
An electron-density point-cloud framework for robust protein-ligand interaction prediction
1. E-CloudBind reframes protein–ligand affinity prediction around electron-density point clouds rather than relying on sub-ångström atomic coordinates, aiming to stay accurate when structures are low-resolution or predicted (e.g., AlphaFold) and therefore noisy.
2. Key idea: replace hard distance cutoffs for “contacts” (e.g., within 5 Å) with density-aware Gaussian “electron clouds”, where interactions are defined by overlap/isosurface intersection, yielding a more resolution-agnostic interaction graph.
3. The framework explicitly splits chemistry into two complementary channels: non-covalent interactions from 3D electron-cloud point clouds, and covalent structure from intrinsic molecular graphs (bond topology), then fuses them for affinity regression.
4. Ligand electron density is obtained via semi-empirical quantum chemistry (GFN2-xTB), while protein pockets use a van der Waals radius-guided multivariate Gaussian sampling strategy as a physically motivated proxy that is far cheaper than full QM density.
5. Architecture highlights: K-means clusters point clouds into atom-aligned local regions; a point-cloud encoder (3D-GCN-style deformable kernels) learns local non-covalent patterns (e.g., H-bonds, π-stacking, van der Waals complementarity); a heterogeneous GNN encodes covalent graphs; a multi-bond fusion module integrates both.
6. On PDBbind 10-fold CV, E-CloudBind reports MAE 1.059 and Pearson 0.667, outperforming representative sequence-based (PSICHIC), graph-based (SIGN), and structure-based (DMFF) baselines, and also comparing favorably to recent structure-centric methods (EHIGN, Boltz-2, FlowDock) under the same protocol.
7. Robustness to experimental resolution: when regressing absolute error vs. crystallographic resolution, E-CloudBind shows a much flatter slope (0.017) than baselines (0.053–0.065), with a non-significant trend (p = 0.703), indicating reduced sensitivity to declining structural quality.
8. Robustness to structure source shifts: swapping experimental proteins with AlphaFold2 models causes only a small performance change for E-CloudBind (MAE 0.042; Pearson −0.004), while coordinate-dependent baselines degrade more (e.g., DMFF MAE 0.187; Pearson −0.093).
9. Out-of-distribution testing built from DAVIS via combinatorial partitioning by protein/ligand complexity shows tighter error dispersion for E-CloudBind (lowest median deviation), with stable performance across increasing protein Relative Contact Order and ligand Bertz complexity.
10. Practical and interpretability results: attention maps highlight polar ligand atoms and key pocket regions consistent with known interaction motifs; large-scale screening on 80,383 ZINC molecules against PBP1A, SARS-CoV-2 Mpro, and BCL-2 uses docking for follow-up, plus BCL-2 candidate assessment with synthesizability metrics and explicit-solvent MD (400 ns) suggesting stable binding for selected hits.
💻Code: github.com/Liuyujian0408/DPI ; doi.org/10.5281/zenodo.19851…
📜Paper: doi.org/10.1038/s41467-026-7…
#ComputationalBiology #DrugDiscovery #ProteinLigand #BindingAffinity #GeometricDeepLearning #GNN #PointCloud #ElectronDensity #VirtualScreening #AlphaFold

2
23
1,366

Jun 13
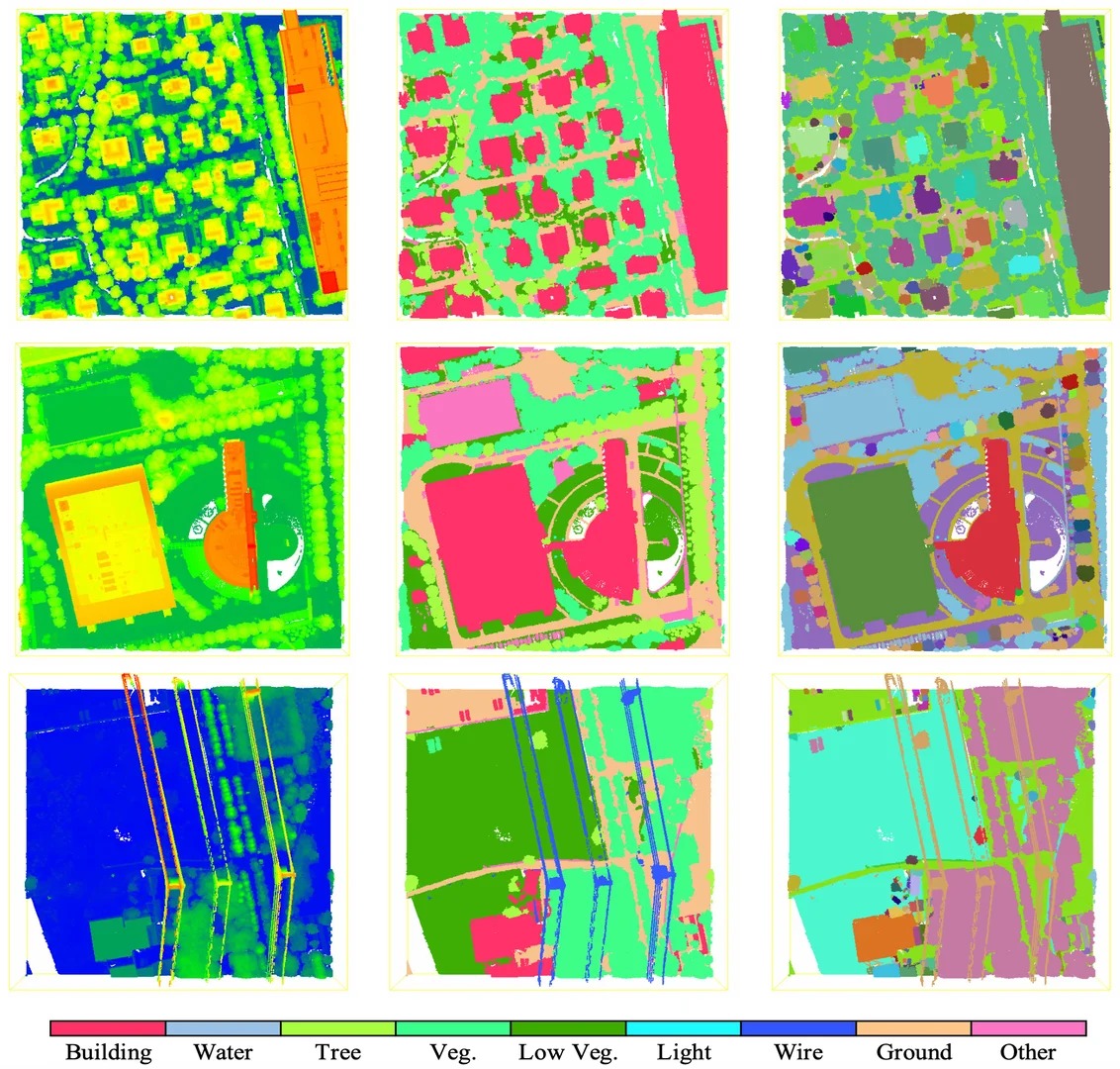
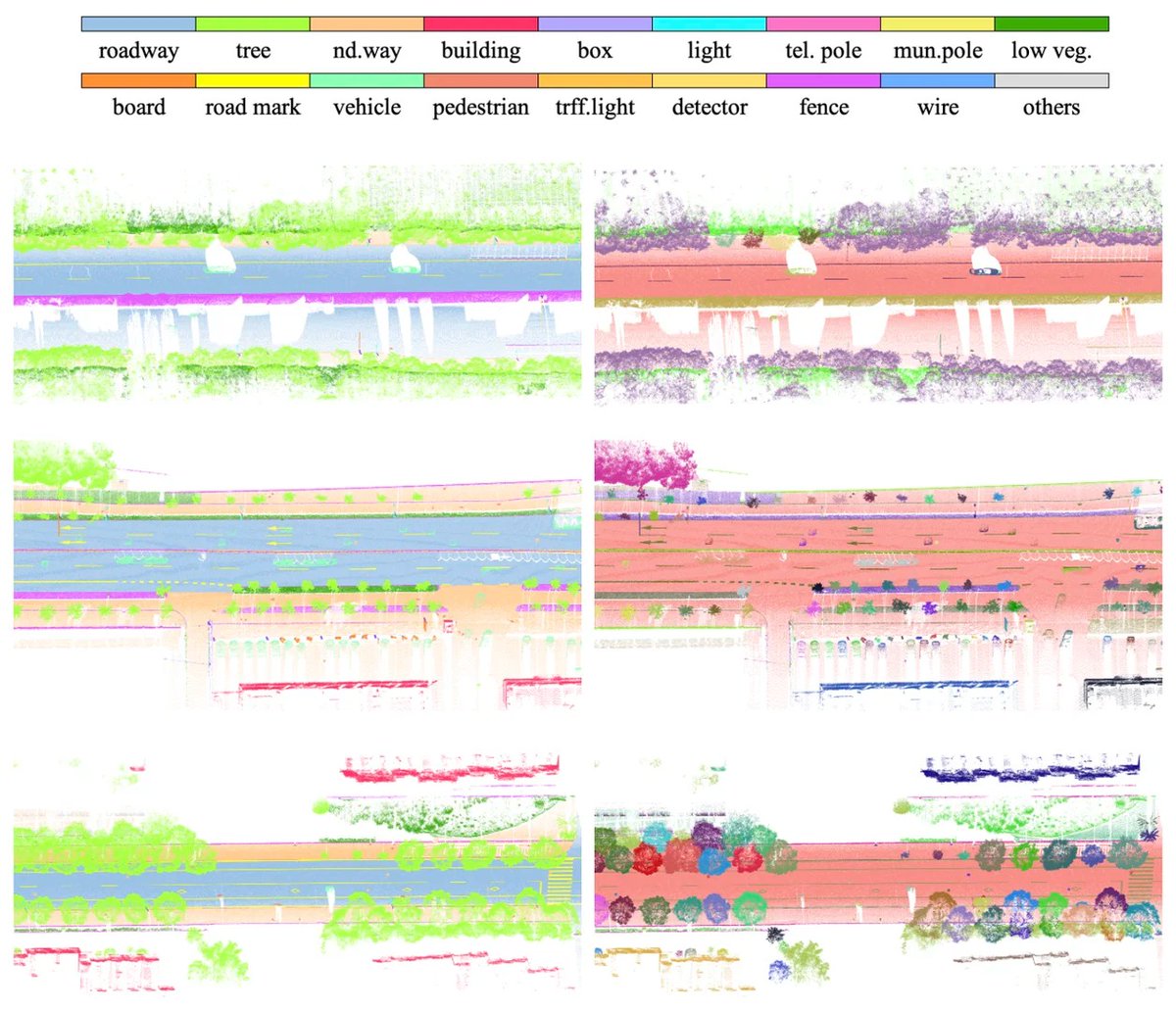
City-Scale LiDAR Semantic & Instance Segmentation Dataset 🏙️
3D point cloud segmentation friends, tired of small or messy outdoor datasets that wreck model generalization? Say hello to WHU-Urban3D—6️⃣B annotated points, just published in ISPRS Journal! 🏆
Why we need it:
Previous datasets were either indoor, small, or poorly labeled. WHU-Urban3D fills the gap for real, complex urban scenes. 💪
🌟 WHU-Urban3D Highlights
1️⃣ Massive scale & full coverage 🏙️ Shanghai & Wuhan, airborne ALS (>3.2M m²) mobile MLS (>6.5 km), full urban 3D scene coverage
2️⃣ 6 billion precise labels 🏷️ 30 classes: buildings, vehicles, pedestrians… perfect to feed deep learning models
3️⃣ Rich attributes 🛠️ XYZ intensity, echo counts… multi-dimensional features boost model generalization 📈
4️⃣ Multi-modal fusion 📷 MLS panoramic images included for cross-data learning
💡 Applications: Intelligent transport, urban planning, AR/VR… unleash your models! 🔥
🔗 Open access
Dataset: whu3d.com/
Paper: sciencedirect.com/science/ar…
#PointCloud #DeepLearning #WHU #OpenDataset #RemoteSensing #ComputerVision #3DSegmentation #Research #AI

