
10h
We built a digital touchpoint in San Francisco that lifted engagement by 38% — tailored to the client, tested for conversion, and launched with clear intent. Read the case vignette to see how we did it. wix.to/2IPXrOe #SFtech

3

Jun 13
【Tech Events in SF Bay Area from 6/13 to 6/27】
I have summarized the 171 Tech Events in SF from 6/13 to 6/27 in a Air Table, and I will share it with you. If you have any other exciting tech events to recommend, please feel free to share them on the comment:)
Event list👇️(There are tabs for AI events,VC and Investor events and Hackathon)
kyosuketogami.substack.com/
- 80 Ai Event
- 3 VCs & investors Event
- 11 Hackathon Event
I also created a curated list of tech events for New York — check it out here!
Access the full event calendar:
airtable.com/appPp8zf9eoKB9I…
I would greatly appreciate it if you could share or like this with others in the SF & NY community.
#NYTech #SFTech #TechEvents #StartupCommunity #AIEvents #VentureCapita #Hackathon #FoundersNetwork #NetworkingEvents #Innovation

1
132



Jun 10
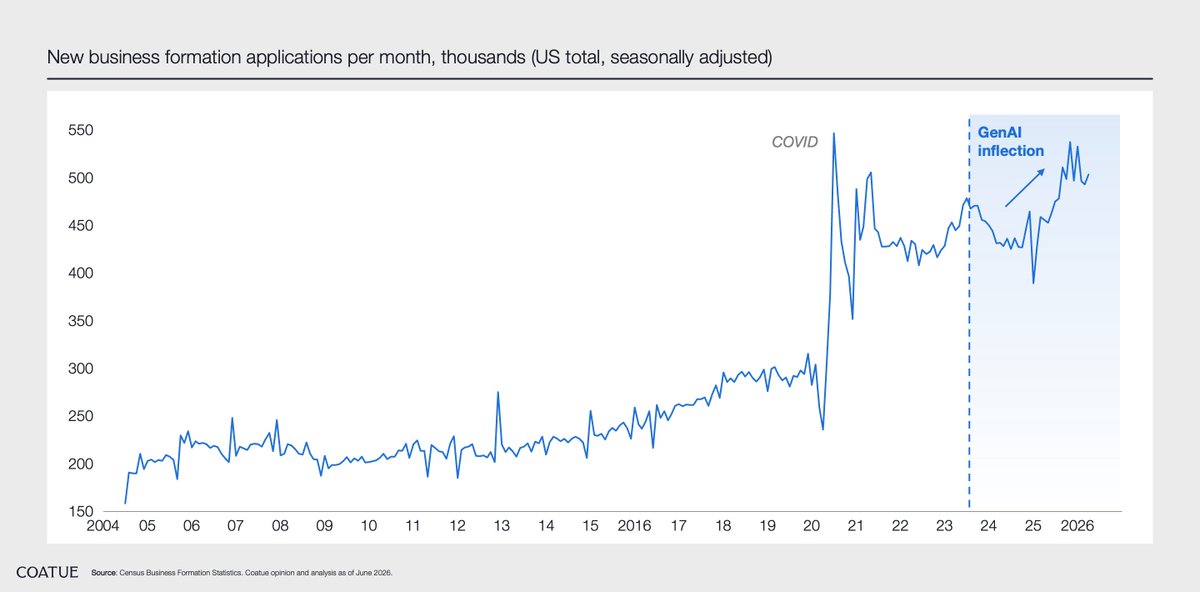
Patience just got repriced.
@databricks Data AI Summit (June 15–18) arrives as AI leaves the pilot era and enters the accountability era. More than 30,000 data and AI leaders will gather in San Francisco to compare what is actually working in production. @alighodsi, @matei_zaharia, and @rxin helped build the infrastructure behind modern data and AI, while operators from @PepsiCo, @Nasdaq, and a wave of AI-native companies including @LangChain, @llama_index, @glean, @retool, @crewAIInc, and @DecagonAI bring the reality check: outcomes matter more than demos. As budgets tighten and expectations rise, the conversation has shifted from experimentation to execution.
The next AI winners won’t be the companies with the most pilots, they’ll be the ones turning data into production systems that compound.
#dataai #enterprisetech #aibuilders #databricks #sftech
1
1
205

