactive reward-weighted finetuning enables continual behavior refinement from online environment feedback
Real-world deployment on Unitree Go2 with efficient and adaptive planning
The same planner can adapt at test time to height changes, posture/joint constraints, balancing under external disturbances, energy-aware locomotion, and zero-shot outdoor walking on grass and slopes.
🌐Homepage: flexible-diffusion-mpc.githu…
📖Paper: arxiv.org/abs/2510.04234
🔗Code: github.com/hrh6666/Flexible-…
This work is by @RunhanH, Haldun Balim, @hankyang94 , and @du_yilun.
#ICRA2026 #Robotics #LeggedRobots #RobotLearning #DiffusionModels #MPC #MachineLearning
1
4
934
Runhan Huang retweeted

Jun 2
Jun 2
Flexible Locomotion Learning with Diffusion Model Predictive Control
Excited to share that our paper has been accepted to #ICRA2026 @ieee_ras_icra!
A diffusion-planning framework for flexible real-world quadruped locomotion. Instead of learning a fixed RL policy or relying on hand-crafted dynamics for MPC, we train a diffusion trajectory prior that jointly predicts future states and actions.
Key Ideas:
Diffusion-MPC: A diffusion planner unlocks flexible locomotion through test-time reward and constraint adaptation
Interactive reward-weighted finetuning enables continual behavior refinement from online environment feedback
Real-world deployment on Unitree Go2 with efficient and adaptive planning
The same planner can adapt at test time to height changes, posture/joint constraints, balancing under external disturbances, energy-aware locomotion, and zero-shot outdoor walking on grass and slopes.
🌐Homepage: flexible-diffusion-mpc.githu…
📖Paper: arxiv.org/abs/2510.04234
🔗Code: github.com/hrh6666/Flexible-…
This work is by @RunhanH, Haldun Balim, @hankyang94 , and @du_yilun.
#ICRA2026 #Robotics #LeggedRobots #RobotLearning #DiffusionModels #MPC #MachineLearning
1
5
1,454

Check out our at #ICRA2026 on building flexible locomotion systems through diffusion-based MPC !
Our generative MPC approach allows us to rapidly adapt locomotion policies to constraints such as height, terrain, and joint angles by simply changing the optimized objective.
Jun 2
Flexible Locomotion Learning with Diffusion Model Predictive Control
Excited to share that our paper has been accepted to #ICRA2026 @ieee_ras_icra!
A diffusion-planning framework for flexible real-world quadruped locomotion. Instead of learning a fixed RL policy or relying on hand-crafted dynamics for MPC, we train a diffusion trajectory prior that jointly predicts future states and actions.
Key Ideas:
Diffusion-MPC: A diffusion planner unlocks flexible locomotion through test-time reward and constraint adaptation
Interactive reward-weighted finetuning enables continual behavior refinement from online environment feedback
Real-world deployment on Unitree Go2 with efficient and adaptive planning
The same planner can adapt at test time to height changes, posture/joint constraints, balancing under external disturbances, energy-aware locomotion, and zero-shot outdoor walking on grass and slopes.
🌐Homepage: flexible-diffusion-mpc.githu…
📖Paper: arxiv.org/abs/2510.04234
🔗Code: github.com/hrh6666/Flexible-…
This work is by @RunhanH, Haldun Balim, @hankyang94 , and @du_yilun.
#ICRA2026 #Robotics #LeggedRobots #RobotLearning #DiffusionModels #MPC #MachineLearning
4
62
6,403
Runhan Huang retweeted