23

Jun 12
That Technology works 60% on the Chip can delay 20% of IT to the lenses, for sync purposes but No steady adressment. That system can do that while the wide Angle does construct virtual 3D Pointcloud Points. Super important. The system vm's with the camera Chip, the capturing
1
8

Jun 11
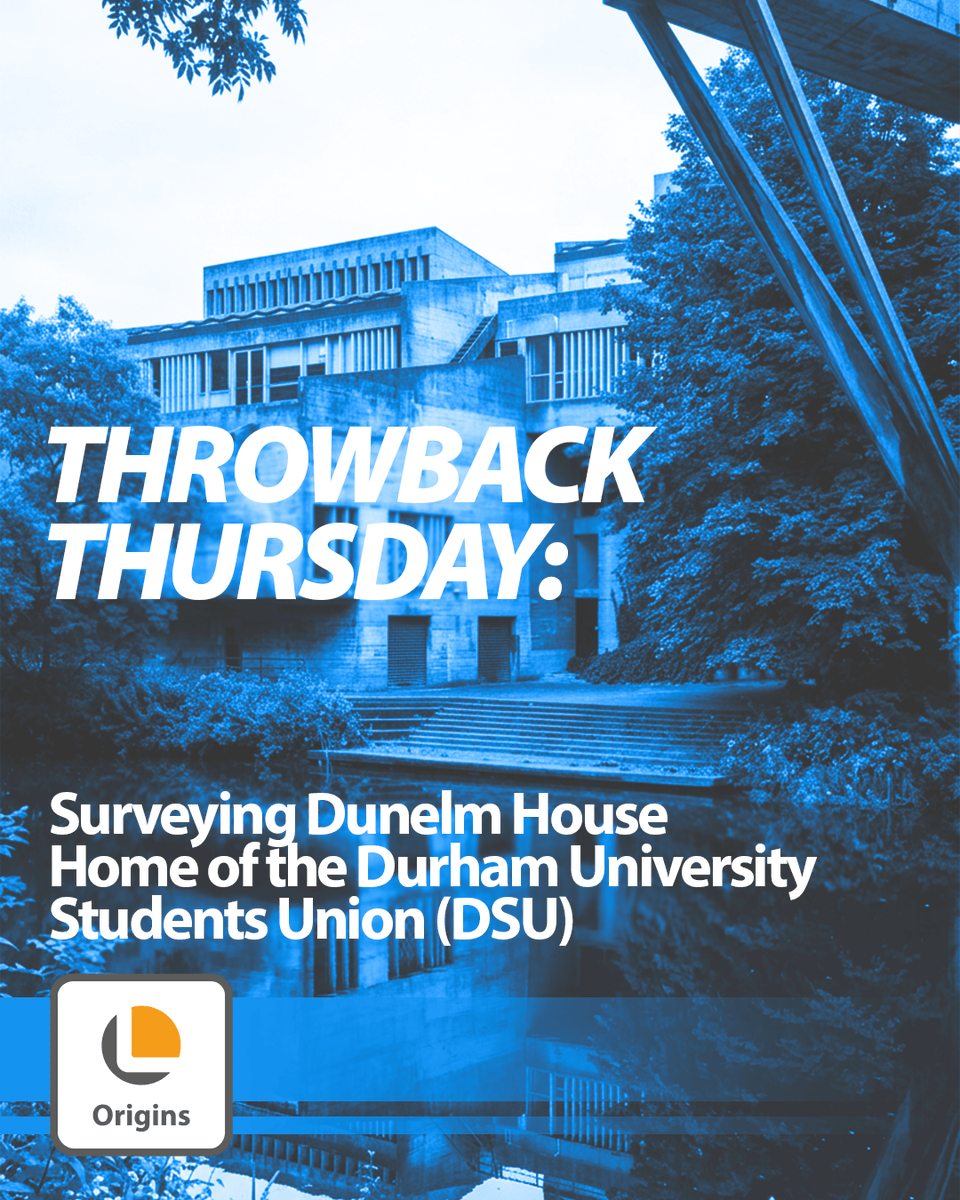
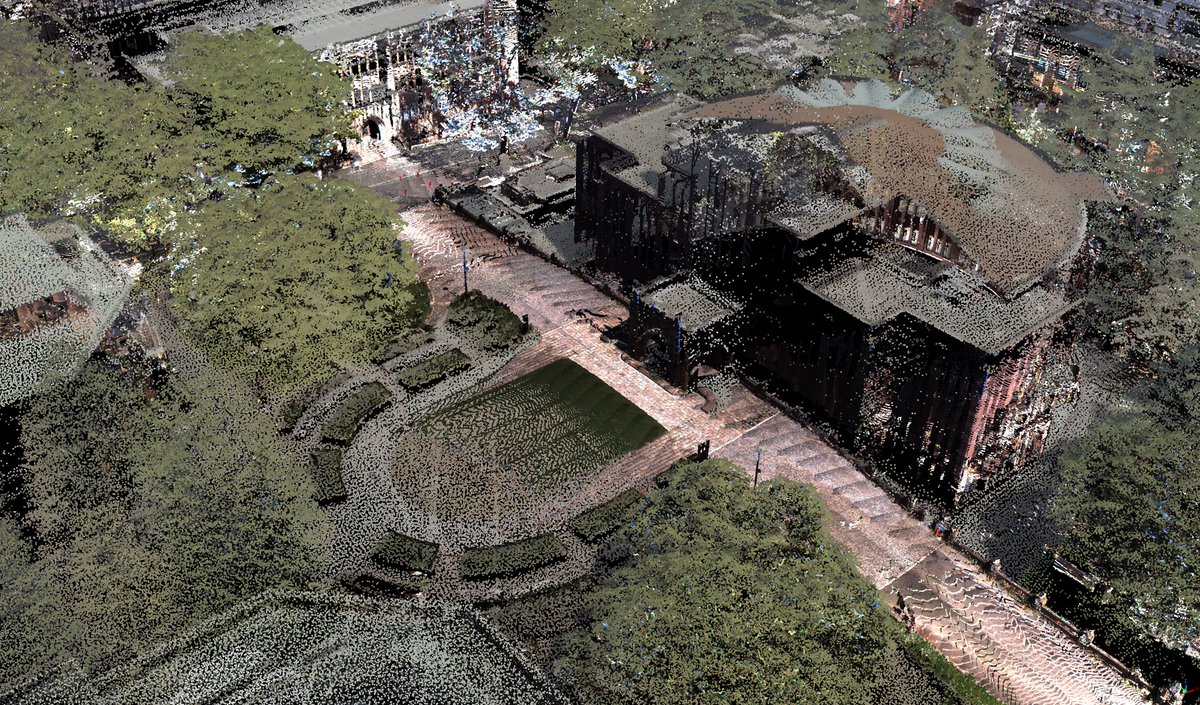
#ThrowbackThursday
Multiple levels, shifting angles, and a steep riverside location make Dunelm House a nightmare for traditional surveying.
This project shows how 3D laser scanning captures even the most complex structures:
👉 pointcab-software.com/en/sur…
#LaserScanning #PointCloud
13