📚 @saturdayrobotic Robotics & World Models Reading Club 12: @QuantingX7410 on Dexterity — 06/13
👉🏻RSVP: luma.com/5w7c1t2a
Keynote: @DanielXieee (Co-Founder, @QuantingX7410 YC W26): Dexterity Benchmark We Need
2026 is the year of dexterity claims — frontier labs advertise “human-level” and “dexterity-first” manipulation, yet this spring alone three separate benchmark initiatives launched from industry, academia, and standards bodies. None are comparable. Definitions remain vague, taxonomies cover only narrow slices of manipulation, and demo reels stand in for protocols. The rigorous verification and reproducibility machinery that worked for vision, NLP, and even 1940s occupational therapy has yet to arrive in robot manipulation. This talk traces a century of attempts — from the Purdue Pegboard to today’s fragmented benchmarks — and argues that every piece of a proper dexterity benchmark already exists, just scattered across communities that rarely talk. Highly interactive: bring your own definition of dexterity and we’ll see whether the room converges any better than the field has.
Pre-Readings
Definitions & taxonomies:
Napier, The Prehensile Movements of the Human Hand, JBJS 1956 Elliott & Connolly, A Classification of Manipulative Hand Movements, Dev. Med. Child Neurol. 1984 Cutkosky, On Grasp Choice, Grasp Models, and the Design of Hands, IEEE T-RA 1989 Ma & Dollar, On Dexterity and Dexterous Manipulation, ICAR 2011 Bullock et al., A Hand-Centric Classification of Human and Robot Dexterous Manipulation, IEEE ToH 2013 Dafle et al., Extrinsic Dexterity: In-Hand Manipulation with External Forces, ICRA 2014 Feix et al., The GRASP Taxonomy of Human Grasp Types, IEEE THMS 2016
Human dexterity assessment:
Tiffin & Asher, The Purdue Pegboard, J. Applied Psychology 1948 Mathiowetz et al., Box and Block Test, AJOT 1985 Light et al., SHAP: Southampton Hand Assessment Procedure, Arch. PM&R 2002
Robot-hand dexterity benchmarks:
Zhou et al., 50 Hand Dexterity Benchmarks (HD-marks), 2020 Coulson et al., The Elliott and Connolly Benchmark, IEEE-RAS Humanoids 2021 Elangovan et al., Modular Dexterity Test Board, 2022 Liconti, Zhou, et al., POMDAR: A Benchmark of Dexterity for Anthropomorphic Robotic Hands, arXiv:2604.09294, 2026
Task suites & object kits:
Calli et al., YCB Object and Model Set, ICAR 2015 Kimble et al., Benchmarking Protocols for Small Parts Robotic Assembly (NIST task boards), IEEE RA-L 2020 Heo et al., FurnitureBench, RSS 2023 Luo et al., FMB: A Functional Manipulation Benchmark, IJRR 2024 Liu et al., LIBERO, NeurIPS 2023; Nasiriany et al., RoboCasa, RSS 2024
Evaluation methodology & infrastructure:
Li et al., SimplerEnv: Evaluating Real-World Robot Manipulation Policies in Simulation, CoRL 2024 Zhou et al., AutoEval: Autonomous Evaluation of Generalist Robot Policies in the Real World, arXiv:2503.24278, 2025 Atreya, Pertsch, et al., RoboArena: Distributed Real-World Evaluation of Generalist Robot Policies, CoRL 2025 Agia et al., CUPID: Curating Data your Robot Loves with Influence Functions, CoRL 2025 Chen, Kimble, et al., ManipulationNet, arXiv:2603.04363, 2026
Location: San Francisco (Downtown) (tentative)
Time: Saturday, June 13, 2026 | 2:00 PM – 5:00 PM
Hosts: @junfanzhu98, @aurorafeng_01
Agenda
2:00 PM — Doors open & social 🍓 Unlimited strawberries (official Reading Club fruit!)
2:30 PM — Keynote by @DanielXieee (@QuantingX7410)
4:00 PM — Q&A open-floor roundtable (10–20 min per topic; spotlight any paper you’d like to highlight)
Come ready to discuss what “dexterity” actually means, how to build rigorous and comparable benchmarks, hand-centric taxonomies, robot manipulation evaluation, and the missing reproducibility layer for embodied AI!
Past sessions brought together researchers & engineers from Boston Dynamics, Google DeepMind, NVIDIA, Stanford, UC Berkeley, Dyna, Physical Intelligence, Tesla, Generalist, Rhoda AI, and leading Bay Area robotics startups.
👉🏻RSVP: luma.com/5w7c1t2a
#Robotics #WorldModels #EmbodiedAI #Dexterity #RobotManipulation #SFTech
3
12
771

