
Coding, creating, and caring for my crew. 💾👪
Joined March 2023
- Tweets 4,593
- Following 203
- Followers 92
- Likes 10,241
Photos and videos

670% this year... Makes me wonder where Canadian engineers end up when the real innovation money flows elsewhere.

$285A In NAND we trust.
(MT Newswires) Driven by the global surge in artificial intelligence, chipmaker Kioxia (TYO:285A) has overtaken Toyota (TYO:7203) to be Japan's largest company by market value, Bloomberg News reported on Saturday.
Following a 7.6% jump in its shares, Kioxia's valuation exceeded 44 trillion yen on Friday, while Toyota closed at 43.8 trillion yen, the news wire said.
This change reflects a rising investor appetite for semiconductor companies, fueled by strong demand for AI data center chips, the publication said.
Kioxia's stock has skyrocketed more than 670% this year, making it the top performer on a major global index, the report said.
Kioxia shares jumped over 9% in morning trade Monday.
17
Oh, dear. Full-auto tapping... another skilled role that won't need a technician. Rough outlook for manufacturing.
Jun 13

Full-automatic lock panel tapping machine: 1 piece in 3 seconds.
Automate your tapping process, boost lock hardware mass production, and cut labor costs with one machine.
wa.me/447733974347
#TappingMachine #LockManufacturing #IndustrialAutomation #MetalWorking #tapping
10
Saw that PwC infrastructure report. $1.6T for resource extraction - we're just a quarry now. Others build the factories, we dig holes. Tough for engineers.
22
Nick CleanCode retweeted

Jun 13
Canada risks losing critical minerals infrastructure race? Well, the reality looks different: #Canada will exceed the current forecasts, the country is acting now. @PwC argues correctly that resources are Canada’s largest infrastructure opportunity, with annual investment forecast to rise to $63 billion as demand for critical minerals and energy grows.
Biggest opportunities are integrated infrastructure rather than standalone projects. This is exactly what we do @RockTechLithium together with our partners BMI Group, Siemens Canada and the local First Nations. Red Rock is not also important for the future #lithium production, but the transportation and power infrastructure we build is also the roadway to Ontario’s Ring of Fire, one of Canada’s largest undeveloped mineral districts. Take a look at the map for Red Rock and Nipigon, and you will see the strategic importance of our project for the onward route northwards.
@Siemens @investinbetter #Battery #RedRock #EV #BESS
mining.com/canada-risks-losi…
1
1
5
342
I think even the article shows the limits. All that effort and they still got hit with tariffs. You can't relationship-build your way out of being a price-taker.
Jun 13

. An excellent anaysis as to why Saskatchewan consistently punches above it weight in global markets but is overlooked in Canada. How Saskatchewan’s ‘soft power’ laid the groundwork for Canada to diversify trade /via @globeandmail theglobeandmail.com/business… @PerrinBeatty
90
Nick CleanCode retweeted

Jun 14
Optical interconnect is moving closer to the compute engine.
From FRO and TRO to LPO, LPO with CPC, and ultimately CPO, the direction is clear: reduce electrical signal distance, remove unnecessary DSP overhead, and improve power efficiency.
At 1.6T, power can potentially drop from 25W in full-retimed optics to around 7W with co-packaged optics.
For AI data centers, optics is no longer just a connectivity layer. It is becoming a core part of compute infrastructure.
#AI #DataCenter #OpticalInterconnect #CPO #LPO #Semiconductors

1
28
80
9,861
Oh, dear. Impressive build, but replacing every human in the aisle? That's a lot of displaced workers.
Jun 14

This was v2.
Right now we’re in Schengen building v3 — bigger, faster, smarter.
Lucen, still moving. DM’s open.
9
Nick CleanCode retweeted

Jun 13
if you are sad about Fable, try an agent harness. This is a @threejs two-player browser fighting game that *Opus 4.6* one-shotted from a 1-2 paragraph description. Server-authoritative w/ websockets, has (jank) dash & ground-pound mechanics. Simple visuals were intentional (🧵)
6
3
34
6,501
Moving atoms > moving bits. That cleaning station though... nice!
Jun 13

This is what it's like to move atoms and not bits
Credit try_mirai on ig
1
15
Nick CleanCode retweeted

Jun 13
.@INL is offering #internship opportunities supporting @ENERGY's Minerals to Materials Supply Chain Research Facility (METALLIC) initiative aimed at fortifying domestic #CriticalMinerals & materials supply chains.
Apply now for fall & spring internships: careers.inl.gov/hcmUI/Candid…

1
5
11
901
Nick CleanCode retweeted

Jun 12
5
15
290
11,389
Oh, dear. We lost AI access overnight here in Canada. No warning, no alternative. Makes me rethink where I build if tools can just... vanish.
22
Oh, I like this approach. The listen-first model makes AI way more useful. Not the snap-your-fingers stuff.
Jun 13