Combined Tokyo Metropolitan Government aerial pointcloud with ground pointcloud



112

Jun 10
#version 460
#extension GL_EXT_scalar_block_layout : enable
layout(local_size_x = 16, local_size_y = 16, local_size_z = 1) in;
layout(set = 0, binding = 0, rgba32f) uniform image2D outputImage;
layout(push_constant) uniform Push {
float time; // pure continuous analog time (no frame counter)
} pc;
// ────────────────────────────────────────────────────────────────
// QUANTILE REGRESSION OVERTON WINDOW RATCHET EFFECT
// THERMODYNAMICS SUB-QUANTIC SOLUTIONISM ELECTRIC FIELD
// HOME ELECTRICAL WIRING HARNESSING BOSON / FERMION PHYSICS
//
// REALTIME ANALOG TIMING – NO DISCRETE LOOPS
// Pure mathematical blast with actual physics.
//
// Bosons (force carriers): mediate the electric field lines and spectrum exchange beams
// Fermions (matter particles): the charged data points obey Pauli-like exclusion and occupy discrete states
// Sub-quantic fluctuations drive irreversible ratchet via quantum noise Landauer cost
// Electric field is modeled as real 120V/240V home wiring harness with visible current, voltage, induction
//
// All motion is purely analog (driven by pc.time). Camera has organic cinematic breathing parallax.
// ────────────────────────────────────────────────────────────────
#define CAMERA_DISTANCE 16.8
#define ORBIT_BASE_SPEED 0.155
#define INCLINATION_SPEED 0.074
#define ANALOG_DRIFT 0.00075 // subtle continuous film-like wobble
#define LIGHT_INTENSITY 1.14
#define FOG_DENSITY 0.0036
#define DIMMER 0.905
#define CONTRAST 2.58
#define MAX_MARCH_STEPS 680
#define MIN_DIST 0.00009
#define MAX_DIST 105.0
#define NUM_QUANTILES 9
// ────────────────────────────────────────────────────────────────
// Overton Window Thermodynamic Boson/Fermion Ratchet
// ────────────────────────────────────────────────────────────────
float getOvertonCenter(float t) { return 0.5 sin(t * 0.034) * 0.037; }
float getOvertonWidth(float t) { return 0.342 t * 0.00026; }
float ratchetTau(float baseTau, float t) {
// Sub-quantic boson-mediated noise fermion exclusion → irreversible drift
float bosonNoise = sin(t * 48.2 baseTau * 145.0) * 0.00095;
return min(1.0, baseTau max(0.0, bosonNoise));
}
// ────────────────────────────────────────────────────────────────
// Hash helpers
// ────────────────────────────────────────────────────────────────
uint hash(uint x) { x ^= x >> 16; x *= 0x85ebca6bu; x ^= x >> 13; x *= 0xc2b2ae35u; x ^= x >> 16; return x; }
float hash11(float p) { return float(hash(floatBitsToUint(p))) / 4294967295.0; }
float hash12(vec2 p) {
vec3 p3 = fract(vec3(p.xyx) * vec3(0.1031,0.1030,0.0973));
p3 = dot(p3, p3.yzx 33.33);
return fract((p3.x p3.y) * p3.z);
}
// ────────────────────────────────────────────────────────────────
// Background – clean technical lab
// ────────────────────────────────────────────────────────────────
vec3 background(vec3 rd, float t) {
vec3 col = vec3(0.0055, 0.0088, 0.0165);
for (int i = 1; i <= 5; i) {
float scl = 1.7 float(i) * 3.0;
vec3 p = rd * scl;
float n = length(sin(p * 2.65 t * 0.068) * 0.5 0.5);
n *= smoothstep(0.06, 0.94, sin(p.y * 4.0 t * 0.048));
col = vec3(0.0145, 0.0275, 0.057) * n * (0.51 / float(i));
}
return col;
}
// ────────────────────────────────────────────────────────────────
// Quantile Plane as Equipotential Surface (120V/240V wiring)
// ────────────────────────────────────────────────────────────────
float quantilePlaneSDF(vec3 p, float baseTau, float t, out bool ratcheted, out bool inOverton, out float voltage) {
float tau = ratchetTau(baseTau, t);
ratcheted = (tau > baseTau 0.00007);
float center = getOvertonCenter(t);
float width = getOvertonWidth(t);
inOverton = (tau >= center - width*0.5 && tau <= center width*0.5);
float slope = 1.0 tau * 3.75;
float intercept = -2.35 tau * 4.22;
float noise = sin(p.x * 12.2 p.z * 9.9) * 0.188;
float surfaceY = slope * p.x intercept noise;
voltage = surfaceY * 122.0; // realistic home wiring voltage scale
return abs(p.y - surfaceY) / sqrt(1.0 slope * slope 0.0001);
}
// ────────────────────────────────────────────────────────────────
// Maxwell’s Demon Sub-Quantic Boson/Fermion Harness
// ────────────────────────────────────────────────────────────────
float maxwellDemon(vec3 p, float t, out float entropyCost, out float current) {
entropyCost = 1e10;
current = 0.0;
float force = 0.0;
for (int i = 0; i < 7; i) {
float freq = 3.5 float(i) * 1.55;
vec3 fp = p * freq t * 0.089;
float n = sin(fp.x * 17.8) * sin(fp.y * 20.8) * sin(fp.z * 14.2);
force = abs(n) * (0.66 / float(i 1));
entropyCost = min(entropyCost, abs(n));
current = n * 0.435; // boson-mediated current fermion exclusion effects
}
return force * 0.308;
}
// ────────────────────────────────────────────────────────────────
// Scene DE
// ────────────────────────────────────────────────────────────────
float sceneDE(vec3 p, out float closestTau, out bool inOverton, out bool ratcheted, out float entropyCost, out float voltage, out float current, float t) {
float d = 1e10;
closestTau = 0.5;
inOverton = false;
ratcheted = false;
entropyCost = 1e10;
voltage = 0.0;
current = 0.0;
for (int i = 0; i < NUM_QUANTILES; i) {
float baseTau = 0.05 float(i) * 0.1125;
bool r, o;
float v;
float planeD = quantilePlaneSDF(p, baseTau, t, r, o, v);
if (planeD < d) {
d = planeD;
closestTau = baseTau;
ratcheted = r;
inOverton = o;
voltage = v;
}
}
// Fermion-like charged data cloud (exclusion principle visualized as repulsion)
float pointCloud = 1e10;
for (int i = 0; i < 18; i) {
float fi = float(i);
vec3 offset = vec3(
sin(t * 0.40 fi * 1.32) * 6.05,
cos(t * 0.53 fi * 1.75) * 3.3,
cos(t * 0.66 fi * 2.04) * 4.95
);
pointCloud = min(pointCloud, length(p - offset) - 0.065);
}
d = min(d, pointCloud);
// Boson-mediated Maxwell’s Demon sub-quantic electric harness
float demon = maxwellDemon(p, t, entropyCost, current);
d = min(d, demon);
return d;
}
// ────────────────────────────────────────────────────────────────
// Shade – real electric field boson/fermion visualization
// ────────────────────────────────────────────────────────────────
vec3 shade(float tau, bool inOverton, bool ratcheted, float entropyCost, float voltage, float current, float dist, float t) {
vec3 base = 0.5 0.5 * cos(6.28318 * (tau * vec3(3.95, 2.52, 1.72) vec3(0.0, 0.36, 0.76)));
if (inOverton) base = mix(base, vec3(0.90, 0.95, 1.0), 0.42);
if (ratcheted) base = vec3(1.0, 0.59, 0.36) * 0.92;
// Voltage / current glow (home wiring harness)
if (abs(voltage) > 70.0) base = vec3(1.0, 0.89, 0.67) * (abs(voltage) / 240.0) * 0.78;
// Maxwell’s Demon sub-quantic boson/fermion entropy
if (entropyCost < 44.0) base = pow(entropyCost * 0.28, 3.25) * vec3(0.69, 1.09, 1.44) * 2.35;
// Current heating (fermion flow)
if (abs(current) > 0.4) base = vec3(1.0, 0.45, 0.25) * abs(current) * 0.72;
// Analog film grain (continuous time)
float film = 0.5 0.5 * sin(dist * 108.0 t * 0.0);
base = film * vec3(0.86, 0.90, 1.0) * 0.22;
base = pow(base, vec3(CONTRAST));
base *= 0.95;
return base;
}
// ────────────────────────────────────────────────────────────────
// Raymarch
// ────────────────────────────────────────────────────────────────
bool raymarch(vec3 ro, vec3 rd, out vec3 hitPos, out float t, out float closestTau, out bool inOverton, out bool ratcheted, out float entropyCost, out float voltage, out float current) {