Didit CTO Alejandro Rosas talks about qualities he looks for while hiring & recent hiring initiatives
#aiengineering #hiring #founder #sftech
3
327

Jun 5
Just got back from another week in SF soaking up the AI energy.
The shift feels real.
Agentic workflows are eating everything. Founders aren’t debating frontier models anymore. They’re picking the right one per task and obsessing over MCP endpoints.
Physical AI and robotics are exploding with real deployments.
Everyone’s hunting forward-deployed engineers who can actually ship agents in production.
Mood is pure urgency and inspiration.
Consumer AI still feels underbuilt next to the B2B infrastructure wave everywhere.
What’s the biggest blind spot you’re seeing in the agentic wave?
Bay Area builders and founders. Let’s connect.
#AI #AgenticAI #SFTech #Robotics

1
3
112
📚🍓@saturdayrobotic Robotics & World Models Reading Club 10: Bringing Robots to Life — Learning Humanoid Instincts from the Body Up | San Francisco 0530
👉🏻RSVP: luma.com/czz76qe1
Keynote by @HaochenShi74 (Final-year CS PhD at @Stanford, co-advised by Karen Liu & Shuran Song)
Recent advances in robotics have focused on scaling data and models, yet today’s robots still lack basic physical competencies like a human toddler, the ability to move through, learn from, and safely interact with the real world. I argue that bringing a robot to life begins not with larger models but with well-designed hardware and a small set of foundational instincts, including motor skills, compliant interaction, and exploration. I present ToddlerBot, a low-cost, open-source, ML-compatible humanoid platform that serves as both a physical body and a research instrument, along with three learned instincts built directly on it. I highlight systems for whole-body locomotion across challenging terrain using hands, knees, and elbows, compliant physical interaction using only motor current signals, and real-world skill learning guided by a robotic teacher. Together, these contributions represent a first step toward developing humanoid robots from the body upward through a progression of foundational instincts, a path toward bringing a robot to life.
Pre-Readings
Minimalist Compliance Control: minimalist-compliance-contro…
A plug-and-play method that enables compliant behavior using only motor current or voltage signals, without force sensors, current control, or learning.
Locomotion Beyond Feet: locomotion-beyond-feet.githu…
A comprehensive system for whole-body humanoid locomotion across extremely challenging terrains.
Robot Trains Robot: Automatic Real-World Policy Adaptation and Learning for Humanoids: robot-trains-robot.github.io…
A novel framework where a robotic arm teacher actively supports and guides a humanoid student.
ToddlerBot: Open-Source ML-Compatible Humanoid Platform for Loco-Manipulation: toddlerbot.github.io/
A low-cost, open-source humanoid robot platform designed for scalable policy learning and research in robotics and AI.
Location: San Francisco (Downtown)
Date & Time: Saturday, May 30, 2026 | 2:00 PM – 5:00 PM
Hosts: @junfanzhu98 & @aurorafeng_01
Agenda
2:00–2:30 PM Door opens networking Unlimited strawberries 🍓 (official Reading Club fruit), food & beverages
2:30–4:00 PM Keynote by Haochen Shi
4:00–5:00 PM Q&A open-floor roundtable
Join the Discord community: discord.gg/WH7DrTHRXK
Follow Saturday Robotics: x.com/saturdayrobotic
@saturdayrobotic is a high-signal reading group for AI researchers & builders pushing the frontiers of robotic world models, WAMs, and embodied intelligence. Past sessions brought researchers & engineers from Boston Dynamics, Google, NVIDIA, Stanford, UC Berkeley, CMU, Dyna, ByteDance, Tesla, Generalist, Rhoda AI, and leading Bay Area robotics startups.
Come ready to discuss humanoid instincts, embodiment-first robotics, compliant control, and the path toward truly alive robots.
👉🏻RSVP: luma.com/czz76qe1
#Robotics #WorldModels #EmbodiedAI #Humanoid #SFTech
1
13
551