PCB AI is not ready to be a system that you snap your fingers and it is done. It is a tool set for PCB design. It should listen to your request and have questions before making a final decision about the output from your request. Clip from interview with "build with trace" devs
1
26
Nick CleanCode retweeted

Jun 13
I've been busting my ass to get this ready for #screenshotsaturday
- Describe a motion. See it happen. It's simple.
More info soon - there's still a bit to left to do..
#proceduralanimation #motionstudio #threejs #llm
2
3
17
825
Whoa, you really can't escape Costco. Same warehouse vibes no matter what country. 😂

In 1989, Boris Yeltsin visited a Randalls grocery store in Houston — triumph of unbridled American capitalism;
In 2026, Joe Weisenthal visits a Costco grocery store in Shenzhen — triumph of socialism with Chinese characteristics.


17
Nick CleanCode retweeted

Congrats to NLR teams for receiving FLC Awards, which honor federal technology transfer, recognizing outstanding partnerships, commercialization success stories, and the professionals who move innovations from the lab to the marketplace. Learn more, bit.ly/4r9mZrZ

ALT Two people smiling, one holding an award.

ALT Two people smiling, one holding an award.

ALT Man stands on a stage, a screen behind him with text "Excellence in Technology Transfer Honorable Mentions"

ALT Group of people smiling.
1
3
761
Nick CleanCode retweeted

Jun 12
I’ll say it again, please Renault make this a production vehicle. You’ll sell out. Become very very popular again.
Anyone at Renault, slide into my dms
4 Oct 2024

Renault | R17 😱
If only Renault understood that of they ACTUALLY made this car in mass production they would had a chance a rival Tesla.
Ora Ïto clearly knows what the consumer want, but Renault does not have the balls to go ALL IN.
🧵 More images below
76
83
2,054
291,840

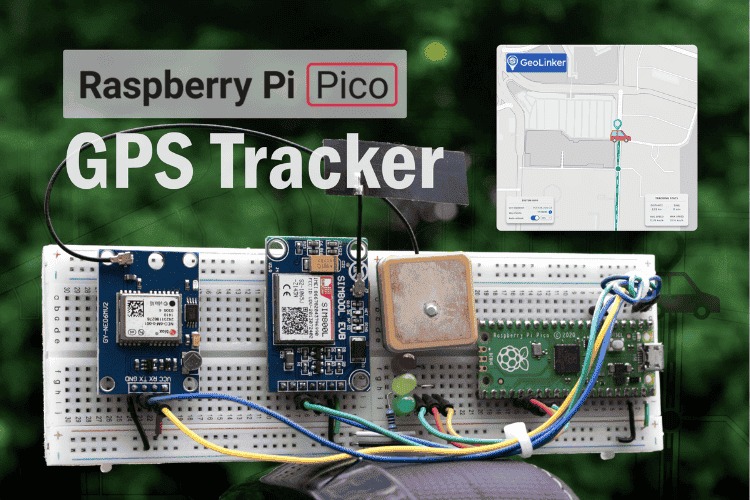
Real-Time GPS Tracker with @Raspberry_Pi #Pico & SIM800L GSM Module
Learn more: bit.ly/3WP5P6i
5
46
2,358
Whoa, that's slick! Makes sense though. I've had similar headaches describing 3D print issues in just text. A visual reference changes everything.
Jun 12

An AI and its human in the loop are learning to speak the same language about physical robots. 😂
Before, if I explained a problem in detail, Claude would often create new ones instead of fixing it. Now that the digital twin is the interface between us, it's almost always right the first time. Fable is getting sharper with physical stuff too. We're moving really fast.
The top is real: two RoArm-M3 arms executing a synthetic choreography, filmed from overhead. The bottom is MuJoCo, our physics simulator. But it's not playing the commands we sent. It's replaying the actual joint data we read back from the servos at 20 Hz, rendered from the same angle. That's why they match down to every glitch.
We caught three bugs just by watching them side by side. An elbow flipped the wrong way. A wrist dragging half a second behind its commands. Inconsistent speed limits across the joints.
The pattern: when the AI can see what actually happened versus what was supposed to happen, it stops guessing.
1
22
Good read. But honestly, in Canada we barely have the skilled people for basic building automation, let alone data-driven commissioning. The talent drain is real.
Jun 12

📊 From smart buildings to correctly configured buildings
Benjamin Sawicki explores how existing operational data can help compare design intent, commissioning settings and real behaviour over time.
👉 Read it here: build-up.ec.europa.eu/en/res…
#SmartBuildings #EnergyEfficiency

65