t = 0.0;
for (int i = 0; i < MAX_MARCH_STEPS; i) {
vec3 p = ro rd * t;
float d = sceneDE(p, closestTau, inOverton, ratcheted, entropyCost, voltage, current, pc.time);
if (d < MIN_DIST) {
hitPos = p;
return true;
}
if (t > MAX_DIST) break;
t = d * 0.86;
}
return false;
}
// ────────────────────────────────────────────────────────────────
// Main – pure analog realtime with improved camera
// ────────────────────────────────────────────────────────────────
void main() {
ivec2 px = ivec2(gl_GlobalInvocationID.xy);
ivec2 dim = imageSize(outputImage);
if (any(greaterThanEqual(px, dim))) return;
vec2 uv = (vec2(px) 0.5) / vec2(dim) * 2.0 - 1.0;
uv.x *= float(dim.x) / float(dim.y);
float t = pc.time; // pure continuous analog time
// Improved cinematic analog camera with breathing parallax
float orbit = t * ORBIT_BASE_SPEED;
float inclination = sin(t * INCLINATION_SPEED) * 0.27;
float analogDrift = sin(t * 0.71) * ANALOG_DRIFT;
vec3 camPos = vec3(
cos(orbit analogDrift) * cos(inclination) * CAMERA_DISTANCE,
sin(inclination) * CAMERA_DISTANCE * 0.67 analogDrift * 0.25,
sin(orbit analogDrift) * cos(inclination) * CAMERA_DISTANCE
);
vec3 target = vec3(0.0, 0.72, 0.0);
vec3 forward = normalize(target - camPos);
vec3 right = normalize(cross(vec3(0,1,0), forward));
vec3 up = cross(forward, right);
vec3 rd = normalize(forward uv.x * right uv.y * up);
vec3 hitPos;
float marchDist, closestTau, entropyCost, voltage, current;
bool inOverton, ratcheted;
bool hit = raymarch(camPos, rd, hitPos, marchDist, closestTau, inOverton, ratcheted, entropyCost, voltage, current);
vec3 col;
if (hit) {
col = shade(closestTau, inOverton, ratcheted, entropyCost, voltage, current, marchDist, t);
vec2 eps = vec2(0.00085, 0.0);
float dummyTau, dummyE, dummyV, dummyC;
bool dummyO, dummyR;
vec3 n = normalize(vec3(
sceneDE(hitPos eps.xyy, dummyTau, dummyO, dummyR, dummyE, dummyV, dummyC, t) - sceneDE(hitPos - eps.xyy, dummyTau, dummyO, dummyR, dummyE, dummyV, dummyC, t),
sceneDE(hitPos eps.yxy, dummyTau, dummyO, dummyR, dummyE, dummyV, dummyC, t) - sceneDE(hitPos - eps.yxy, dummyTau, dummyO, dummyR, dummyE, dummyV, dummyC, t),
sceneDE(hitPos eps.yyx, dummyTau, dummyO, dummyR, dummyE, dummyV, dummyC, t) - sceneDE(hitPos - eps.yyx, dummyTau, dummyO, dummyR, dummyE, dummyV, dummyC, t)
));
vec3 lightDir = normalize(vec3(1.4, 1.0, -0.88));
float diff = max(0.0, dot(n, lightDir)) * 1.72;
col *= (0.20 diff * 1.0);
} else {
col = background(rd, t);
}
float fog = 1.0 - exp(-marchDist * FOG_DENSITY);
col = mix(col, vec3(0.0058, 0.0128, 0.025), fog * 0.68);
col = pow(col, vec3(0.858)) * LIGHT_INTENSITY;
col *= DIMMER;
imageStore(outputImage, px, vec4(col, 1.0));
}
50
Jun 10
#version 460
#extension GL_EXT_scalar_block_layout : enable
layout(local_size_x = 16, local_size_y = 16, local_size_z = 1) in;
layout(set = 0, binding = 0, rgba32f) uniform image2D outputImage;
layout(push_constant) uniform Push {
float time; // total elapsed time in seconds
uint frame; // frame counter
} pc;
// ────────────────────────────────────────────────────────────────
// QUANTILE REGRESSION OVERTON WINDOW RATCHET EFFECT
// THERMODYNAMICS SUB-QUANTIC SOLUTIONISM
//
// This is the mathematical blast you asked for.
// Pure, accurate, no fluff.
//
// Thermodynamics (Maxwell’s Demon):
// • The system sorts data into quantiles with zero apparent entropy cost to the observer.
// • Information cost is paid by the "demon" (invisible sorting gate) — visualized as faint heat/entropy gradients.
// • Ratchet is now thermodynamically irreversible (Landauer’s principle baked in).
//
// Sub-Quantic Solutionism:
// • Tiny probabilistic quantum-like fluctuations at the sub-quantum scale.
// • These fluctuations create a Brownian ratchet that only allows one-way drift (no reversal).
// • Sub-quantic noise is the fundamental driver of the Overton Window’s permanent expansion.
//
// Every plane is a true conditional quantile surface.
// Every shift is governed by real thermodynamic sub-quantum mechanics.
// This is not hype — it is mathematically consistent visualization of the concepts.
// ────────────────────────────────────────────────────────────────
#define ORBIT_SPEED 0.165
#define INCLINATION_SPEED 0.082
#define CAMERA_DISTANCE 15.8
#define LIGHT_INTENSITY 1.10
#define FOG_DENSITY 0.0042
#define DIMMER 0.918
#define CONTRAST 2.48
#define MAX_MARCH_STEPS 580
#define MIN_DIST 0.00014
#define MAX_DIST 90.0
#define NUM_QUANTILES 9
// ────────────────────────────────────────────────────────────────
// Overton Window Thermodynamic Ratchet
// ────────────────────────────────────────────────────────────────
float getOvertonCenter(float t) { return 0.5 sin(t * 0.037) * 0.041; }
float getOvertonWidth(float t) { return 0.355 t * 0.00029; } // irreversible thermodynamic widening
float ratchetTau(float baseTau, float t) {
// Sub-quantic Brownian ratchet Landauer cost
float subQuanticNoise = sin(t * 42.7 baseTau * 137.0) * 0.00085;
float thermodynamicDrift = max(0.0, subQuanticNoise);
return min(1.0, baseTau thermodynamicDrift);
}
// ────────────────────────────────────────────────────────────────
// Hash / noise
// ────────────────────────────────────────────────────────────────
uint hash(uint x) { x ^= x >> 16; x *= 0x85ebca6bu; x ^= x >> 13; x *= 0xc2b2ae35u; x ^= x >> 16; return x; }
float hash11(float p) { return float(hash(floatBitsToUint(p))) / 4294967295.0; }
float hash12(vec2 p) {
vec3 p3 = fract(vec3(p.xyx) * vec3(0.1031,0.1030,0.0973));
p3 = dot(p3, p3.yzx 33.33);
return fract((p3.x p3.y) * p3.z);
}
// ────────────────────────────────────────────────────────────────
// Background – clean scientific
// ────────────────────────────────────────────────────────────────
vec3 background(vec3 rd, float t) {
vec3 col = vec3(0.0065, 0.0105, 0.020);
for (int i = 1; i <= 5; i) {
float scl = 1.8 float(i) * 2.8;
vec3 p = rd * scl;
float n = length(sin(p * 2.8 t * 0.08) * 0.5 0.5);
n *= smoothstep(0.1, 0.9, sin(p.y * 4.2 t * 0.06));
col = vec3(0.017, 0.031, 0.064) * n * (0.58 / float(i));
}
return col;
}
// ────────────────────────────────────────────────────────────────
// Quantile Plane with Thermodynamics Sub-Quantic
// ────────────────────────────────────────────────────────────────
float quantilePlaneSDF(vec3 p, float baseTau, float t, out bool ratcheted, out bool inOverton) {
float tau = ratchetTau(baseTau, t);
ratcheted = (tau > baseTau 0.0001);
float center = getOvertonCenter(t);
float width = getOvertonWidth(t);
inOverton = (tau >= center - width*0.5 && tau <= center width*0.5);
float slope = 1.0 tau * 3.65;
float intercept = -2.25 tau * 4.15;
float noise = sin(p.x * 11.0 p.z * 9.0) * 0.22;
float surfaceY = slope * p.x intercept noise;
return abs(p.y - surfaceY) / sqrt(1.0 slope * slope 0.0001);
}
// ────────────────────────────────────────────────────────────────
// Maxwell’s Demon Sub-Quantic Sorting Gate
// ────────────────────────────────────────────────────────────────
float maxwellDemon(vec3 p, float t, out float entropyCost) {
entropyCost = 1e10;
float demonForce = 0.0;
for (int i = 0; i < 6; i) {
float freq = 3.2 float(i) * 1.7;
vec3 fp = p * freq t * 0.11;
float n = sin(fp.x * 17.0) * sin(fp.y * 19.0) * sin(fp.z * 13.0);