May 29
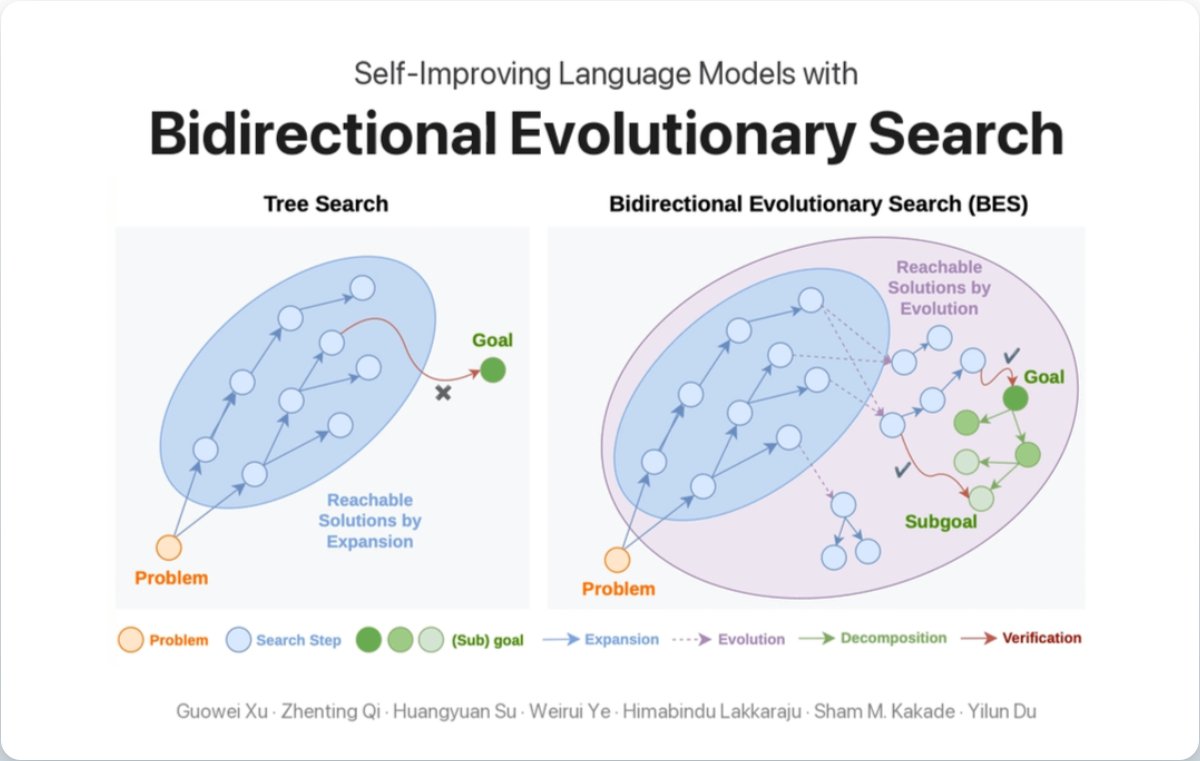
A search framework for stronger LLM reasoning – Bidirectional Evolutionary Search, or BES by @Harvard and @MIT
It combines:
- forward search to create and improve candidate solutions
- backward search to breaks the task into checkable sub-goals
BES can recombine parts of different candidate trajectories using evolution-style operators → Combinationб Deletionб Translocationб Crossover.
This helps to explore solutions that ordinary rollouts are unlikely to reach.
Due to backward the system can recognize partial progress even before the final answer is correct.
The most notable results:
- on MuSiQue multi-hop reasoning, BES improved Llama-3.2-3B-Instruct from 4.0% to 7.0% accuracy (GRPO degraded performance and Tree-GRPO barely helped)
- BES outperformed open-source evolutionary frameworks – OpenEvolve, GEPA, and ShinkaEvolve – on circle packing and Heilbronn convex optimization.
3
18
103
8,429
Runhan Huang retweeted

Jun 1
"Self Improving Language Models with Bidirectional Evolutionary Search"
Most LLM search still works by sampling more rollouts or extending one path at a time.
This paper's bidirectional evolutionary search does it in a smarter way.
It breaks the task backward into smaller verifiable goals, while evolving solutions forward by mixing useful parts from different attempts.
This lets the model find answers that normal sampling and tree search are unlikely to reach.
The gives better post-training and stronger test-time search on hard reasoning and open problem solving tasks.

7
39
215
12,215