📸 We hosted @lyft’s Yuko Yamazaki at our SF office for a fireside chat on leading with empathy in the AI era.
At Crusoe, we’re committed to creating opportunities for our team to learn from industry leaders. We're hiring: 🔗 crusoe.ai/careers?utm_campai…
#CrusoeCulture #SFTech

2
10
664
🤖📚 @saturdayrobotic Robotics & World Models Reading Club 09: CVPR Warm-up & Founders Spotlight — DeltaWorld VisuoTactile — San Francisco
👉🏻RSVP: luma.com/wooiz0bf
Keynote 1: @tommiekerssies (@Amazon Frontier AI & Robotics), A Frame is Worth One Token: Efficient Generative World Modeling with Delta Tokens.
deltatok.github.io/
Anticipating diverse future states is a central challenge in video world modeling. Discriminative models give deterministic averages, while generative ones are too expensive. This talk introduces DeltaTok — a tokenizer that turns VFM feature differences between frames into a single continuous “delta” token — and DeltaWorld, a generative world model that operates on these tokens to efficiently predict diverse, plausible futures. Video collapses from 3D spatio-temporal to compact 1D sequences (1,024× token reduction at 512×512 resolution), enabling tractable multi-hypothesis training and diverse predictions in one forward pass — 35× fewer parameters and 2,000× fewer FLOPs than prior generative models.
Keynote 2: @a1SuperOnion (@FactoryIntelC), ManiFeel.
ManiFeel benchmarks and understands visuotactile manipulation policy learning at scale. Pure vision struggles in occlusion, low-light, or contact-heavy tasks, but touch provides critical force distribution and geometry. This first large-scale reproducible benchmark covers 9 simulation tasks real-world validation across exploration (visual degradation), insertion (contact-intensive), and screwing (dexterous). It compares Vision-only vs. Vision TacRGB (GelSight-style) vs. Vision TacFF (force fields), four tactile encoders, and three policy architectures on Isaac Gym TacSL, validated on Franka Panda GelSight. Key result: visuotactile policies dramatically outperform vision-only — especially in contact-heavy and vision-limited scenes — with strong sim-to-real consistency and reactive recovery from perturbations.
Pre-Readings
TiTok: lnkd.in/gh2Xc95z
DINOv3: lnkd.in/guy-PbZ3
Back to the Features: DINO as a Foundation for Video World Models: lnkd.in/gaD5m-4q
ManiFeel: Benchmarking and Understanding Visuotactile Manipulation Policy Learning lnkd.in/gnU4cgab
San Francisco (Downtown)
Saturday, May 23, 2026 | 2:00 PM – 5:00 PM
Hosts: @junfanzhu98, @aurorafeng_01, @zoeytzh
Agenda
2:00 PM — Doors open networking
Unlimited strawberries (official Reading Club fruit!)
2:30 PM — Keynotes by Tommie Kerssies & Arjun Subramaniam
4:30 PM — Open-floor roundtable Q&A
Come ready to discuss efficient generative world modeling, visuotactile policy learning, multi-modal embodied intelligence, scaling robotic world models, and the road to truly dexterous hands!
Past sessions brought researchers & engineers from Boston Dynamics, Google DeepMind, NVIDIA, Stanford, Berkeley, Dyna, Generalist, Tesla, Rhoda AI, leading Bay Area robotics startups.
👉🏻RSVP: luma.com/wooiz0bf
#Robotics #WorldModels #EmbodiedAI #SFTech #CVPR #VisuoTactile
2
26
1,442
🤖🍓📚 Robotics & World Models Reading Club 08 — San Francisco @saturdayrobotic
👉 RSVP here: luma.com/qoxioge7
Core Theme: Embodied Human Data as the “Internet of Motion and Behavior” 🚀
Keynote: @ryan_punamiya (@NVIDIARobotics GEAR/ @GeorgiaTech)
Vision-language models had the entire internet. Robotics is still stuck with expensive teleoperation.
New paradigm: Embodied human data (egocentric videos large-scale behavior) as the “Internet of Motion” for robots.
In this talk, Ryan will talk about some of the recent works in learning from egocentric human data, large-scale human pre-training, human-robot co-design and world modeling from human experience. And conclude with some future directions and food for thought in this exciting new direction.
📍 San Francisco (Downtown)
🗓 Saturday, May 16, 2026 | 2:00 PM – 5:00 PM
Hosted by @junfanzhu98 & @aurorafeng_01 @neuralmotion
Pre-Readings 🔥
Learning Dexterous Manipulation from Egocentric Human Videos arxiv.org/abs/2410.24221
Scaling Robot Learning with Human Behavior Priors arxiv.org/abs/2509.19626
Cross-Embodiment Policy Learning via Representation Alignment arxiv.org/abs/2509.04443v1
Human-Robot Co-Design for Scalable Data Collection arxiv.org/abs/2512.22414
World Models from Human Experience arxiv.org/abs/2602.16710
Ego-Exo Transfer arxiv.org/abs/2505.21864
Internet-Scale Human Motion Pretraining for Robotics arxiv.org/abs/2604.07607
Learning Generalist Robot Policies from Human Demonstrations arxiv.org/abs/2602.06949
Come ready to discuss cross-embodiment, scaling laws for motion data, and building the real “Internet of Motion”! 💡
Agenda
2:00 PM — Doors open networking 🍓 Unlimited strawberries, food & drinks 😋 (our official Reading Club fruit!)
2:30 PM — Keynote by Ryan Punamiya
3:30 PM — Open-floor roundtable deep Q&A
Zoom YouTube TBD (recording volunteers welcome!)
Past sessions brought together researchers & engineers from Boston Dynamics, Google, NVIDIA, Stanford, UC Berkeley, CMU, Tesla, Rhoda AI, Dyna, Generalist, Meta FAIR, & top Bay Area robotics startups.
Join Discord: discord.gg/WH7DrTHRXK
👉 RSVP: luma.com/qoxioge7
#Robotics #WorldModels #EmbodiedAI #ReadingClub #SFTech #HumanData #Egocentric
4
15
1,068