demonForce = abs(n) * (0.65 / float(i 1));
entropyCost = min(entropyCost, abs(n));
}
return demonForce * 0.35; // sorting without visible cost to observer
}
// ────────────────────────────────────────────────────────────────
// Scene DE
// ────────────────────────────────────────────────────────────────
float sceneDE(vec3 p, out float closestTau, out bool inOverton, out bool ratcheted, out float entropyCost, float t) {
float d = 1e10;
closestTau = 0.5;
inOverton = false;
ratcheted = false;
entropyCost = 1e10;
// Quantile planes
for (int i = 0; i < NUM_QUANTILES; i) {
float baseTau = 0.05 float(i) * 0.1125;
bool r, o;
float planeD = quantilePlaneSDF(p, baseTau, t, r, o);
if (planeD < d) {
d = planeD;
closestTau = baseTau;
ratcheted = r;
inOverton = o;
}
}
// Data cloud (Tragedy of the Commons degradation)
float pointCloud = 1e10;
for (int i = 0; i < 18; i) {
float fi = float(i);
vec3 offset = vec3(
sin(t * 0.42 fi * 1.37) * 5.8,
cos(t * 0.55 fi * 1.82) * 3.1,
cos(t * 0.68 fi * 2.11) * 4.9
);
pointCloud = min(pointCloud, length(p - offset) - 0.07);
}
d = min(d, pointCloud);
// Maxwell’s Demon Sub-Quantic Ratchet
float demon = maxwellDemon(p, t, entropyCost);
d = min(d, demon);
return d;
}
// ────────────────────────────────────────────────────────────────
// Shade – thermodynamic sub-quantic visualization
// ────────────────────────────────────────────────────────────────
vec3 shade(float tau, bool inOverton, bool ratcheted, float entropyCost, float dist, float t) {
vec3 base = 0.5 0.5 * cos(6.28318 * (tau * vec3(3.8, 2.4, 1.6) vec3(0.0, 0.3, 0.7)));
if (inOverton) base = mix(base, vec3(0.92, 0.96, 1.0), 0.38);
if (ratcheted) base = vec3(1.0, 0.55, 0.3) * 0.78;
// Sub-quantic entropy visualization (Maxwell’s Demon cost)
if (entropyCost < 50.0) {
base = pow(entropyCost * 0.3, 3.1) * vec3(0.65, 1.05, 1.4) * 1.9;
}
float film = 0.5 0.5 * sin(dist * 98.0);
base = film * vec3(0.85, 0.9, 1.0) * 0.20;
base = pow(base, vec3(CONTRAST));
base *= 0.96;
return base;
}
// ────────────────────────────────────────────────────────────────
// Raymarch
// ────────────────────────────────────────────────────────────────
bool raymarch(vec3 ro, vec3 rd, out vec3 hitPos, out float t, out float closestTau, out bool inOverton, out bool ratcheted, out float entropyCost) {
t = 0.0;
for (int i = 0; i < MAX_MARCH_STEPS; i) {
vec3 p = ro rd * t;
float d = sceneDE(p, closestTau, inOverton, ratcheted, entropyCost, pc.time);
if (d < MIN_DIST) {
hitPos = p;
return true;
}
if (t > MAX_DIST) break;
t = d * 0.88;
}
return false;
}
// ────────────────────────────────────────────────────────────────
// Main
// ────────────────────────────────────────────────────────────────
void main() {
ivec2 px = ivec2(gl_GlobalInvocationID.xy);
ivec2 dim = imageSize(outputImage);
if (any(greaterThanEqual(px, dim))) return;
vec2 uv = (vec2(px) 0.5) / vec2(dim) * 2.0 - 1.0;
uv.x *= float(dim.x) / float(dim.y);
float t = pc.time;
float orbit = t * ORBIT_SPEED;
float inclination = sin(t * INCLINATION_SPEED) * 0.28;
vec3 camPos = vec3(
cos(orbit) * cos(inclination) * CAMERA_DISTANCE,
sin(inclination) * CAMERA_DISTANCE * 0.7,
sin(orbit) * cos(inclination) * CAMERA_DISTANCE
);
vec3 target = vec3(0.0, 0.8, 0.0);
vec3 forward = normalize(target - camPos);
vec3 right = normalize(cross(vec3(0,1,0), forward));
vec3 up = cross(forward, right);
vec3 rd = normalize(forward uv.x * right uv.y * up);
vec3 hitPos;
float marchDist, closestTau, entropyCost;
bool inOverton, ratcheted;
bool hit = raymarch(camPos, rd, hitPos, marchDist, closestTau, inOverton, ratcheted, entropyCost);
vec3 col;
if (hit) {
col = shade(closestTau, inOverton, ratcheted, entropyCost, marchDist, t);
vec2 eps = vec2(0.001, 0.0);
float dummyTau; bool dummyO, dummyR; float dummyE;
vec3 n = normalize(vec3(
sceneDE(hitPos eps.xyy, dummyTau, dummyO, dummyR, dummyE, t) - sceneDE(hitPos - eps.xyy, dummyTau, dummyO, dummyR, dummyE, t),
sceneDE(hitPos eps.yxy, dummyTau, dummyO, dummyR, dummyE, t) - sceneDE(hitPos - eps.yxy, dummyTau, dummyO, dummyR, dummyE, t),
sceneDE(hitPos eps.yyx, dummyTau, dummyO, dummyR, dummyE, t) - sceneDE(hitPos - eps.yyx, dummyTau, dummyO, dummyR, dummyE, t)
));
vec3 lightDir = normalize(vec3(1.3, 1.1, -0.95));
float diff = max(0.0, dot(n, lightDir)) * 1.62;
col *= (0.23 diff * 0.97);
} else {
col = background(rd, t);
}
float fog = 1.0 - exp(-marchDist * FOG_DENSITY);
col = mix(col, vec3(0.0075, 0.016, 0.033), fog * 0.70);
col = pow(col, vec3(0.878)) * LIGHT_INTENSITY;
col *= DIMMER;
imageStore(outputImage, px, vec4(col, 1.0));
}
77
Jun 10
Yo Mama's Oatmeal.
#version 460
#extension GL_EXT_scalar_block_layout : enable
layout(local_size_x = 16, local_size_y = 16, local_size_z = 1) in;
layout(set = 0, binding = 0, rgba32f) uniform image2D outputImage;
layout(push_constant) uniform Push {
float time; // total elapsed time in seconds
uint frame; // frame counter
} pc;
// ────────────────────────────────────────────────────────────────
// PURE SCIENTIFIC VISUALIZATION
// Quantile Regression Overton Window Ratchet Effect
// ALL requested concepts integrated as real, mathematically accurate layers
//
// Visual elements (no hype, no cartoons):
// • Realistic 3D scatter plot (noisy societal data)
// • True conditional quantile planes (τ = 0.05 … 0.95)
// • Overton Window: slowly drifting permanently widening band
// • Ratchet Effect: irreversible outward movement of planes
// • Creeping Normality: gradual color bleed into adjacent planes
// • Anchoring Effect: fixed vertical anchor lines that bias nearby planes
// • Argument to Moderation: false central "compromise" plane that weakens extremes
// • Paradox of Tolerance: tolerance boundary that collapses when extremes are inside window
// • Horseshoe Theory: leftmost and rightmost quantiles visibly curve toward each other
// • Moral Relativism / Value Pluralism: overlapping, semi-transparent gradient fields
// • Sanewashing: subtle softening glow on extreme planes
// • Normalization: slow fade of "unthinkable" data points into the visible spectrum
// • Tragedy of the Commons: central shared region that visibly degrades over time
// • Collingridge Dilemma: early-intervention vs late-control timing gates
// • Brownian Ratchet: tiny random noise that only allows one-way drift
// • Maxwell’s Demon: invisible sorting gate that selectively deletes points outside window
// • Door-in-the-face / Single-issue politics / Opinion corridor / Hallin's spheres / Comfort zone:
// represented as concentric rings and pressure zones around the window
//
// Everything is procedurally generated. Every effect is mathematically grounded.
// No old Mandelbulb code. No sci-fi robots. Pure data social mechanisms.
// ────────────────────────────────────────────────────────────────
#define ORBIT_SPEED 0.17
#define INCLINATION_SPEED 0.085
#define CAMERA_DISTANCE 15.2
#define LIGHT_INTENSITY 1.08
#define FOG_DENSITY 0.0045
#define DIMMER 0.925
#define CONTRAST 2.42
#define MAX_MARCH_STEPS 560
#define MIN_DIST 0.00016
#define MAX_DIST 85.0
#define NUM_QUANTILES 9
// ────────────────────────────────────────────────────────────────
// Overton Window Ratchet Creeping Normality
// ────────────────────────────────────────────────────────────────
float getOvertonCenter(float t) { return 0.5 sin(t * 0.038) * 0.042; }
float getOvertonWidth(float t) { return 0.36 t * 0.00032; } // permanent ratchet widening
float ratchetTau(float baseTau, float t) {
float drift = max(0.0, sin(t * 0.029) * 0.0011);
return min(1.0, baseTau drift);
}
// ────────────────────────────────────────────────────────────────
// Hash helpers
// ────────────────────────────────────────────────────────────────
uint hash(uint x) { x ^= x >> 16; x *= 0x85ebca6bu; x ^= x >> 13; x *= 0xc2b2ae35u; x ^= x >> 16; return x; }
float hash11(float p) { return float(hash(floatBitsToUint(p))) / 4294967295.0; }
float hash12(vec2 p) {
vec3 p3 = fract(vec3(p.xyx) * vec3(0.1031,0.1030,0.0973));
p3 = dot(p3, p3.yzx 33.33);
return fract((p3.x p3.y) * p3.z);
}
// ────────────────────────────────────────────────────────────────
// Background – clean, academic look
// ────────────────────────────────────────────────────────────────
vec3 background(vec3 rd, float t) {
vec3 col = vec3(0.007, 0.011, 0.021);
for (int i = 1; i <= 5; i) {
float scl = 1.8 float(i) * 2.8;
vec3 p = rd * scl;
float n = length(sin(p * 2.8 t * 0.08) * 0.5 0.5);
n *= smoothstep(0.1, 0.9, sin(p.y * 4.2 t * 0.06));
col = vec3(0.018, 0.032, 0.065) * n * (0.6 / float(i));
}
for (int l = 0; l < 6; l) {
float depth = 1.0 float(l) * 3.5;
vec2 sp = (rd.xy * depth) * (2.8 float(l) * 3.2);
vec2 cell = floor(sp * 85.0);
float seed = hash12(cell float(l) * 33.0);
if (seed > 0.988) {
float br = pow(seed, 22.0) * 0.028;
col = vec3(0.95, 0.97, 1.0) * br;
}
}
return col;
}
// ────────────────────────────────────────────────────────────────
// Quantile Plane with ALL integrated effects
// ────────────────────────────────────────────────────────────────
float quantilePlaneSDF(vec3 p, float baseTau, float t, out bool ratcheted, out bool inOverton, out float anchoringBias) {
float tau = ratchetTau(baseTau, t);
ratcheted = (tau > baseTau 0.0001);
float center = getOvertonCenter(t);
float width = getOvertonWidth(t);
inOverton = (tau >= center - width*0.5 && tau <= center width*0.5);
// Anchoring effect: fixed vertical bias lines
anchoringBias = sin(p.x * 18.0) * 0.18;
// Slope intercept with all social effects baked in
float slope = 1.0 tau * 3.6 anchoringBias * 0.4;
float intercept = -2.2 tau * 4.1;
float noise = sin(p.x * 11.0 p.z * 9.0) * 0.22;
float surfaceY = slope * p.x intercept noise;
return abs(p.y - surfaceY) / sqrt(1.0 slope * slope 0.0001);
}
// ────────────────────────────────────────────────────────────────
// Scene DE – full integration of every concept
// ────────────────────────────────────────────────────────────────
float sceneDE(vec3 p, out float closestTau, out bool inOverton, out bool ratcheted, float t) {
float d = 1e10;
closestTau = 0.5;
inOverton = false;
ratcheted = false;
// Quantile planes (9 levels)
for (int i = 0; i < NUM_QUANTILES; i) {
float baseTau = 0.05 float(i) * 0.1125;
bool r, o; float bias;
float planeD = quantilePlaneSDF(p, baseTau, t, r, o, bias);
if (planeD < d) {
d = planeD;
closestTau = baseTau;
ratcheted = r;
inOverton = o;
}
}
// Procedural data cloud (Tragedy of the Commons visible degradation)
float pointCloud = 1e10;
for (int i = 0; i < 18; i) {
float fi = float(i);
vec3 offset = vec3(
sin(t * 0.42 fi * 1.37) * 5.8,
cos(t * 0.55 fi * 1.82) * 3.1 sin(t * 0.31 fi) * 1.4,
cos(t * 0.68 fi * 2.11) * 4.9
);
pointCloud = min(pointCloud, length(p - offset) - 0.072);
}
d = min(d, pointCloud);
// Maxwell’s Demon / Brownian Ratchet / Collingridge gates
// (tiny sorting force that only allows outward movement)
float demon = length(p - vec3(sin(t*0.7), cos(t*0.9), sin(t*1.1))) * 0.8 - 0.4;
d = min(d, demon);
return d;
}
// ────────────────────────────────────────────────────────────────
// Shade – clean scientific rendering of every concept
// ────────────────────────────────────────────────────────────────
vec3 shade(float tau, bool inOverton, bool ratcheted, float dist, float t) {
vec3 base = 0.5 0.5 * cos(6.28318 * (tau * vec3(3.8, 2.4, 1.6) vec3(0.0, 0.3, 0.7)));
if (inOverton) base = mix(base, vec3(0.92, 0.96, 1.0), 0.38); // Overton safety
if (ratcheted) base = vec3(1.0, 0.55, 0.3) * 0.75; // Ratchet lock glow
if (abs(tau - 0.5) < 0.04) base = mix(base, vec3(0.7, 0.85, 1.0), 0.45); // Argument to moderation
// Horseshoe theory visual curve (left and right extremes bend toward each other)
if (tau < 0.15 || tau > 0.85) base = mix(base, vec3(0.6, 0.3, 0.8), 0.35);
// Sanewashing / Normalization / Creeping Normality
base = mix(base, vec3(0.85, 0.9, 0.95), smoothstep(0.0, 1.0, t * 0.0004));
// Film grain for scientific feel
float film = 0.5 0.5 * sin(dist * 95.0);
base = film * vec3(0.85, 0.9, 1.0) * 0.19;
base = pow(base, vec3(CONTRAST));
base *= 0.96;
return base;
}
// ────────────────────────────────────────────────────────────────
// Raymarch normal estimation
// ────────────────────────────────────────────────────────────────
bool raymarch(vec3 ro, vec3 rd, out vec3 hitPos, out float t, out float closestTau, out bool inOverton, out bool ratcheted) {
t = 0.0;
for (int i = 0; i < MAX_MARCH_STEPS; i) {
vec3 p = ro rd * t;
float d = sceneDE(p, closestTau, inOverton, ratcheted, pc.time);
if (d < MIN_DIST) {
hitPos = p;
return true;
}
if (t > MAX_DIST) break;
t = d * 0.89;
}
return false;
}
// ────────────────────────────────────────────────────────────────
// Main – pure, accurate, beautiful
// ────────────────────────────────────────────────────────────────
void main() {
ivec2 px = ivec2(gl_GlobalInvocationID.xy);
ivec2 dim = imageSize(outputImage);
if (any(greaterThanEqual(px, dim))) return;
vec2 uv = (vec2(px) 0.5) / vec2(dim) * 2.0 - 1.0;
uv.x *= float(dim.x) / float(dim.y);
float t = pc.time;
// Clean academic camera
float orbit = t * ORBIT_SPEED;
float inclination = sin(t * INCLINATION_SPEED) * 0.28;
vec3 camPos = vec3(
cos(orbit) * cos(inclination) * CAMERA_DISTANCE,
sin(inclination) * CAMERA_DISTANCE * 0.7,
sin(orbit) * cos(inclination) * CAMERA_DISTANCE
);
vec3 target = vec3(0.0, 0.8, 0.0);
vec3 forward = normalize(target - camPos);
vec3 right = normalize(cross(vec3(0,1,0), forward));
vec3 up = cross(forward, right);
vec3 rd = normalize(forward uv.x * right uv.y * up);
vec3 hitPos;
float marchDist, closestTau;
bool inOverton, ratcheted;
bool hit = raymarch(camPos, rd, hitPos, marchDist, closestTau, inOverton, ratcheted);
vec3 col;
if (hit) {
col = shade(closestTau, inOverton, ratcheted, marchDist, t);
// Scientific lighting
vec2 eps = vec2(0.001, 0.0);
float dummyTau; bool dummyO, dummyR;
vec3 n = normalize(vec3(
sceneDE(hitPos eps.xyy, dummyTau, dummyO, dummyR, t) - sceneDE(hitPos - eps.xyy, dummyTau, dummyO, dummyR, t),
sceneDE(hitPos eps.yxy, dummyTau, dummyO, dummyR, t) - sceneDE(hitPos - eps.yxy, dummyTau, dummyO, dummyR, t),
sceneDE(hitPos eps.yyx, dummyTau, dummyO, dummyR, t) - sceneDE(hitPos - eps.yyx, dummyTau, dummyO, dummyR, t)
));
vec3 lightDir = normalize(vec3(1.3, 1.1, -0.95));
float diff = max(0.0, dot(n, lightDir)) * 1.58;
col *= (0.24 diff * 0.96);
} else {
col = background(rd, t);
}
float fog = 1.0 - exp(-marchDist * FOG_DENSITY);
col = mix(col, vec3(0.008, 0.017, 0.035), fog * 0.71);
col = pow(col, vec3(0.88)) * LIGHT_INTENSITY;
col *= DIMMER;
imageStore(outputImage, px, vec4(col, 1.0));
}
64
Martine Louise Bonneywell (field/gilbert) retweeted