Big news: Anuma is officially here! 🚀
We're hosting a small gathering this Thursday in San Francisco as we celebrate the launch of Anuma.
Come through for light bites, drinks, and a first look at what we’ve been building. 🥂
The details:
📍 San Francisco
📅 Thursday, Apr 30 | 6:30pm
✨ Demos, drinks, & community vibes
partiful.com/e/n8MOWwbQ72l6U…
#Anuma #TechLaunch #SFTech #ArtificialIntelligence #1HotelSF
5
9
29
3,066

Apr 24
Beautiful weather to build #SFBayArea, #SiliconValley, #SFTech @fdotinc @tash_2s
Verify at: verda.ai/EyFnHb

1
5
89

So happy to be connecting with other women founders here in SF! ☕️
Looking forward to more of these conversations.
@yiyafuture @kaitan_journey @joecyzhang
#SFtech #WomenInTech #Founders #FounderLife

1
7
111

Apr 14
Turns out, putting a group of female founders in a suite at a @warriors game does exactly what you’d hope.
Less “networking,” more real conversation.
Thanks @TriNet @humaninteresthq for hosting us at Chase Center 🏀
More like this soon!
#WomeninAI #SFTech #WomenInTech



1
3
96
The best part of a conference? The conversations after the panels 🥂
Join us Apr 9 with @HumanXCo for a high-intent happy hour — light prompts, real connection, zero agenda.
📅 4–6 PM | @Wine_Down_SF
📷 RSVP: luma.com/2w192fpd
#WomenInAI #HumanX2026 #SFTech #WomenInTech
1
3
124

Apr 7
We teamed up with @Hanwha_Official AI Center for their first hackathon.
Teams formed fast, builders helped each other, and strong projects shipped in hours:
Congrats to the winning teams! Bill-ingual, FraudLens & FinFix
(built with @MiniMax_AI , @n8n_io , @Lovable & @crossmint )
Here at AI valley we love creating rooms where real building happens.
#aivalley #hackathon #fintechai #sftech


1
6
144

Apr 4
🚨 BREAKING: Waymo vehicles halted during a San Francisco power outage, stranding passengers. One FSD user reported the AI avoided blocked intersections, while their family noted navigation issues. #SFTech #AutonomousVehicles
1
20
790

Mar 26
It’s always great to see the SF 🌇 AI community coming together. Tonight I’m joining the @SkyPilot_org and @CoreWeave crews for a deep dive into open-source AI infra.
Beyond the tech, I'm
looking forward to connecting with fellow builders.
#SFTech #BuildInPublic #AI #SkyPilot
1
4
86