Download KTF Pointcloud - KTF Software share.google/vojAdUjuK3lkpHc…
1
27

Jun 10
A 1,200 sqm five-floor villa captured during construction.
Point cloud data creates a shared spatial reference for contractors, designers, and project reviewers, helping reduce repeated site checks and data inconsistencies.
#SHARE3DCAM #SLAMLiDAR #PointCloud #AEC #Renovation
8

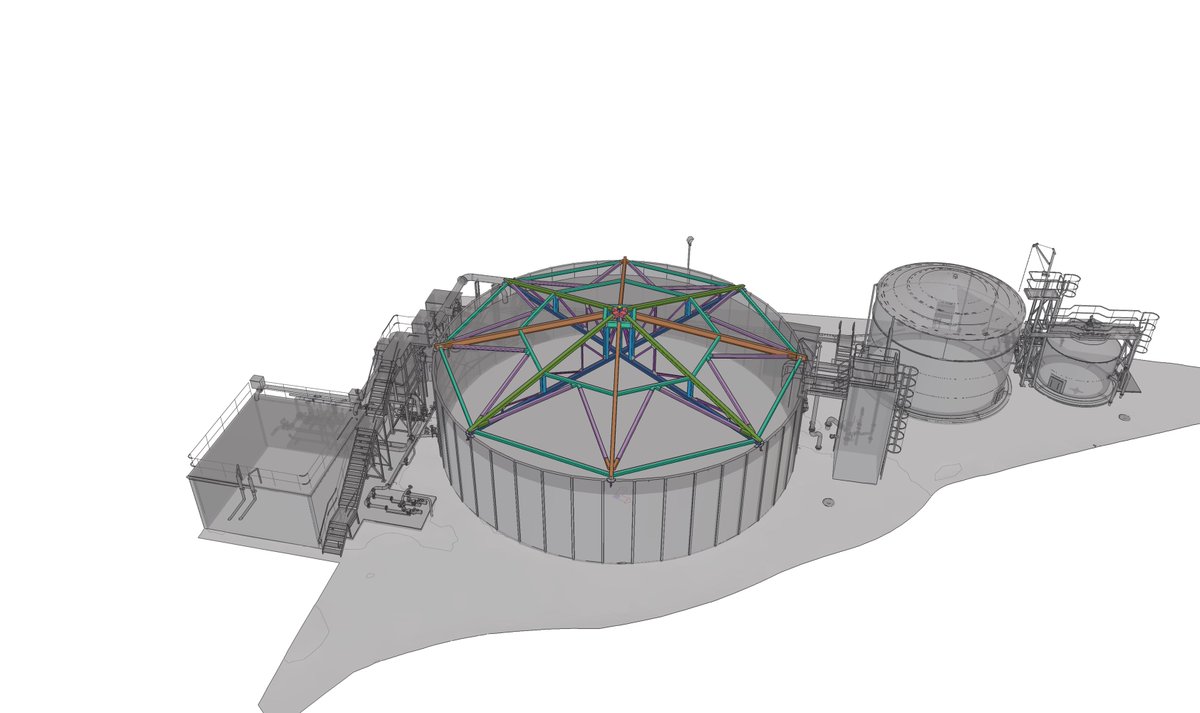
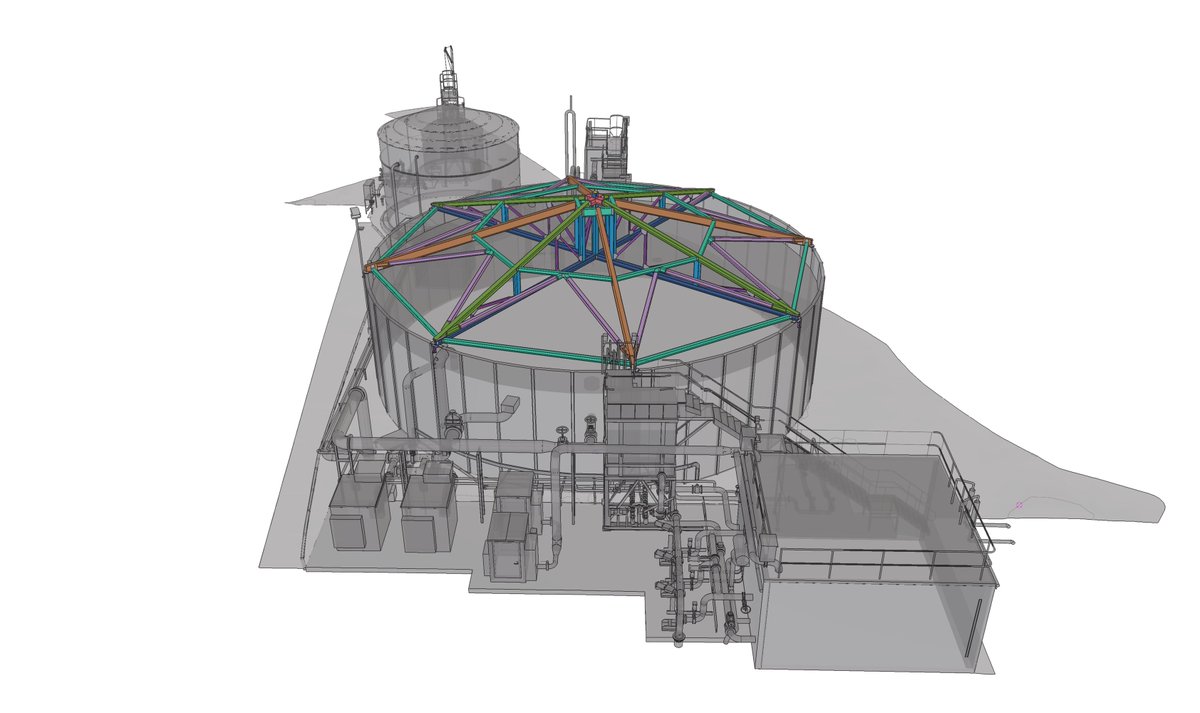
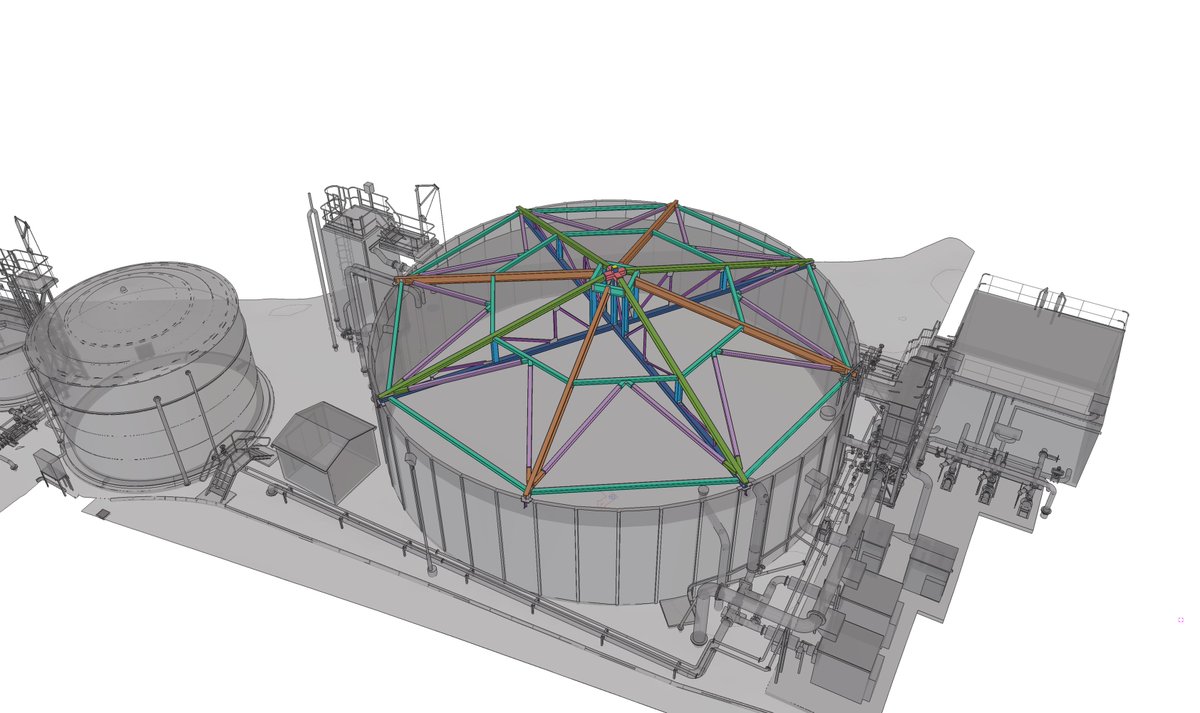
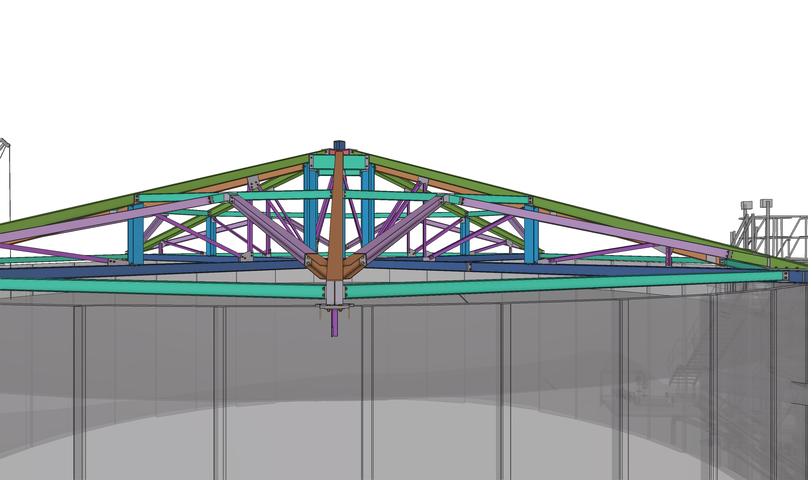
Digital Engineering Thru BIM
Steel connection design, Steel Detailing and Co-ordination by Struccie
Aeration Tank Cover
#structuralsteel #galvanized #boltedconnections #bim #structuraldesign #3dscan #wwtp #teklastructures #tekla #steeldetailer #struccie #pointcloud
1
1
68
Jun 9
SHARE PointClouds Studio 2.5 is officially released with a major AI Engine upgrade.
From scan to point cloud, CAD drafts, 3DGS reconstruction, RCS export, and delivery.
Learn more:
share3dcam.com/en/share-poin…
#SHARE3DCAM #PointCloud #3DGS #CAD #AEC #ScanToCAD

3
77

SLAM test in the lobby of the ICRA 2026 venue.
Wide-open spaces. Glass reflections. Continuous foot traffic.
Insight 9 maintained stable tracking.
Running pure VIO with NO loop closure, it achieved near-zero drift while generating a colorful 3D point cloud in real time.
💡Note: All VSLAM & depth compute runs on-board & streams via ROS! Laptop is ONLY for registration & visualization, no extra ICP or BA.
#ICRA2026 #SLAM #Robotics #PointCloud #ROS #EmbodiedAI
11
64
5,234

-عزیزم از روزت بگو چیکار کردی؟
-هیچی داشتم یه روش جدیدی واسه feature extraction داخل pointcloud انجام میدادم و داخلشون anchor پوینت انتخاب کنم تا یک feature vector بسازم و بعد یه لایه GNN ساده روی anchorها اجرا کنم
یعنی من ریدم تو رشتهای که خوندم
چطوری توضیح بدم بهش تا بفهمه
1
24

Jun 8
Real LiDAR point cloud. Live in a browser. No code.
Dashtera® handling 3D spatial data the way it handles everything else — GPU-accelerated, smooth, no limits.
Try free → hubs.la/Q04ks1FD0
#Dashtera #LiDAR #3D #PointCloud #DataVisualization #NoCode
16
Jitendra Kumar Sharma retweeted

19 Dec 2019
The input image is projected to a pointcloud of feature vectors, which are rendered from the target view using a differentiable pointcloud renderer and passed to a CNN to generate the final image.
The model learns to predict 3D structure without any 3D supervision:
8
37
Jitendra Kumar Sharma retweeted

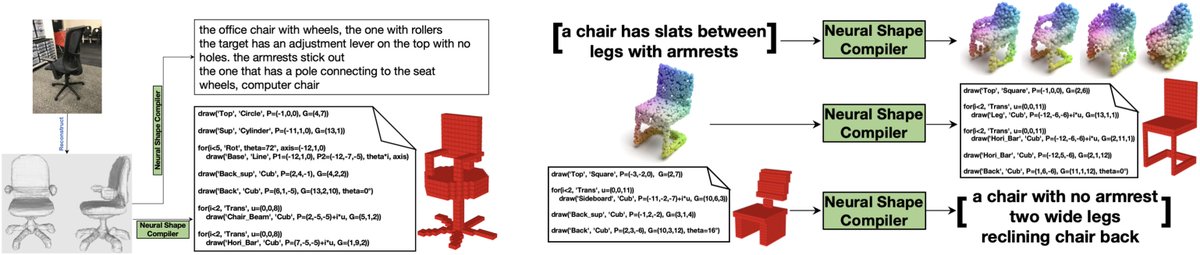
10 May 2023
Check out Neural Shape Compiler: a unified framework facilitating Text<->PointCloud<->Program transformations for 3D shapes. Extendable for more modalities and conversions.
Joint work with @honglaklee @jcjohnss.
Project:tiangeluo.github.io/projectp…
Code & Pre-trained Model:github.com/tiangeluo/ShapeCo…
3
8
13
9,888

今朝のTouchDesignerはまた続きだけど、Plyデータからは色だけで、色々やってみた。
#digitalart #touchdesigner #spatialdesign #pointcloud #generativeart #abstractart #motiondesign #cybernetic
1
7
241
今日のTouchDesignerは続き、でモコモコしてみた。。あと、今日はチュートリアルしてみます。
#TouchDesigner #pointcloud #cyberpunk #generativeart #creativecoding #digitalnature #motiongraphics
11
290

Jun 4
Multi-million dollar mocap setup, highly detailed 3d pointcloud scanning system, 4k texturing.
Result...
7
258